



1.转速传感器
转速传感器是各种机械系统最重要的监控参数的传感器,也是物联网中常用的传感器。电磁感应式发电机转速传感器是在永久磁铁的周围绕有线圈,线圈周围是齿轮,当齿轮旋转时,由于齿轮齿峰和齿谷使永久磁铁间的气隙不断发生变化,导致通过线圈的磁力线发生变化,在线圈中就会产生感应电压,并以交流形式输出。
(1)光电式转速传感器
光电式转速传感器工作原理如图6-7所示,这种光电式转速传感器的工作原理是,当遮光板不能遮断光束时,发光二极管的光射到光敏晶体管上,光敏晶体管的集电极中有电流通过,该管导通,这时晶体管也导通,因此在端子上就有5V电压输出。
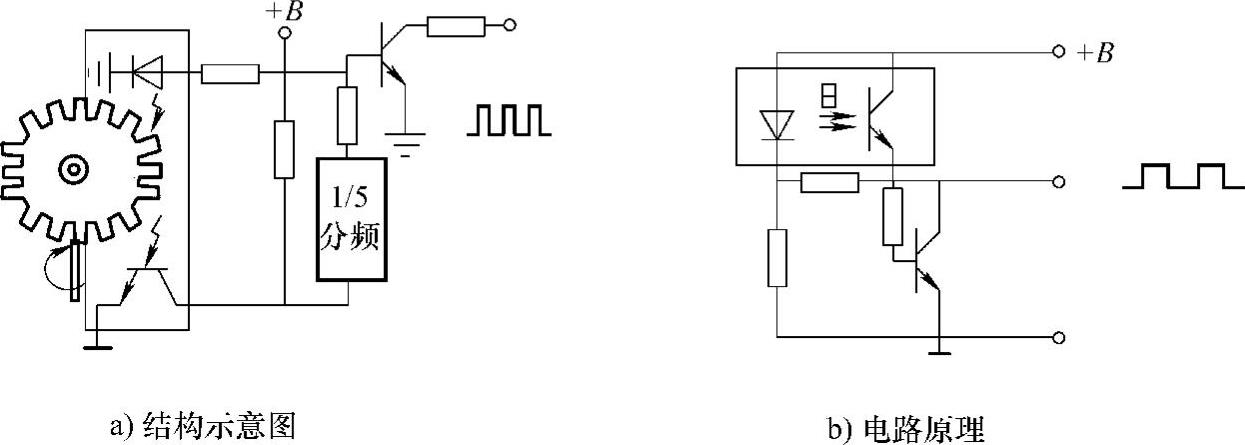
图6-7 光电式转速传感器的工作原理
(2)霍尔式转速传感器
霍尔式转速传感器主要由触发齿轮(与车轮或传动系统旋转元件连在一起)、霍尔元件、永久磁铁和电子线路等组成。永久磁铁的磁力线穿过霍尔元件通向触发齿轮,这时齿轮相当于一个集磁器。图6-8所示为霍尔式转速传感器示意图。在用于齿轮测量中,当霍尔元件通过齿轮的运动变化,输出毫伏级的交变电压波形,经放大器放大为伏级的电压,送施密特触发器输出标准的脉冲信号,并产生一定回差,以提高稳定性,再送输出级放大输出。
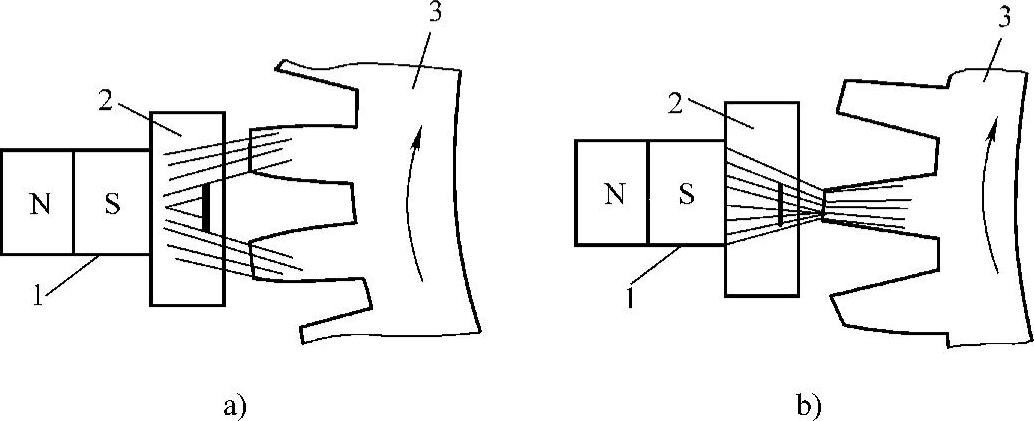
图6-8 霍尔式转速传感器示意图
1—磁体 2—霍尔元件 3—齿圈
霍尔元件主要用于转速传感器,以及用于测量车轮或齿轮传动系统的转速。有时为了适应汽车在各种温度下工作,霍尔式转速传感器的结构采用封闭式,它将齿轮与传感器密封在一起,这样就保证了在恶劣环境中可靠地工作。
2.位移传感器
(1)电致伸缩式位移传感器
电致伸缩式位移传感器是利用陶瓷材料的电致伸缩效应制作的。对于某些晶体,当沿着一定方向受到外力作用时,内部产生极化现象,同时在某两个表面上产生符号相反的电荷,当外力去掉后,又恢复到不带电的状态;当作用力的方向改变时,电荷的极性也随着改变,晶体受力所产生的电荷量与外力的大小成正比。电致伸缩陶瓷微位移传感器适用于激光技术、有源光学和精密机械等领域,如用作闭路自动控制微定位系统。典型的技术性能指标:位移大于20μm;重复误差为0.03μm;推力为200N。
(2)电涡流式位移传感器
电涡流式位移传感器是一种非接触式的位移传感器,通以高频电流的线圈在其端部会产生一个高频电磁场,当线圈靠近金属体时,在其表面便产生以线圈轴心为圆心的环形电流,称为涡流。涡流产生的反磁场抵消原磁场,使传感器线圈和前置器组成的电路参数发生改变,引起输出电量的变化,此变化与金属体和传感器的位移变化成正比。主要的技术指标:工作频率为0~10kHz;工作温度为-30~150℃;线性度为2%FS(满刻度)。
(3)差动变压器式位移传感器
差动变压器式位移传感器是一种变压器型的电感式机电转换元件,将处于交变磁场中的磁心位移,通过可动磁心产生的互感变化转换成与该位移成基本线性函数关系的电信号,根据输出电信号的大小和极性,相应地计量位移或其他机械量的大小和方向。它可用于远距离传输、记录显示和控制。主要技术指标:量程为±1mm;线性度小于0.5%;分辨力大于1μm。(https://www.xing528.com)
3.角位移传感器工作原理
角位移传感器是用电位计式变换器的测量电路,将飞机被测部位的机械角位移转换成电参量。机械角位移使传感器内部的机械结构在电位计上滑动,从而输出相应的电信号,达到测角位移的目的。传感器采用齿轮放大机构,输出信号可用飞机光学示波器或磁带记录器记录显示,亦可与计算机配合使用,直接解算出飞机操作系统的数学方程。传感器采用3个电位计式变换器即可分别提供±5°、±10°、±30°等3个测量范围。其主要技术指标:测量范围为±20°;灵敏度为300mV/(°);工作温度为-40~100℃。
(1)变面积型电容式传感器
其工作原理是通过改变两个极板相互遮盖面积的大小来得到电容变化值。典型结构原理如图6-9所示。
该类传感器的电容值变化范围很大,适用于测量线位移和倾斜角。在实际运用中,还有很多种具有不同特点的结构形式,如差动变面积型电容式传感器,如图6-10所示。
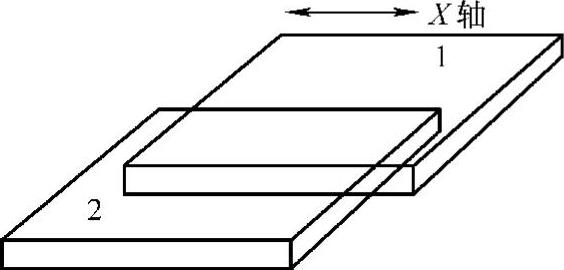
图6-9 变面积型电容式传感器结构
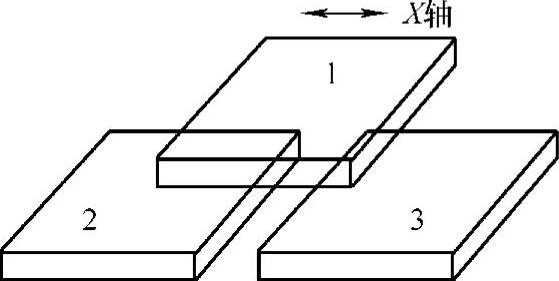
图6-10 差动变面积型电容式传感器结构
对于差动变面积型电容式传感器而言,在动片产生移动时,一个电容值增大,另一个电容值减小,通过差动比较线路,灵敏度可提高一倍。
当传感器有一倾斜角度θ产生时,由于气泡密度小于电解质密度,始终浮在水平位置,致使电极之外电解质覆盖面积减小,同时电极之外电解质覆盖面积增大,两对电极间电容信号产生变化。其电容量为

式中,ε为极板间介质的介电常数;δ为两平行电极间距。
(2)电路设计的基本思想
电路设计的基本思想是保证性能指标的基础上,增强系统的集成度,以提高系统的可靠性和减少体积,具体地讲,传感器电路设计应包括电信号放大和调整模块、信号滤波模块、A-D转换模块、微控制单元(MCU)模块等。传感器(敏感元件)产生的是电容信号,需要经过转换电路转换为电压信号。电压信号经过运算放大和滤波后再转换成为数字信号,传送给MCU进行运算。传感器的电路原理框图如图6-11所示。
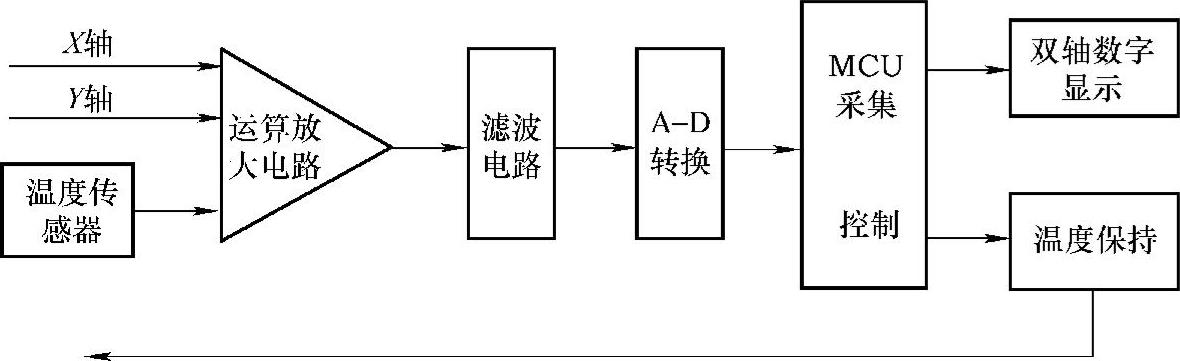
图6-11 传感器的电路原理框图
由于传感器最终显示的为倾斜角度值,所以经过A-D转换的数据必须经过MCU计算,该传感器采用的是最新MSC1210集成数字/模拟混合信号的高性能芯片。MSC1210集成了大量的模拟和数字外围模块,具有很强的数据处理能力,对要求体积小、集成度高、运算速度快和准确测量的产品设计而言,是一个理想的选择。它内部集成了24位分辨力的Σ-ΔA-D转换器、8通道多路开关、模拟输入通道测试电流源、输入缓冲器、可编程增益放大器、温度传感器、内部基准电源、8位微控制器、程序/数据闪速存储器和数据SRAM。这些性能满足了传感器体积小、准确度高、稳定性高的要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。