



虚功原理:当应变发生微小变化时,内部产生的应变能与外载荷对其做功相等,即
δU=δV (8-1)
式中,U为应变能;V=V1+V2+V3为外力做功;δ为虚位移算子。
虚应变能为

式中,{ε}为应变矢量;{σ}为应力矢量;vol为单元体积。
假定材料和几何是线性的,则

应变与节点位移的关系:
{ε}=[B]{u} (8-4)
式中,[B]为应变位移矩阵,取决于单元的形函数;{u}为节点位移矢量。
假定下面的计算在笛卡儿坐标系中,把式(8-4)代入式(8-3),得

接下来,考虑外力的虚功。首先考虑惯性影响:

式中,[w]为每个点上的位移矢量;{Fa}为产生加速度的力矢量。
然后考虑牛顿第二定律:

式中,ρ为密度,可以利用MP命令输入,t为时间。
单元内部的位移与节点位移关系为
{w}=[N]{u} (8-8)
式中,[N]为形函数矩阵。
假设单元密度为常量,并利用式(8-6)~式(8-8),得(https://www.xing528.com)

压力矢量形成的外力功为

式中,{P}为使用的压力矢量(通常仅一个非零分量);areap为压力的作用面。
由式(8-8)和式(8-10),得

除非另有说明,否则压力总是施加在单元的外表面并且总垂直于曲面。
第3种外力功为节点力作的功:

式中, 为施加在单元上的节点力。
为施加在单元上的节点力。
最终,由式(8-5)、式(8-8)、式(8-8)和式(8-12),得

考虑到{δu}是一系列的虚位移矢量,因此式(8-13)可以化简为

式中, 为单元刚度矩阵;
为单元刚度矩阵; 为单元质量矩阵;
为单元质量矩阵; 为加速度矢量(如重力加速度);
为加速度矢量(如重力加速度); 为单元压力矢量。
为单元压力矢量。
式(8-14)为单元基本的平衡代数方程,则线弹性静力学结构的总体平衡方程为
[K]{u}={F} (8-15)
式中,[K]为结构总体刚度矩阵;{u}为结构节点位移矢量;{F}为结构载荷矢量,包括节点载荷、压力载荷和惯性载荷。
以上所讨论的矩阵和载荷矢量都是“一致性”的,即使用同样的形函数来确定。但其他的形式也是存在的,如质量矩阵为对角阵则要使用(LUMPM,ON)来形成集中质量。大多数集中质量矩阵中不包含转动自由度。如果要求删除转动自由度,这样形成的矩阵或载荷矢量称为“缩减形式”。因此使用缩减型压力载荷矢量不会产生力矩。使用一致性压力载荷矢量在结构中会产生错误的内力矩。例如,一个薄的圆柱体承受内压作用并且使用不规则壳单元分析,如图8-1所示,可以看出一致性压力载荷矢量在两个相邻的、尺寸不同的单元上产生了不正确的力矩。
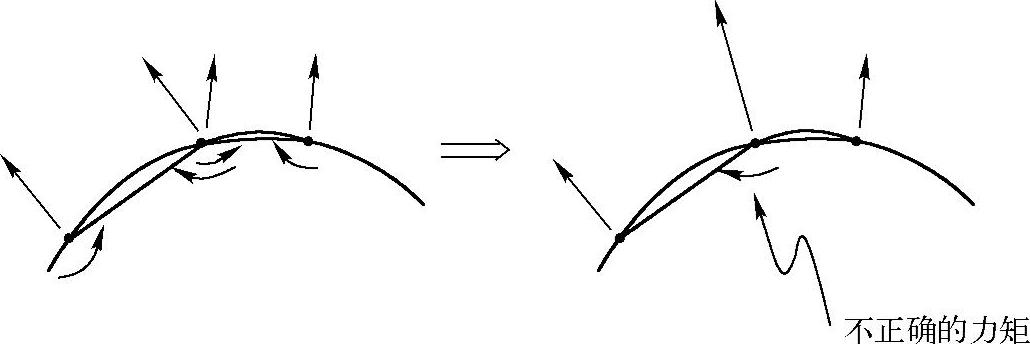
图8-1 一致性压力载荷的影响
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。