



【摘要】:图14-3 单片机控制步进电动机加开关程序如下:读者可以根据程序列出步进电动机反向走向的相位列表。只要在P3.2、P3.3分别连接一个按钮,并用外部中断方式处理步进电动机的旋转,程序如下:这个程序在P3.2和P3.3引脚定义了两个按钮,并设置了外部中断0和外部中断1。外部中断程序首先判断步进电机导通相位,然后给出下一个导通相位值,使步进电动机按逆时针方向转动一步。
单片机驱动步进电动机的程序设计如下:

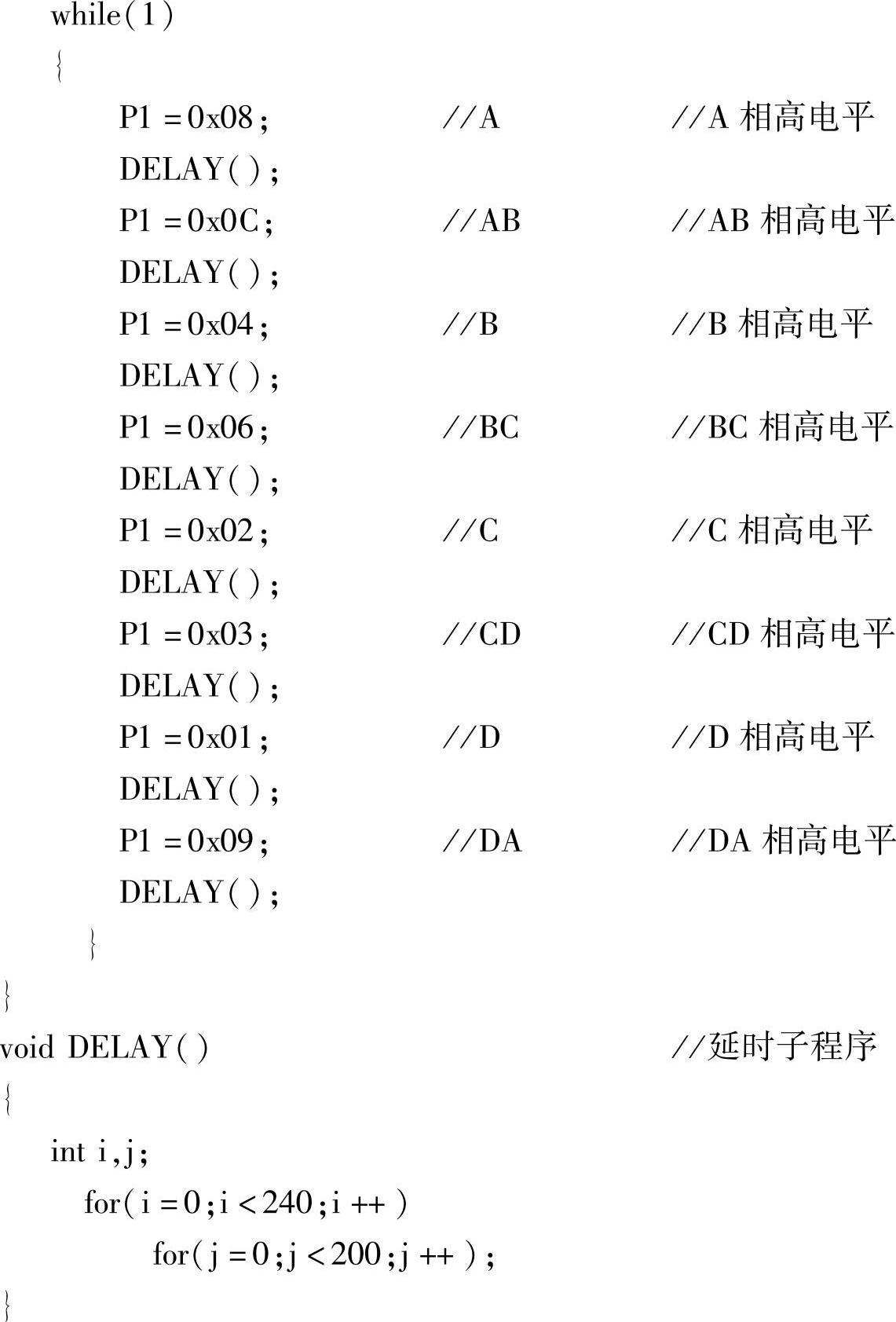
程序通过变换步进电动机的通电相,A—AB—B—BC—C—CD—D—DA—A,按照四相八拍运行方式周而复始使的步进电动机转动起来。我们将上述通电相情况画成表14-2,效果如图14-3所示。
表14-2 单片机引脚数值与步进电动机通电相位
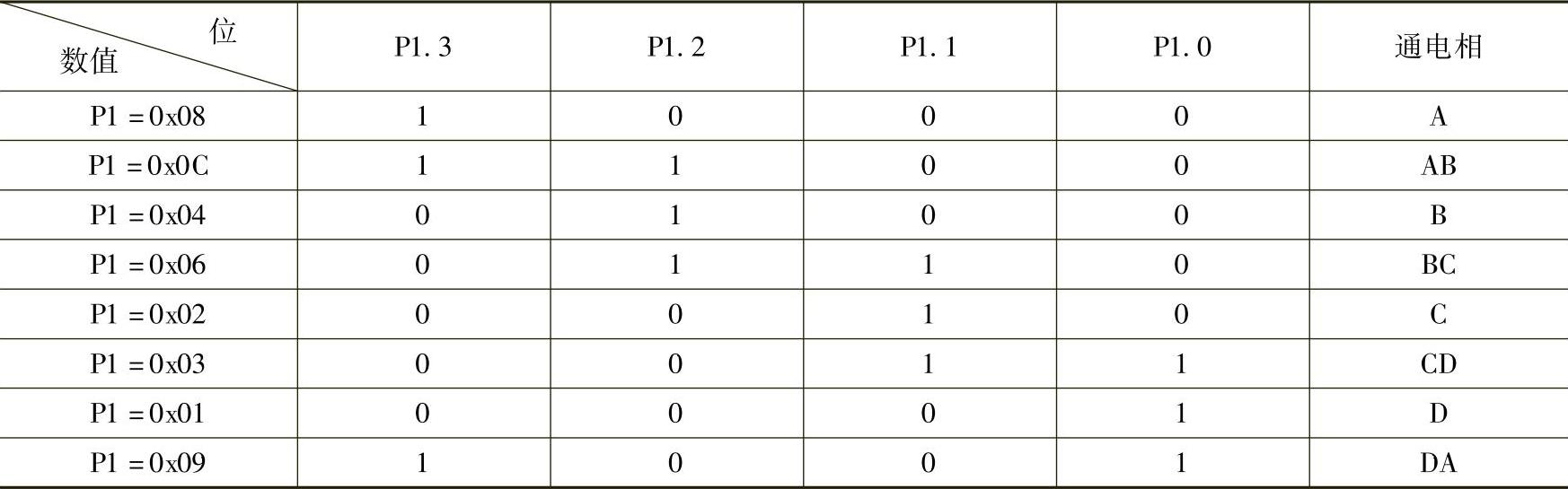
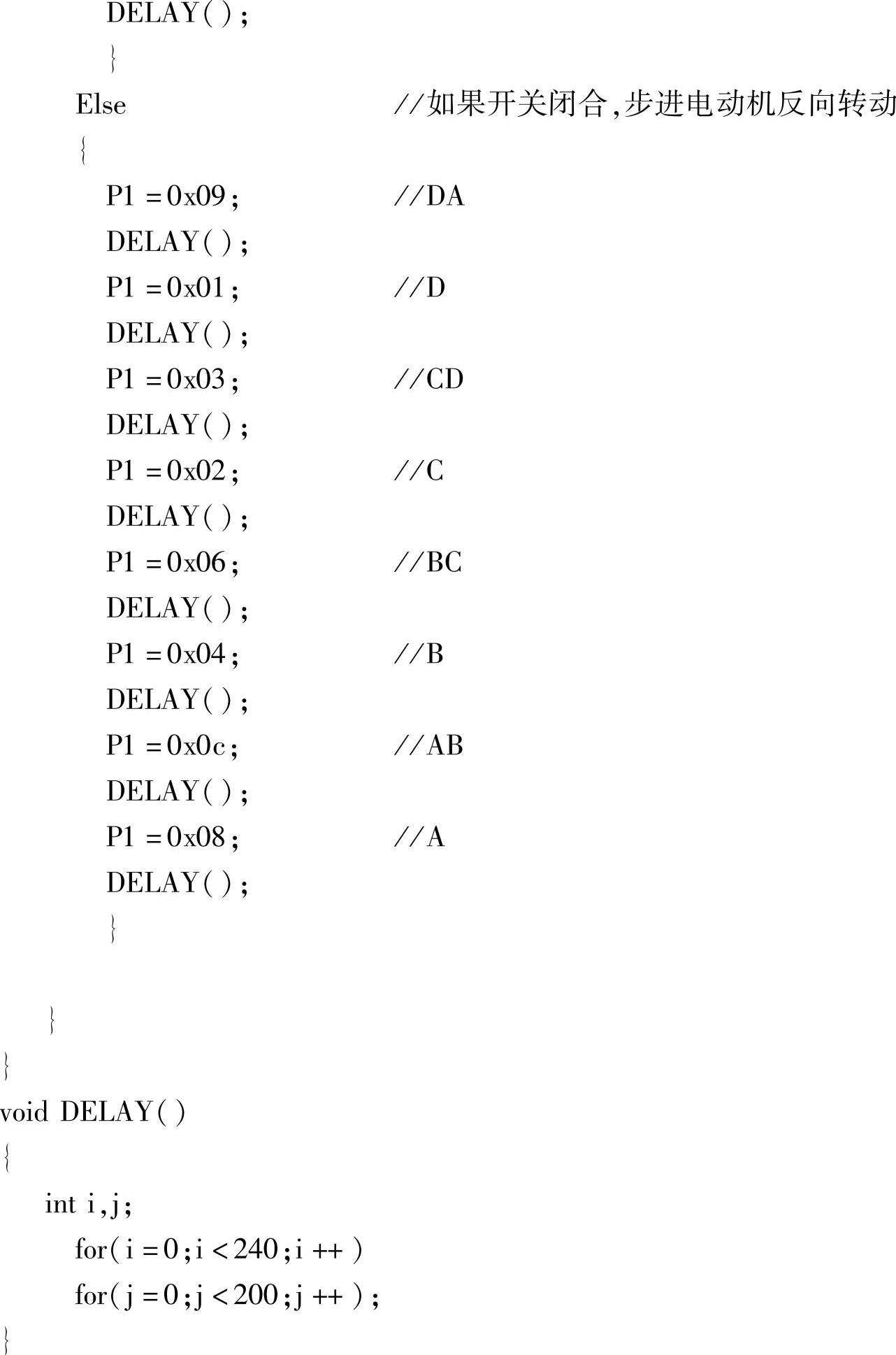
从表格可以看出,高电平1的走向决定的步进电动机的旋转方向,调整P1端口的输出值,就可以使步进电动机按照相反的方向转动。因此,可以在电路中设置一个开关,根据开关的位置,决定让步进电动机旋转方向。
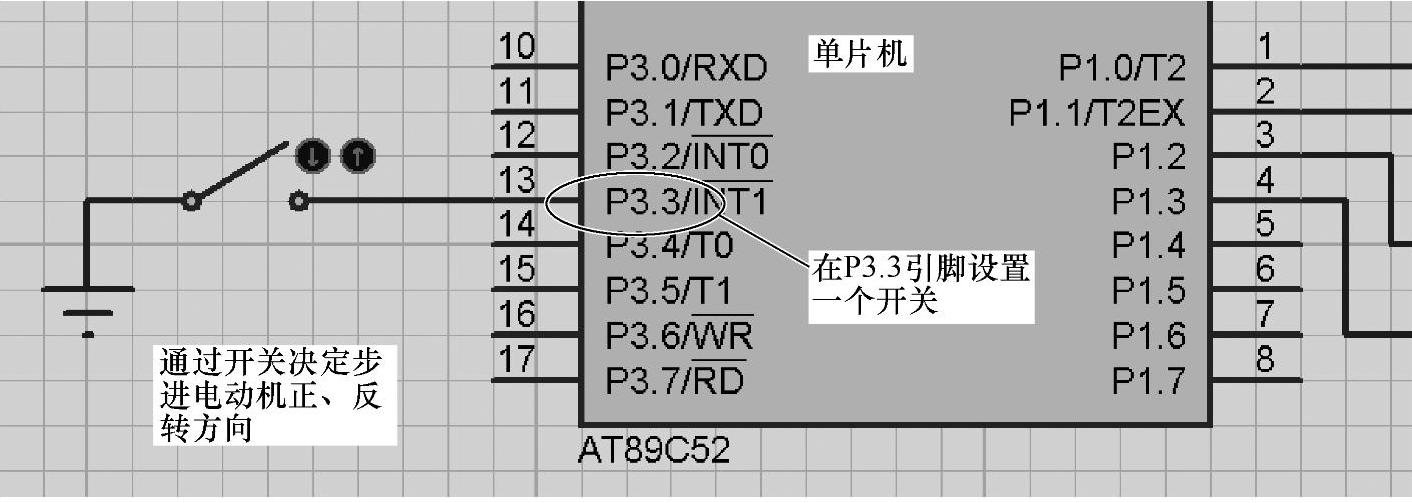
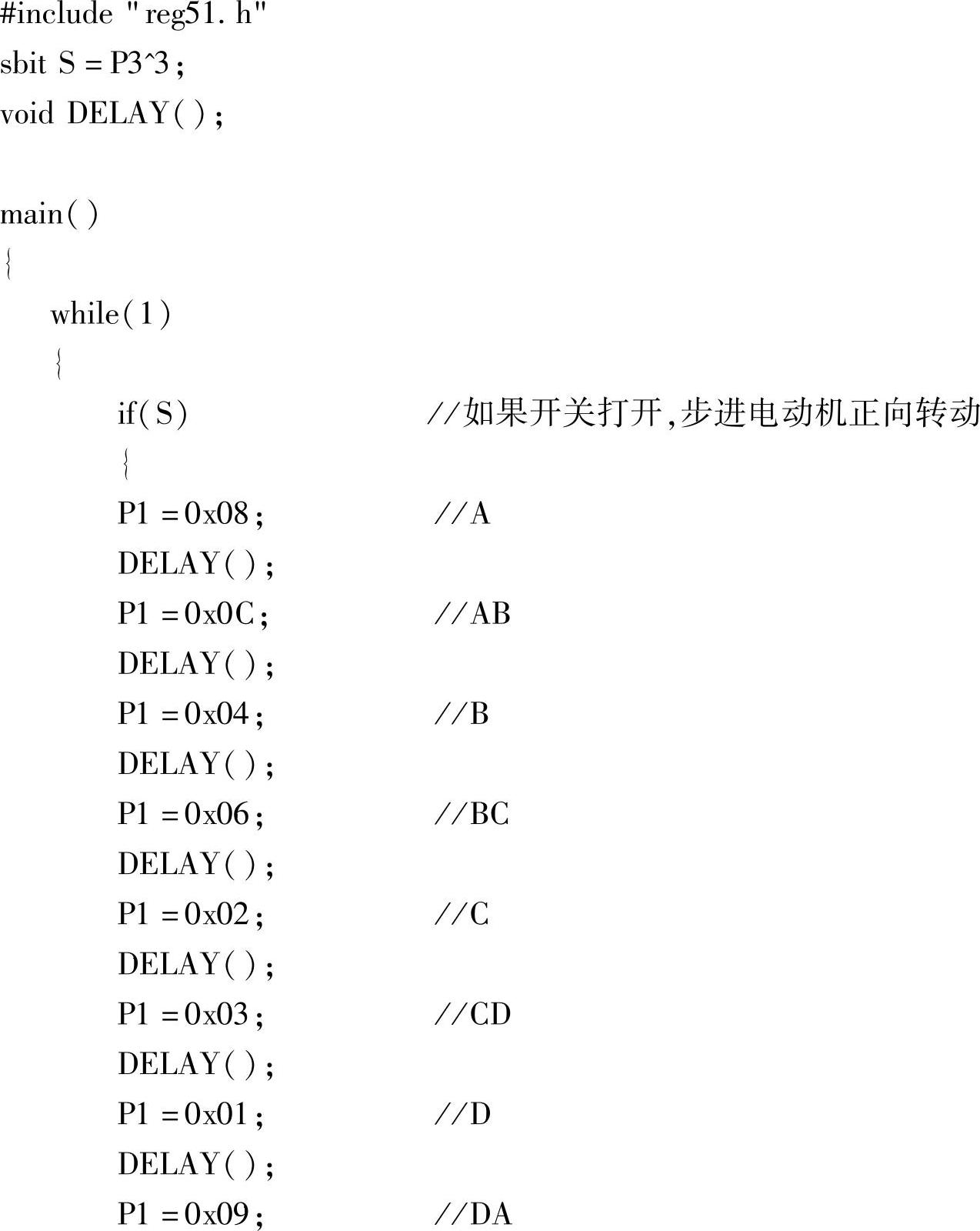
图14-3 单片机控制步进电动机加开关
程序如下:
 (https://www.xing528.com)
(https://www.xing528.com)
读者可以根据程序列出步进电动机反向走向的相位列表。
前面我们只做到了步进电动机的正反转旋转,下面我们要实现用按钮实现步进,即按一下,步进电机前进或后退一步。只要在P3.2、P3.3分别连接一个按钮,并用外部中断方式处理步进电动机的旋转,程序如下:
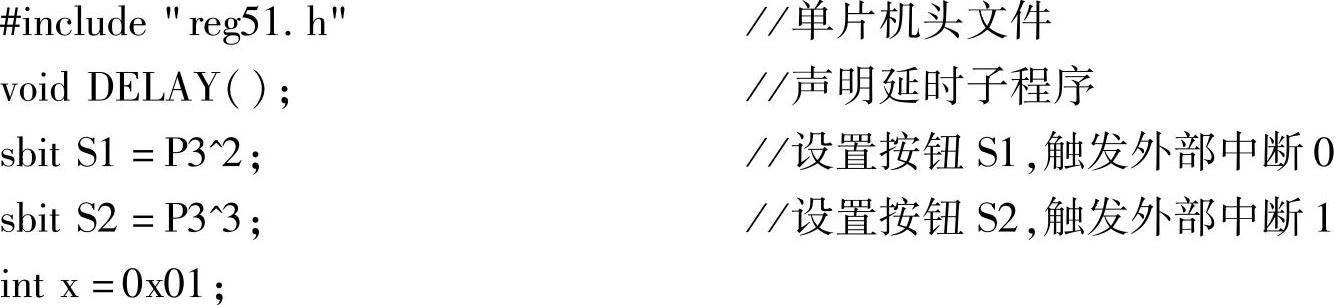
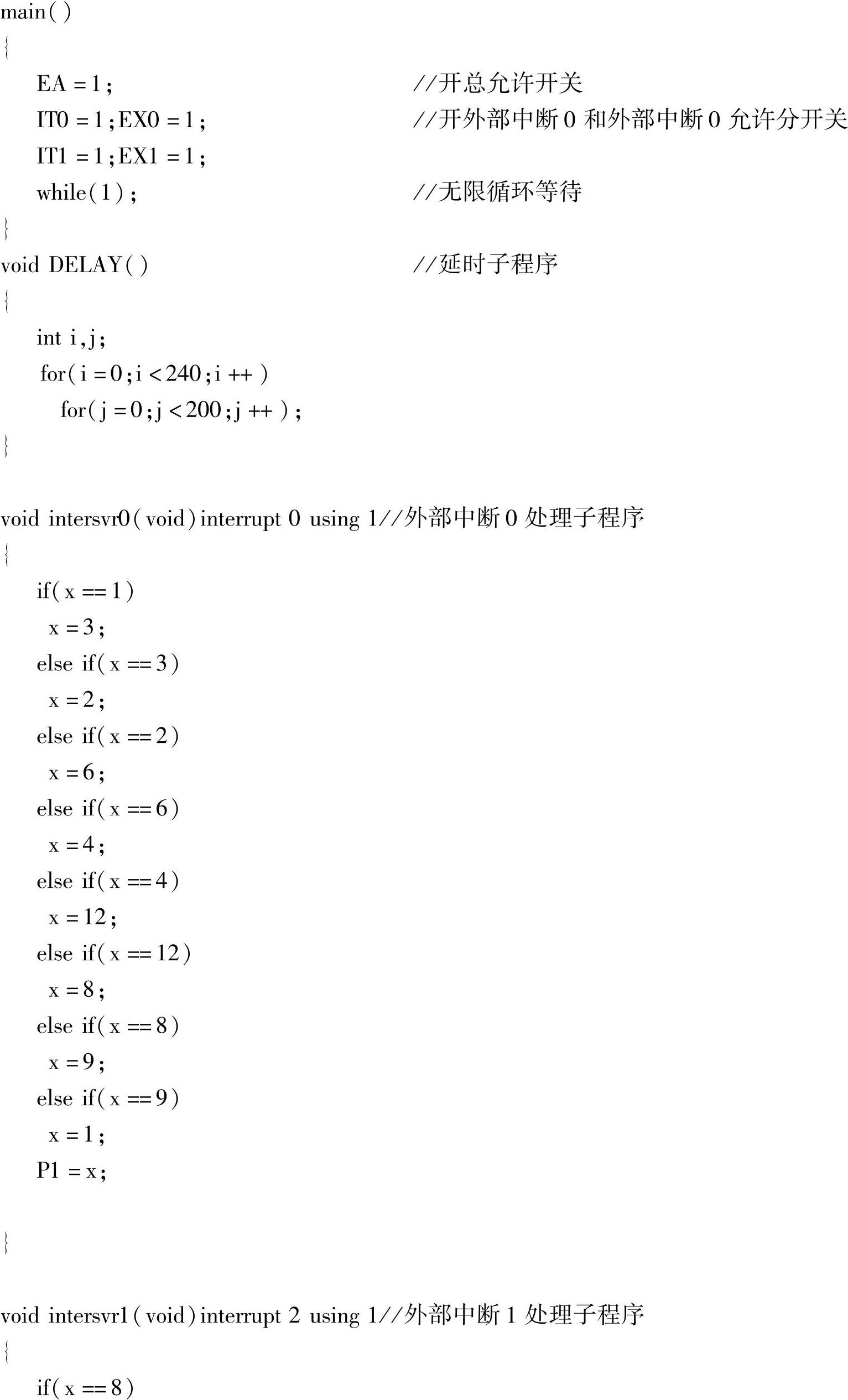
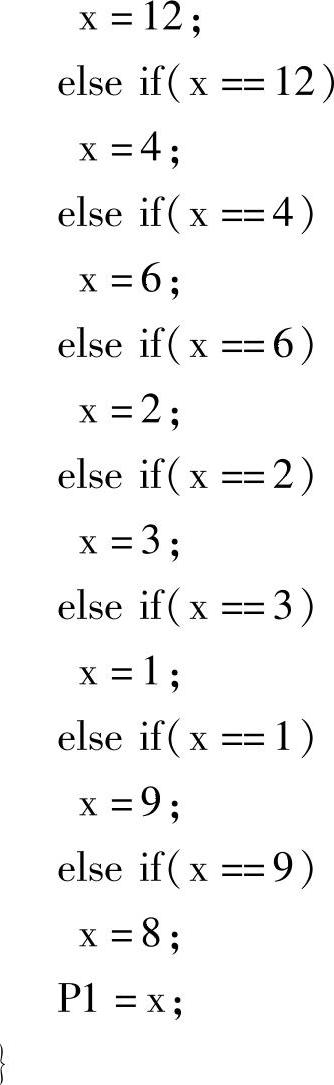
这个程序在P3.2和P3.3引脚定义了两个按钮,并设置了外部中断0和外部中断1。当按下S1按钮,就触发外部中断0,有外部中断程序处理。外部中断程序首先判断步进电机导通相位,然后给出下一个导通相位值,使步进电动机按逆时针方向转动一步。同理,按下S2按钮,则向顺时针方向转动一步。
由于是四相八拍,走一步就是1/8圈,所以走8步就是1圈,非常准确。完整的电路及仿真如图14-4所示。
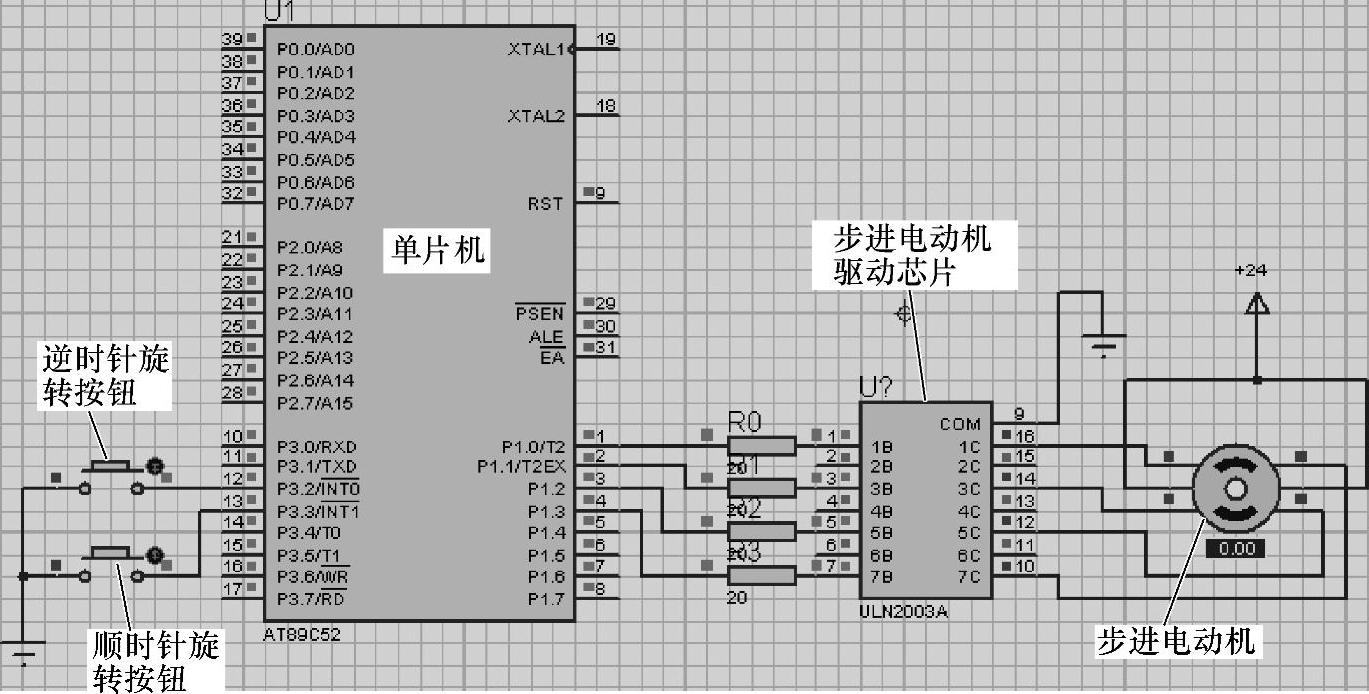
图14-4 步进电动机单步控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。