



在测量领域中,利用光使微小位移测量装置具有耐噪声及高准确度化,并引入半导体激光器,使其装置小型化。在光学装置的构成中,整体光学零部件(个别光学零部件)的三维装配调整(调芯)是必须要做的。为了进一步小型化而使个别部件做得很小,但装配调整起来困难。就目前的构成法而言,小型化与低成本化是有极限的。对光学测量装置而言,利用微机械加工技术是很合适的。这是因为利用适合光刻技术的微机械加工技术,不需要整体零部件(个别零部件)的调整等麻烦的作业。表6-8所示为主要的微小位移测量装置的分类。
表6-8 微小位移测量装置分类
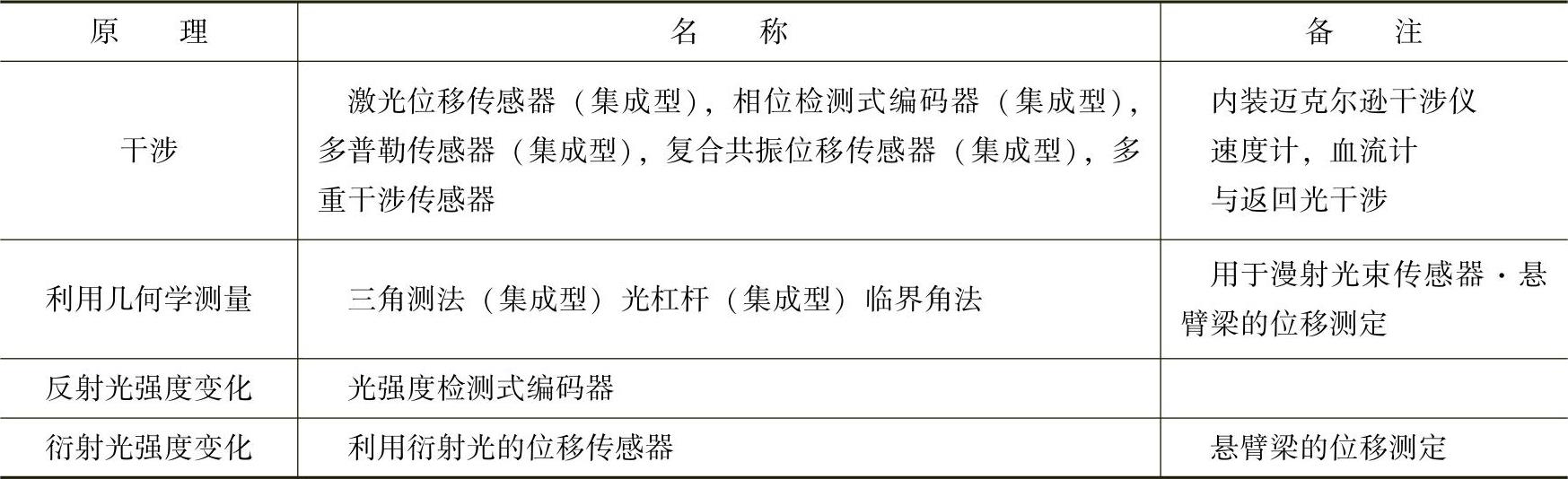
典型的光学式位移计量装置中,有测定反射镜相对移动量的包含迈克尔逊干涉系统的激光测微仪和测定刻度之间的相对位移的编码器。激光测微仪以光的波长为基准,而编码器以刻度尺的刻度为基准。编码器容易达到小型化,这是由于它不需要高准确度地控制(依赖于激光元件的温度和电流等)激光波长所需要的多余的元件和装置的缘故。由于刻度盘的热容量大,因此不易受到短时间温度变化的影响。对于利用透过两块狭缝板(主刻度盘与指示刻度盘)的光强度变化的方法,为了提高分辨率、缩小狭缝节距,会产生由于光的衍射而使有效光量减少的问题。另外,检测信号不是完整的正弦波,而是包含噪声的近似正弦波形。因此,目前正在开发在刻度盘的刻度上采用相位光栅,积极利用衍射光干涉的高分辨率编码器。其分辨率接近大型激光干涉测距仪。
按照原理,编码器可分为两大类,即检测外部刻度盘反射率高低所形成的周期性线条的方式和检测衍射光栅刻度盘衍射的光相位的方式。前者结构简单,而后者需要激光器等相干光源。但准确度高一个数量级是后者的优点。今后希望利用微机械加工技术制造出能够测定绝对旋转角度的超小型微编码器。
1.单片型微编码器
开发出与以往的尺寸比为1/100的超小型且高分辨率测定位移的微型编码器。刻度盘采用了衍射光栅。编码器由在GaAs衬底上单片成形的半导体激光器与复合光敏二极管及具有全反射镜的氟化聚酰亚胺光波导构成。半导体激光器的出射端面由干蚀刻形成。编码器芯片的每边长为1mm以下。利用从半导体激光器的两端面出射的两个相干光束而不需要以往的光束分离器。节距为p的周期性衍射光栅(刻度板)上以波长λ的光以入射角θi入射时,入射角θi与衍射角θm之间有如下关系:

式中,m表示衍射级次,m=0,±1,±2,…。
对刻度板出射的光束角度以激光波长λ(为0.85μm)与刻度板的衍射光栅节距p的关系θi=arcsin(λ/p)来表示。光敏二极管与半导体激光器是同时成形的,因此基本是相同结构。结果,去掉一切以往的单个光学零件,可在直径为2in(50.8mm)的衬底上一次成形4000个微编码器芯片。光敏二极管的信号IA、IB有90°的相位差,因此得到接近圆形的李沙育曲线。一周相当于半个节距(0.8μm)。进一步进行相位分割,则能得到数十纳米级的分辨率。
2.利用面发光激光器(VCSEL)的编码器
利用面发光激光器的集成化制造出检测反射光强度的编码器。它安装在外形为3mm见方的薄膜衬底上、在具有一定节距p的高低反射率线条的反复图样所组成的刻度板上,斜对着面发光激光器,从其激光器的出射口反射光束。用一次成形的硅光敏二极管检测反射光。当移动刻度板时,能得到与节距p具有相同周期的近似正弦波的信号。为得到方向检测所必需的相差90°相位的信号,在刻度板节距方向上以(m+1/4)p的间隔配置两束光线(m为整数)。用于制造编码器的光束出射口的直径为30μm,阈值电流为14mA,光束输出功率为0.3mW/束。试制刻度板的高低反射图样节距有20μm、30μm、60μm三种,分别得到0.1μm、0.2μm、0.3μm的最高分辨率。
其检测原理是以检测反射光强弱为基础的,并没有有效利用激光的相干性,却充分利用了面发光激光器光束扩散小、能够二维地配置光束出射口等特点。
3.利用光栅影像的集成型编码器
传感器部分是由硅微细加工制成的。利用光栅影像的编码器,使用3块光栅。从光源射出的不相干光,通过指示光栅后成为光栅状的发光图样。第二光栅为刻度光栅,它具有衍射并将指示光栅的像以特定条件成像的作用。所形成的像,在此时是光栅像,因此得到的是高对比度的条纹图样。当刻度光栅为反射光栅时,照射光被反射,光栅像形成在传感器的指示光栅面上,从而在出射光的指示光栅面上形成条纹状光强度分布。用硅的穿透蚀刻形成指示光栅,光从光栅的狭缝部分射出,经刻度光栅反射后返回的光,用指示光栅上形成的光敏二极管测定。因此指示光栅起到产生光栅状光分布的作用及测定光栅状光量的光检测器作用。对传感器部分的集成化,光栅以硅的深沟槽蚀刻形成。以GaAs为光源的面发光二极管配置在硅光栅的后方。在发光二极管上连接配线,固定用托架也是用硅做成的,在其后面安装信号处理用集成电路。集成电路也可以最上部光栅面与光栅相邻的形式制造。
传感器的光栅照片采用硅衬底贯穿蚀刻的方法形成光栅。光栅周期为80μm,光栅为半透明的,因此里面的文字也能透视。从光栅的放大照片中可以看出,每个硅光栅里形成两个线状光敏二极管。由该编码器得到周期为40μm的正弦波信号,从而得到光栅影像编码器特有的不受间隙变化影响的信号,信号对比度在间隙扩大到20mm也保持不变。
4.混合型微编码器
混合型微编码器是将波导、电极和焊锡等在预先制成的热氧化硅衬底上,用高准确度的焊接连接安装半导体激光器芯片和光敏二极管芯片的。它能够采用高寿命的、波长为1.55μm的半导体激光器芯片,因此能实现高可靠性。其基本原理及结构与单片型微编码器相同。编码器芯片的尺寸比单片型微编码器大,但也只有2.3mm×1.7mm。芯片虽小,但与刻度板的间隙大,有750μm。刻度节距采用3.2μm时,得到的李沙育曲线的周长为节距的1/2,即1.6μm。
波导厚度由焊接电极时半导体激光器活性层高度与波导芯中心来决定。波导芯厚度为5μm,半导体激光器的活性层厚度为亚微米级,因此在高度方向的定位余量是充分的。焊接时在安装半导体激光器和光敏二极管的硅衬底上预先形成多个标记,当标记的中心对齐后进行加热。两者的标记通过外部可见光是看不见的,因此利用透过元件的红外线检测。
集成型微编码器的波导是由氟化聚酰亚胺的外包层、芯部、内包层这3层构成的平板结构。芯部厚度为3~8μm,宽度为数百微米,与波导宽度相同。由于必须经波导内的全反射镜反射两次后从波导端面出射,因此从半导体激光器两端面出射的两束光线必须平行地在两个波导中心部位入射。在这里,波导与半导体激光器的平行度是重要的。
编码器必须内装在促动器和可动结构的装置中才有价值。因此小型化是其重要性能之一。若可小型化,则微型结构体,例如与带平衡锤悬臂梁的结合体也容易实现,同时也可以由两者的结合体产生新的应用。目前,正进行将测定微机械加工技术制造的带平衡锤的可动载物台位移的方法应用于微型加速度传感器中的研究。
5.超高准确度微编码器
利用一次衍射光干涉原理的编码器中,对应于光栅刻度板的一个节距的移动,干涉强度变化两个周期。为进一步提高分辨率,可采用下列方法:
1)缩小刻度板的衍射光栅节距;
2)用刻度板的衍射光栅多次衍射;
3)利用高次衍射光。
缩短衍射光栅节距时,由一次衍射光的条件,可以得出衍射光栅的节距为λ/2以上。因此只有采用波长短的光源,才能缩短衍射光栅节距。在这里讲述利用三次衍射光的超高分辨率微编码器。
高级次衍射光干涉方式的微型编码器,是在上述微编码器基础上再加一个衍射光栅芯片的结构。从分布式反馈半导体激光器的两端面出射的光在聚酰亚胺光波导中传播。中途由于经光程变换用内部反射镜而使其光程弯曲。当照射刻度板的入射角为36.3°时,得到从刻度板以59.4°出射的±3次衍射光。该±3次衍射光入射到光束合成用微型衍射光栅上(p=1.8μm),其中±1次衍射光从微型衍射光栅垂直出射,并在同轴上干涉,而后在PD(投影显示器)上被检测到。另外,3次衍射光以外的衍射光返回分布式反馈半导体激光器中,该返回光引起的噪声使半导体激光器的振荡不稳定。
6.干涉型位移传感器、利用塞纳克效应的角度传感器(https://www.xing528.com)
迈克尔逊干涉仪的集成型微激光位移传感器是在微集成型激光编码器的聚酰亚胺光波导中新增加由标准具构成两个半透镜的成形工序来制成的。期待着它以10nm级的测量准确度测定外部反射镜的移动距离。传感器尺寸小,只有2mm×1.6mm,因此传感器本身可装入高速运动的微机电系统中。
从半导体激光器出射的光,在氟化聚酰亚胺光波导中传播。由于在光波导中途制成抛物面形状内部反射镜,因此光沿着水平方向被对准。测定其半功率全幅为0.44°的扩散角。半导体激光器通常是以TE偏振光来振荡。当TE偏振光分量透过偏振光束分离器,则在波阻片(λ/4片)上变换成圆偏振光。圆偏振光束的一部分在光束分离器上反射,而剩余分量向外部测定对象反射镜出射,并在外部反射镜上反射后返回光束分离器。
在该干涉仪中,光束分离器的反射光(参考光)与外部反射镜的反射光(测定光)是在同轴上传播(共光路)的,因此在共同部分上即使有折射率等的变化也不会产生相位差,不易受环境变化的影响。这种干涉仪称为斐索干涉仪。当移动外部反射镜,则得到λ/2周期的干涉信号,能够得到约为0.3nm的非常高的分辨率。另外,利用萨格纳克效应(Sagnac effect,旋转的光学封闭回路中相反方向传播的干涉光,在旋转一周时的时间差正比于旋转角速度)的微角速度传感器(陀螺)也已开发出来。但是,由于最小检测角度正比于其光学封闭回路的面积,因此,对微型化是不利的。
7.高灵敏度干涉仪
利用小角度多重干涉效应,可制成超高灵敏度位移测定传感器。其光学系统的结构很简单。从两个平行反射镜上很小的角度入射激光,因为在反射镜面上多次反射的光重合,因此由这些重合在波导方向与横向形成复杂周期结构的某种场。出口处多重光束干涉波形的周期比半波长光产生的干涉波形周期小。多重干涉形成的场作为保留的模式场而被滤出。各模式和其他所有模式进行干涉,对贯穿波导的光进行调制,从而能够对波导的镜间距离进行高灵敏度的测定。通常干涉时的干涉条纹是波长周期的1/2,但该干涉仪中观测到的干涉条纹的周期T由下式表示:

在实验中,检测出该干涉仪中入射波长约为1/9周期的信号。反射镜光线每次被曲折时,这相当于在同方向的另一位置入射光,从而在波导的入口,如同很多排列的衍射光栅的光学系统后面发生类似干涉场一样的光分布,在出口的一点上观测的情况类似。
8.利用复合共振的位移传感器
将半导体激光器装入光学系统时,常常需要注意的是如何避免其所产生的返回光的影响。这是由于半导体激光器对返回光作用非常弱的缘故。基于复合共振的位移传感器是积极利用易受影响的返回光的传感器。它是能实现高灵敏度的超小型光传感器。换言之,有返回光时,相当于具有两个普通反射面的半导体激光器上,再在外部半导体激光器的单反射面附近具有另一个反射面的情况。
这就意味着复合共振型半导体激光器的阈值电流和微分量子效率(I-L曲线的斜率)是由外部反射镜的距离及其反射率确定的。总之,利用复合共振时微小的半导体激光器靠近试样,把反射光重新入射的方法可测定试样的位移量和反射率。这类传感器是最终的小型传感器,若作为位移传感器使用时,对半波长以上的位移,有判断不出方向的致命缺点。作为半波长范围的位移测定和伺服机构的反馈用传感器是有效的。根据复合谐振激光器(CCL)的复合共振型位移传感器与探针及促动器组合后构成伺服机构,扫描探针显微镜(SPM)拍摄的图像。从它所再现的光盘的跟踪槽即可看出其高分辨率。可以认为复合共振型位移传感器是抑制出射光束扩散的激光器。因此半导体激光器的出射端附近在厚度方向上具有分布折射率的厚膜透镜以单片型形成的激光器,也称为复合共振型位移传感器。这类位移传感器,若能够容易地检测其位移方向,那么它的应用将是很广泛的。
9.利用可动衍射光栅的位移传感器
在前面有关加速度传感器的叙述中,也提到过利用可动衍射光栅可进一步提高分辨率。利用由固定梳状与可动梳状构成的衍射光栅,能够高准确度地测定可动部分的位移。
10.基于几何学配置的微小位移传感器
以三角测法、射束偏转法(OBDM)、光杠杆、光截断法等几何学配置为基础的测定方法,具有不需要参考光,且以简单结构得到高灵敏度的优点。简单的结构使显著的微小化成为可能。OBDM是非常简单且高准确度的。它作为光敏感元件和跟踪误差信号的检测方法以及在原子力显微镜(AFM)的悬臂振幅的测定中也能使用。由检测斜射光束的反射光方向而高准确度地测定其光束反射位置的相对位移或角度。检测反射光方向的方法主要有下列3种:
1)利用复合光敏二极管检测法;
2)利用位置敏感探测器(PSD)检测法;
3)刀口法。
刀口法是阻挡光束斑点的1/2,因此基本上与利用复合光敏二极管的检测等价。比较利用复合光敏二极管与PSD的检测法中得出的结果,两者灵敏度及最小分辨率(MDA)在使用PSD时为

使用复合光敏二极管时为

比较两者,则得到PSD的最小分裂率比复合光敏二极管小1/2π左右的结果。但实际的问题是,检测面积比光束斑点要大,因此灵敏度下降,所以两者的灵敏度可认为几乎相等。采用凸面反射镜时灵敏度可提高∂θ′/∂θ。
11.由三角测法及射束偏转法测定
两种方法皆以在目标的反射及位置的检测所需反射光对复合光敏二极管的投射为依据的。目标的位移ΔZ或者旋转角度Δθ分别对应于反射光的位移和偏转。它引起复合光敏二极管上投射激光光斑位置的变化。该激光斑点的位置是根据复合光敏二极管的输出差来算出的。
该传感器只由GaAs衬底上形成的半导体激光器、波导及复合光敏二极管构成,尺寸较小,仅为750μm×800μm。虽然它的结构非常简单,但实验表明能得到4nm以下的高分辨率。若进行最优设计及进一步提高半导体激光器的输出功率,则能够提高分辨率。目标上使用的平坦的反射镜以圆筒反射镜来替代,因此能够高准确度地测定与传感器平行方向的位移。
12.利用漫射光束的位移测量
漫射光型位移传感器是采用使光源的光束以有特定角度扩散的方法制成的。随着远离目标,返回的反射光强度也减弱,因此光束照射的物体的反射光强度随物体的位移而变化。利用这一现象测定光照射方向的位移。该测定原理也称为光杠杆(optical lever)。它的优点是原理简单,却能得到高分辨率。在市场上销售的测定器中有亚纳米级分辨率的。它使用光纤探针的场合也很多,此时称为光纤测微计。
对于干涉型位移传感器,在被测物体上安装的反射镜与探针间的光轴若调整得不准确,则不能进行测定,因此存在测定系统的调整比较困难的问题。但漫射光型位移测定具有微小的角度偏差也能进行测定的优点。但是受光强度随被测目标的反射率不同而不同的影响,因此必须对每个目标进行以位移-受光强度特性曲线的极大值点为基准的定标,为了解决此问题,提出了根据探针尖端的内圈与外圈输入的差动测定来消除反射率影响的方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。