



与约束方程类似,刚性连接也是一种特殊的约束方程。默认情况下,刚性连接约束了从体的所有自由度。单击菜单Model→Constraints→Rigid Links可以定义刚性连接,选择适当的主体和从体即可完成定义。需要注意的是:主体只能够是点、节点或者节点集。
刚性连接常用来模拟工程中零件之间的焊接、螺栓连接等约束或加筋壳结构(当加强筋选用梁单元定义时)。例如,梁单元与体单元之间的连接就可以选用刚性连接。刚性连接有时可以用来实现模型中的物理条件,例如,对于轧辊、齿轮的平移或旋转分析,使用辅助节点和刚性连接来实现沿轴线平动、转动等运动情况。对于模拟旋转结构的有限元分析,需要采用刚性连接来实现,如图4-31所示的涡轮结构,可以把某点作为主点,该主点可以是体内的点或者体外的离散点(需要为该离散点划分网格,切记!),但一定要位于旋转轴上(如果不在轴线上,则成为偏心旋转),这样结构就可以绕着旋转轴旋转。如果结构主动旋转,可以为该主点施加载荷和约束;如果结构被动旋转(例如,流固耦合问题,流体驱动结构旋转),可以为该主点施加约束,但不要约束绕旋转轴的转动自由度。可以选择面和体作为从体。需要注意的是:约束从体后,后处理中得到的从体的应力场是不准确的,因此定义刚性连接时,应该将不关心的计算区域作为从体。此外,旋转体分析一般都是大位移分析,定义刚性连接时应将Displacements选择为Large;如果不是大位移分析,可以保存默认的设置,详细实例介绍见8.2节“齿轮接触传动分析”。
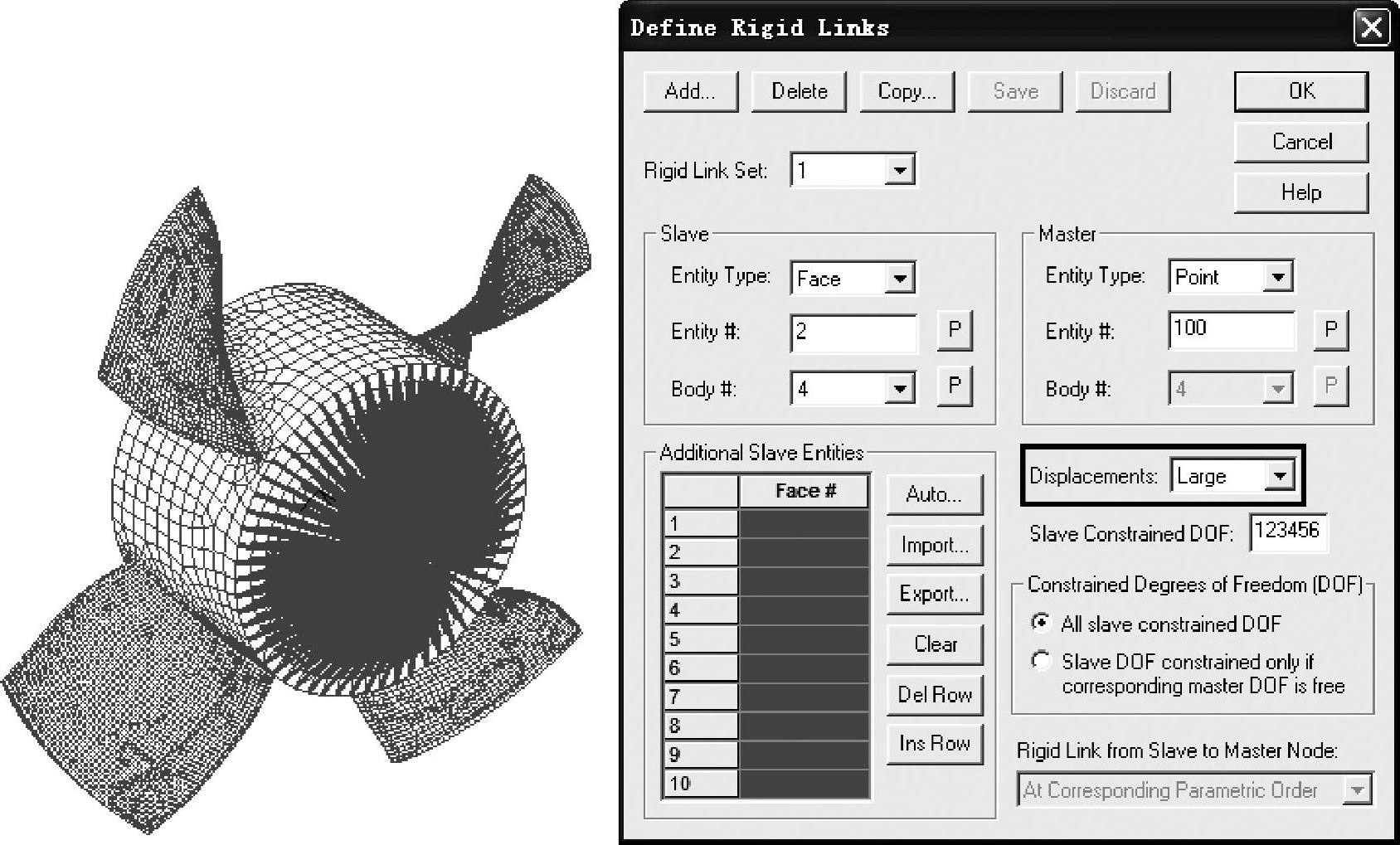
图4-31 采用刚性连接的涡轮结构(https://www.xing528.com)
在ADINA软件中,Rigid Links的另一个重要功能是设置刚体。顾名思义,刚体指的是刚性体、不变形体,即:运动过程中结构不会发生形变。对于刚体而言,无论是平动还是转动,体内任意一点的运动都相同。刚体的运动可以看做是平动和转动的复合运动。
ADINA软件中使用Rigid Links来定义刚体,即:把整个体的自由度缩聚到一点,该点就是Rigid Links中的主点。换句话说,整个体的运动情况与主点的运动情况完全相同。对于二维模型,如果Rigid Links的从体类型(Slave Entity Type)选择为面(Surface或者Face),该面等同于刚性面,原因是整个面的自由度都缩聚到主点上;对于三维模型,如果Rigid Links的从体类型(Slave Entity Type)选择为体(Volume或者Body),则该体等同于刚体,原因是整个体的自由度都缩聚到主点上。
需要注意的是:使用Rigid Links后,约束只能够施加在主点上,不能够为从体再设定任何约束。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。