



实例概述:
本实例模拟了牛头刨床工作时的运动过程,该运动过程是通过曲柄的旋转使摇杆进行往返摇摆,从而带动滑块1做直线往返运动。通过本实例的学习读者不仅可以掌握通过creo进行动态仿真的方法,并可以学习到牛头刨床机构的运动过程。
Task1.装配模型
Step1.新建装配模型。选择下拉菜单 命令,将工作目录设置至D:\creoins1\work\ch10\ins41\。单击“新建”按钮
命令,将工作目录设置至D:\creoins1\work\ch10\ins41\。单击“新建”按钮 ,选中
,选中 选项组下的
选项组下的 单选项。选中
单选项。选中 选项组下的
选项组下的 单选项。)在
单选项。)在 文本框中输入文件名planer_asm;通过取消
文本框中输入文件名planer_asm;通过取消 复选框中的“√”号,来取消“使用默认模板”。单击该对话框中的
复选框中的“√”号,来取消“使用默认模板”。单击该对话框中的 按钮。在模板选项组中,选取
按钮。在模板选项组中,选取 模板命令。单击该对话框中的
模板命令。单击该对话框中的 按钮。
按钮。
Step2.增加图41.1所示的第一个固定元件:支架(bracket)零件。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开名为bracket.prt的零件。在该操控板中单击
,打开名为bracket.prt的零件。在该操控板中单击 按钮,在“放置”界面的
按钮,在“放置”界面的 下拉列表中选择
下拉列表中选择 选项,
选项,
Step3.在模型树界面中,选择 命令;在弹出的“模型树项”对话框中,选中
命令;在弹出的“模型树项”对话框中,选中 复选框,然后单击对话框中的
复选框,然后单击对话框中的 按钮。在模型树中选取基准平面ASM_RIGHT、ASM_TOP、ASM_FRONT并右击,从图41.2所示的快捷菜单中选择
按钮。在模型树中选取基准平面ASM_RIGHT、ASM_TOP、ASM_FRONT并右击,从图41.2所示的快捷菜单中选择 命令。效果如图41.3所示。
命令。效果如图41.3所示。
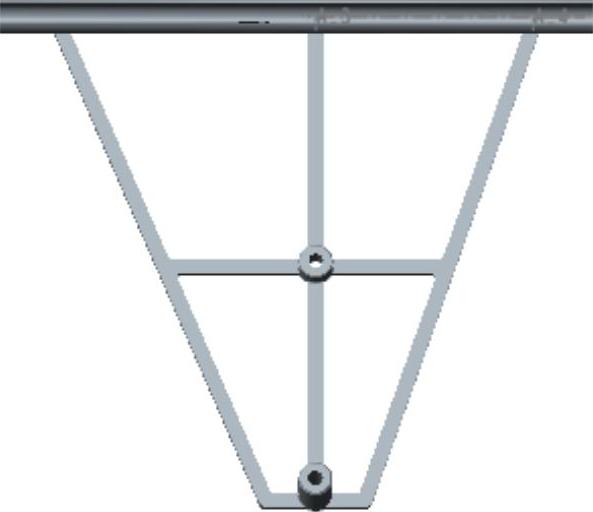
图41.1 将滑块1零件装入支架中
图41.2 快捷菜单

图41.3 模型树
Step4.单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开名为slider_01.prt的零件。在约束集列表中选取
,打开名为slider_01.prt的零件。在约束集列表中选取 选项。在弹出的操控板中单击
选项。在弹出的操控板中单击 按钮,选取图41.4中所示的两条轴线为“轴对齐”约束选取参考。单击操控板中的
按钮,选取图41.4中所示的两条轴线为“轴对齐”约束选取参考。单击操控板中的 按钮,
按钮,
Step5.单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 。单击
。单击 功能选项卡
功能选项卡 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 。单击“点拖动”按钮
。单击“点拖动”按钮 。在元件slider_01上选择一点,然后在该位置处单击,出现一个标记
。在元件slider_01上选择一点,然后在该位置处单击,出现一个标记 ,移动鼠标光标,选取的点将跟随光标移动,当移到图41.5所示的位置时,单击鼠标,终止拖移操作,使元件slider_01停留在刚才拖移的位置,然后关闭“拖动”对话框。
,移动鼠标光标,选取的点将跟随光标移动,当移到图41.5所示的位置时,单击鼠标,终止拖移操作,使元件slider_01停留在刚才拖移的位置,然后关闭“拖动”对话框。
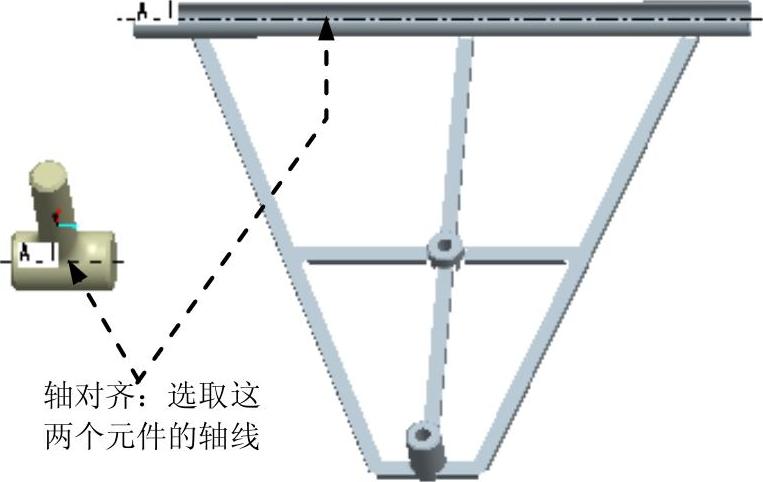
图41.4 装配滑块1
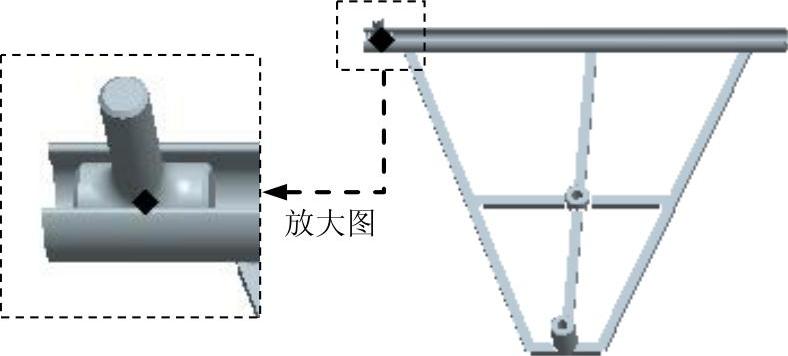
图41.5 拖移滑块1零件
特别注意:以后每次增加一个元件(无论是固定元件还是连接元件)都要按与本步骤相同的操作方法,验证装配和连接的有效性正和确性,以便及时发现问题进行修改。增加固定元件时,如果不能顺利进入机构环境,则必须重新装配;如果能够顺利进入机构环境,则可选取任意一个连接元件拖动即可。
Step6.增加连接元件:将曲柄(brace)装入支架中,创建销钉(Pin)连接,如图41.6所示。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开文件名为brace.prt的零件。在约束集列表中选取
,打开文件名为brace.prt的零件。在约束集列表中选取 选项。在弹出的操控板中单击
选项。在弹出的操控板中单击 按钮。选取图41.7中所示的两条轴线为“轴对齐”约束的参考。分别选取图41.7中的两个平面(元件brace的表平面和元件bracket的表平面)为“平移”约束的参考。单击操控板中的
按钮。选取图41.7中所示的两条轴线为“轴对齐”约束的参考。分别选取图41.7中的两个平面(元件brace的表平面和元件bracket的表平面)为“平移”约束的参考。单击操控板中的 按钮。
按钮。
Step7.增加连接元件:将滑块2装入曲柄中,创建销钉(Pin)连接,如图41.8所示。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开文件名为slider_02.prt的零件。在约束集列表中选取
,打开文件名为slider_02.prt的零件。在约束集列表中选取 选项。在弹出的操控板中单击
选项。在弹出的操控板中单击 按钮。选取图41.9中所示的两条轴线为“轴对齐”约束的参考。分别选取图41.9中的两个平面(元件brace的表平面和元件bracket的表平面)为“平移”约束的参考。单击操控板中的
按钮。选取图41.9中所示的两条轴线为“轴对齐”约束的参考。分别选取图41.9中的两个平面(元件brace的表平面和元件bracket的表平面)为“平移”约束的参考。单击操控板中的 按钮。
按钮。
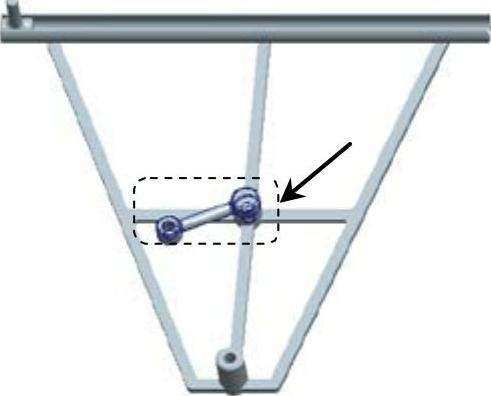
图41.6 将曲柄装入支架中

图41.8 将滑块2装入曲柄中
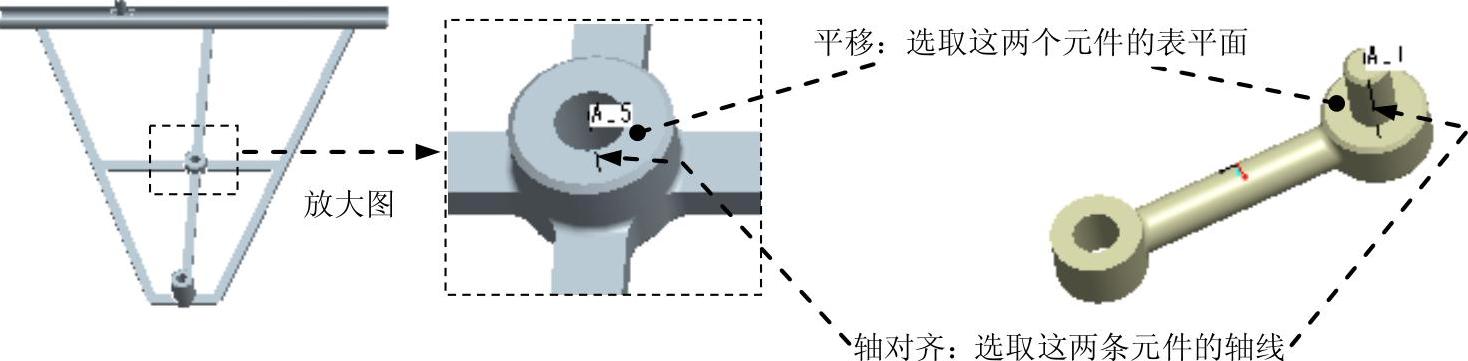
图41.7 装配曲柄

图41.9 装配滑块2
Step8.增加连接元件:将摇杆装入支架和滑块2中,分别创建销钉(Pin)连接和圆柱(cylinder)连接,如图41.10所示。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开文件名为rocker.prt的零件。在约束集列表中选取
,打开文件名为rocker.prt的零件。在约束集列表中选取 选项。在弹出的操控板中单击
选项。在弹出的操控板中单击 按钮。选取图41.11中的两条轴线(元件rocker的A_1轴线和元件bracket的A_6轴线)为“轴对齐”约束的参考。分别选取图41.11中的两个平面(元件rocker的表平面和元件bracket的表平面)为“平移”约束的参考。单击“放置”界面中的“新设置”,在
按钮。选取图41.11中的两条轴线(元件rocker的A_1轴线和元件bracket的A_6轴线)为“轴对齐”约束的参考。分别选取图41.11中的两个平面(元件rocker的表平面和元件bracket的表平面)为“平移”约束的参考。单击“放置”界面中的“新设置”,在 中选择
中选择 选项。选取图41.12所示的两条轴线(元件rocker的A_2轴线和元件slider_02的A_1轴线)为“轴对齐”约束的参考。单击操控板中的
选项。选取图41.12所示的两条轴线(元件rocker的A_2轴线和元件slider_02的A_1轴线)为“轴对齐”约束的参考。单击操控板中的 按钮。
按钮。
图41.10 将摇杆装入支架和滑块2中

图41.11 创建销钉(Pin)连接
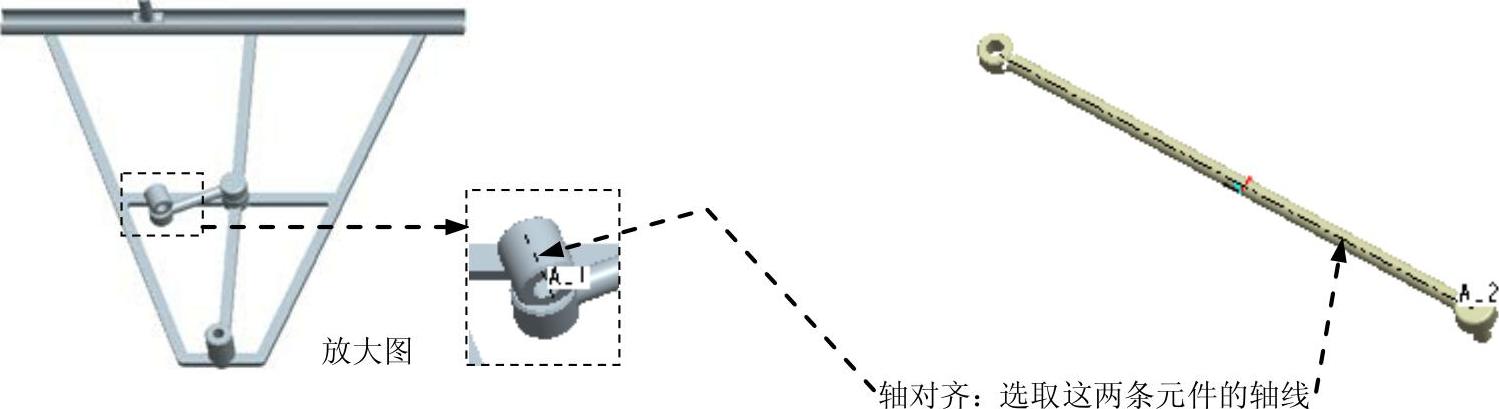
图41.12 创建圆柱(cylinder)连接(https://www.xing528.com)
Step9.增加连接元件:将连杆装入摇杆和滑块1中,创建两个销钉(Pin)接头连接,如图41.13所示。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开文件名为connecting_rod.prt的零件。在约束集列表中选取
,打开文件名为connecting_rod.prt的零件。在约束集列表中选取 选项。在弹出的操控板中单击
选项。在弹出的操控板中单击 按钮。选取图41.14中的两条轴线(元件connecting_rod的A_1轴线和元件rocker的A_3轴线)为“轴对齐”约束的参考。分别选取图41.14中的两个平面(元件connecting_rod的表平面和元件rocker的表平面)为“平移”约束的参考。单击“放置”界面中的“新设置”,在
按钮。选取图41.14中的两条轴线(元件connecting_rod的A_1轴线和元件rocker的A_3轴线)为“轴对齐”约束的参考。分别选取图41.14中的两个平面(元件connecting_rod的表平面和元件rocker的表平面)为“平移”约束的参考。单击“放置”界面中的“新设置”,在 中选择
中选择 选项。然后选取图41.15所示的两条轴线(元件connecting_rod的A_3轴线和元件slider_01的A_2轴线)为“轴对齐”约束的参考。单击操控板中的
选项。然后选取图41.15所示的两条轴线(元件connecting_rod的A_3轴线和元件slider_01的A_2轴线)为“轴对齐”约束的参考。单击操控板中的 按钮。
按钮。
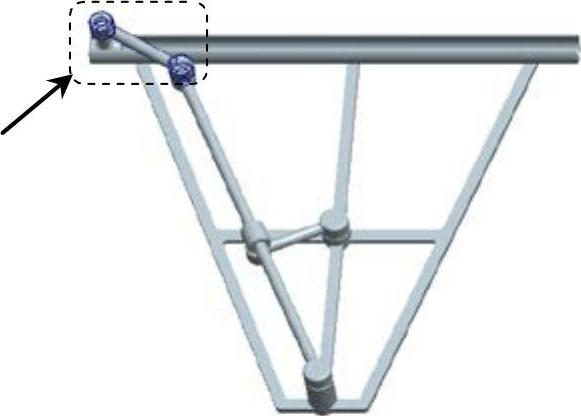
图41.13 将连杆装入摇杆和滑块1中

图41.14 创建销钉(Pin)连接

图41.15 创建销钉(Pin)连接
Task2.定义伺服电动机
Step1.单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 。单击
。单击 功能选项卡
功能选项卡 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 。单击“点拖动”按钮
。单击“点拖动”按钮 。用“点拖动”将刨床机构装配拖到图41.16所示的位置。然后关闭“拖动”对话框。
。用“点拖动”将刨床机构装配拖到图41.16所示的位置。然后关闭“拖动”对话框。
图41.16 运动轴设置
Step2.单击 功能选项卡
功能选项卡 区域中的“伺服电动机”按钮
区域中的“伺服电动机”按钮 ,系统弹出图41.17所示的“伺服电动机定义”对话框。采用系统的默认的名称。在图41.18所示的模型上,采用“从列表中拾取”的方法选取图中的接头,即列表中的连接轴Connection_2c.axis_1。单击对话框中的
,系统弹出图41.17所示的“伺服电动机定义”对话框。采用系统的默认的名称。在图41.18所示的模型上,采用“从列表中拾取”的方法选取图中的接头,即列表中的连接轴Connection_2c.axis_1。单击对话框中的 选项卡,在
选项卡,在 区域的下列表框中选择
区域的下列表框中选择 选项。在
选项。在 区域的下拉列表中选择函数为
区域的下拉列表中选择函数为 ,然后分别在A、B、H、T文本框中键入其参数值0.25、0.5、1、1。在
,然后分别在A、B、H、T文本框中键入其参数值0.25、0.5、1、1。在 文本框中输入360。完成后图41.19所示,单击对话框中的
文本框中输入360。完成后图41.19所示,单击对话框中的 按钮。
按钮。

图41.17 “伺服电动机定义”对话框

图41.18 选取连接轴

图41.19 “轮廓”选项卡
Task3.建立运动分析并运行
Step1.单击 功能选项卡
功能选项卡 区域中的“机构分析”按钮
区域中的“机构分析”按钮 。
。
Step2.此时系统弹出图41.20所示的“分析定义”对话框,采用默认的名称。选取分析的类型为“位置”。在图41.20所示的“分析定义”对话框的 区域下输入开始时间0(单位为秒)。选择测量时间域的方式为
区域下输入开始时间0(单位为秒)。选择测量时间域的方式为 。输入结束时间1(单位为秒)。输入帧频200。在“分析定义”对话框的
。输入结束时间1(单位为秒)。输入帧频200。在“分析定义”对话框的 区域中,选中
区域中,选中 单选项。单击
单选项。单击 按钮。单击“分析定义”对话框中的
按钮。单击“分析定义”对话框中的 按钮,就可以保存运动定义并关闭对话框。
按钮,就可以保存运动定义并关闭对话框。
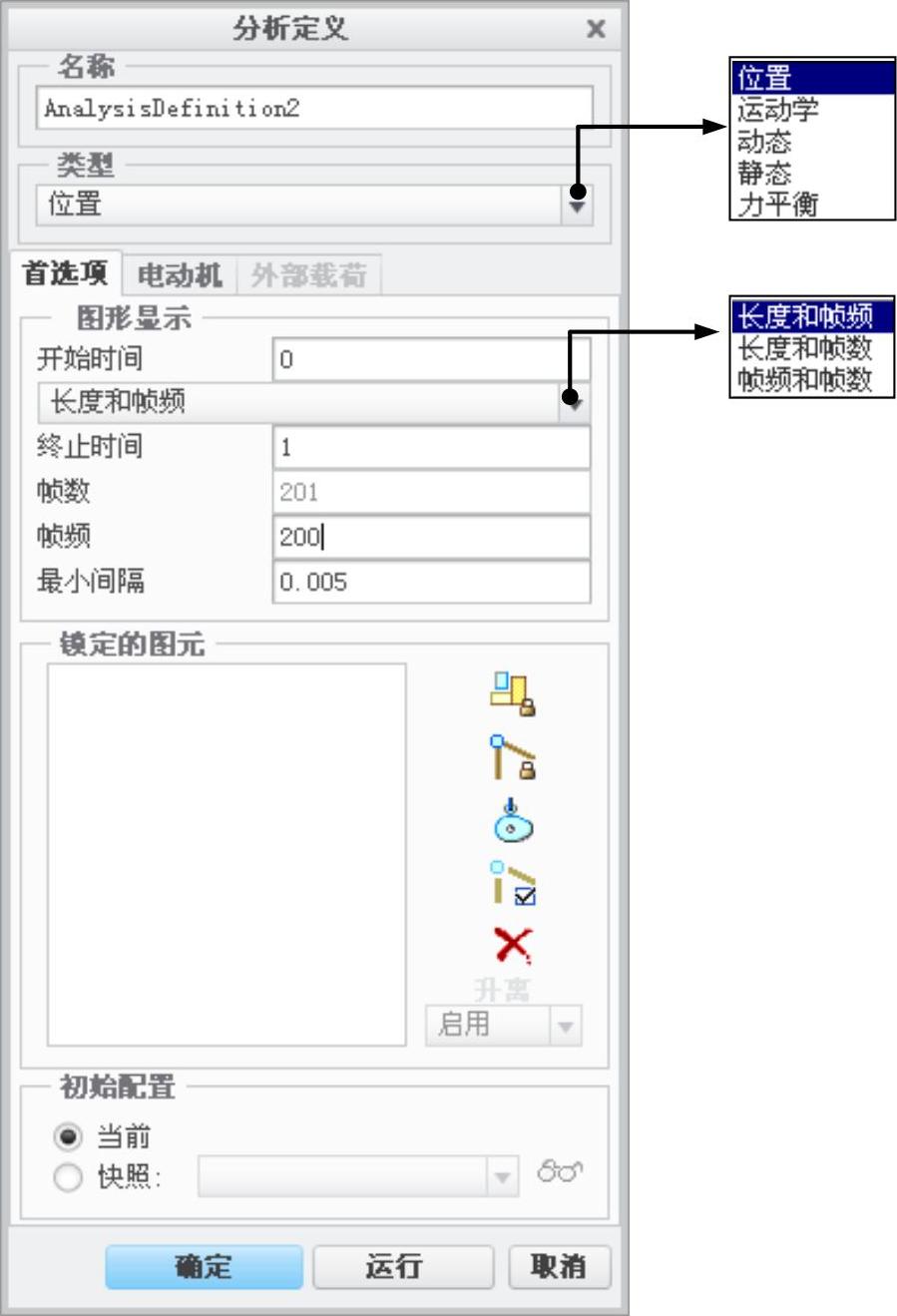
图41.20 “分析定义”对话框
Task4.结果回放与动态干涉检查
Step1.单击 功能选项卡
功能选项卡 区域中的“回放”按钮
区域中的“回放”按钮 。系统弹出图41.21所示的“回放”对话框,从
。系统弹出图41.21所示的“回放”对话框,从 下拉列表中,选取一个运动结果。单击“回放”对话框中的
下拉列表中,选取一个运动结果。单击“回放”对话框中的 按钮,系统弹出图41.22所示的“碰撞检测设置”对话框,在该对话框中选中
按钮,系统弹出图41.22所示的“碰撞检测设置”对话框,在该对话框中选中 单选项。
单选项。

图41.21 “回放”对话框1

图41.22 “碰撞检测设置”对话框
Step2.在对话框的 选项卡中选中
选项卡中选中 ;如果要查看部分片段,则取消选中
;如果要查看部分片段,则取消选中 复选框,这时系统弹出图41.23所示的界面。在“回放”对话框中单击
复选框,这时系统弹出图41.23所示的界面。在“回放”对话框中单击 按钮,系统将弹出图41.24所示的“动画”对话框,可进行回放演示,回放中如果检测到元件干涉,系统将加亮干涉区域并停止回放。回放结束后,在“动画”对话框中单击
按钮,系统将弹出图41.24所示的“动画”对话框,可进行回放演示,回放中如果检测到元件干涉,系统将加亮干涉区域并停止回放。回放结束后,在“动画”对话框中单击 按钮,系统弹出“捕获”对话框,接受默认设置值,单击
按钮,系统弹出“捕获”对话框,接受默认设置值,单击 按钮,即可生成一个*.mpg文件,该文件可以在其他软件(例如Windows Media Player)中播放。完成观测后,单击“回放”对话框中的
按钮,即可生成一个*.mpg文件,该文件可以在其他软件(例如Windows Media Player)中播放。完成观测后,单击“回放”对话框中的 按钮。
按钮。
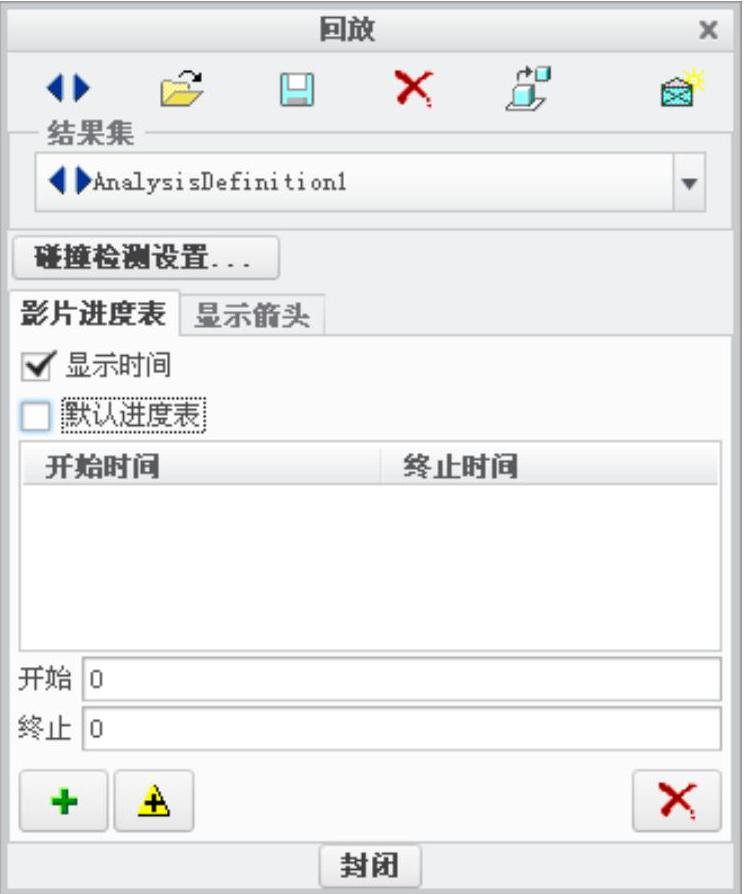
图41.23 “回放”对话框2
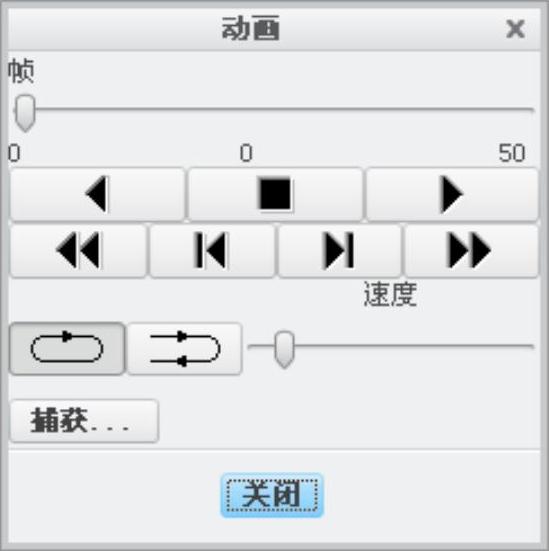
图41.24 “动画”对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。