



在物联网中,物体的搬运是最基本的活动之一,触觉和接近觉传感器是必需的传感器。掌握这类传感器的原理和合理选用是组建相关的系统的重要内容之一。
1.触觉传感器
触觉是指人与对象物体直接接触时所得到的重要感觉功能。触觉传感器是用于机器人中模仿触觉功能的传感器。按功能可分为接触觉传感器、力/力矩觉传感器、压力觉传感器和滑觉传感器等。触觉传感器有微动开关式、导电橡胶式、含碳海绵式、碳素纤维式、气动复位式等类型。
1)微动开关式。它是用于检测物体是否存在的一种最简单的触觉制动器件。基本结构是由弹簧和触头构成。触头接触外界物体后离开基板,造成信号通路断开,从而测到与外界物体的接触。这种微动开关式触觉传感器的优点是使用方便、结构简单,缺点是易产生机械振荡和触头易氧化。当机器人本体撞到障碍物时或者手爪抓到一个物体时,开关就会触发。
2)导电橡胶式。它是在硅橡胶中添加导电颗粒或者由半导体材料构成的。当触头接触外界物体受压后,压迫导电橡胶,利用两个电极接触导通的办法,使它的电阻发生改变,其阻值可以从绝缘状态到几十欧,从而使流经导电橡胶的电流发生变化。这种传感器的优点是具有柔性、价格低廉、使用方便,可用于抓爪表面。缺点是由于导电橡胶的材料配方存在差异,出现的漂移、蠕变和滞后特性也不一致。
3)含碳海绵式。它在基板上装有由海绵构成的弹性体,在海绵中按阵列布以含碳海绵。接触物体受压后,含碳海绵的电阻减小,测量流经含碳海绵电流的大小,可确定受压程度。这种传感器也可用做压力觉传感器。其优点是结构简单、弹性好、使用方便,缺点是碳素分布均匀性直接影响测量结果和受压后恢复能力较差。
4)碳素纤维式。上表层和下表层基板为碳素纤维,中间装以氨基甲酸酯和金属电极。接触外界物体时碳素纤维受压与电极接触导电。碳毡是一种渗碳的纤维材料,具有较强的耐过载能力,柔性好,可装于机械手臂曲面处。其缺点是有迟滞,线性差。将碳毡和碳素纤维夹在金属电极间,从而构成压阻式传感器。
5)气动复位式。它的优点是柔性好、可靠性高,但需要压缩空气源。计算机键盘和质量好的计算器一般都有触觉键,这种键减压时能发出听得见的“咔嗒”声,在许多情况下,“咔嗒”声由薄片金属制成的球形罩发出。当薄片金属球形罩结构在受外力作用时,球形罩对应的部位塌陷,相关的电极接通,借助增压流体或气体源给开关施加背压,也可调整开关的阈值。
2.力/力矩传感器
力/力矩传感器是用于测量机械装置或机器人与外界相互作用力或力矩的传感器。在机械系统或机器人中,它通常装在机器人机械系统的各关节处,用来检测和控制机械系统或机器人臂和手腕的力或力矩。机器人关节运动可以用6个坐标来描述,例如,用表示刚体质心位置的3个直角坐标(x、y、z)和分别绕3个直角坐标轴旋转的角度坐标来描述。可以用多种结构的弹性敏感元件来感知机器人关节所受的6个自由度的力或力矩,再由粘贴其上的应变片将力或力矩的各个分量转换为相应的电信号。图6-2所示为竖梁式六自由度力传感器的原理图。在每根梁的内侧粘贴张力测量应变片,外侧粘贴剪切力测量应变片,从而构成六自由度的力或力矩分量输出。

图6-2 竖梁式六自由度力传感器的原理
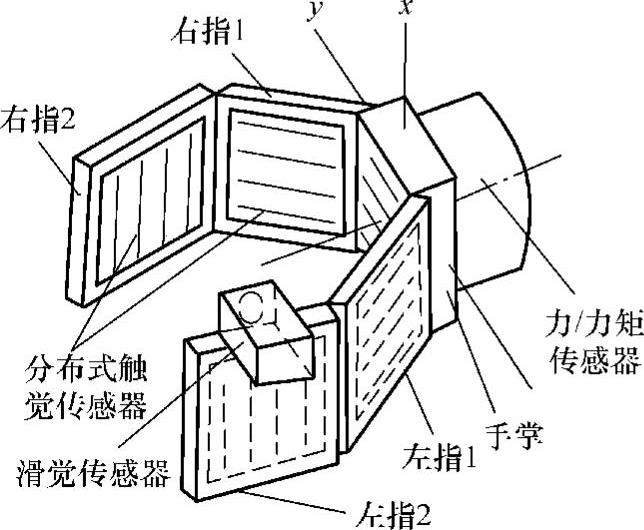
图6-3 机械手示意图
3.压力与滑觉传感器
压力传感器是测量接触外界物体时所受压力及压力分布的传感器。它是识别接触对象的几何形状和硬度的传感器。其原理是,导电橡胶、感应高分子、应变计、光电器件和霍尔元件常被用做敏感元件的阵列单位。以压敏导电橡胶为基本材料的高密度分布式压力传感器,在导电橡胶上面附有柔性保护层,下部装有玻璃纤维保护环和金属电极。在外压力作用下,导电橡胶电阻发生变化,使基底电极电流相应变化,从而检测出与压力成一定关系的电信号及压力分布情况。
滑觉传感器用于判断和测量机器人抓握或搬运物体时物体所产生的滑移。它实际上是一种位移传感器,采用表面包有绝缘材料并构成经纬分布的导电与不导电区的金属球制作而成。当传感器接触物体并产生滑动时,球发生转动,使球面上的导电与不导电区交替接触电极,从而产生通断信号,通过对通断信号的计数和判断可测出滑移的大小和方向。这种传感器的制作工艺要求较高。为了检测滑动,通常采用如下方法:①将滑动转换成滚球的旋转;②用压敏元件和触针,检测滑动的微小振动;③检测出即将发生滑动时,手爪部分的变形和压力,通过手爪载荷检测器检测手爪的压力变化,从而推断出滑动的大小。滑觉传感器是智能机器人手腕握持面内检测握持物体滑动的传感器(见图6-3),它能检测滑动量的大小和方向。
4.接近觉传感器
接近觉传感器是指机器人能感知相距几毫米至几十厘米内对象物或障碍物,以及对象物的表面性质等的传感器,主要感知传感器与对象物之间的接近程度。接近觉是一种粗略的距离感觉,在机器人中,主要用于对物体的抓取和躲避。接近觉传感器一般是非接触式测量元件,仅是感知测试范围是否存在物体,常见的接近觉传感器主要有电磁感应式、光电式、电容式、气动式、超声波式、红外式等类型。
1)电磁感应式接近觉传感器:其组成部分包括放在一简单框架内的永久磁铁以及靠近该磁铁绕制的线圈。当传感器接近一个铁磁体时,将引起永久磁铁磁力线形状发生变化。在静止状态下,没有磁通量的变化,因此线圈中没有感应电流。但当铁磁体靠近或远离磁场时,所引起的磁通量的变化将感应一个电流脉冲,其幅值和形状正比于磁通量的变化率,在线圈的输出端观测到的电压波形可以作为接近觉传感的有效手段。
2)电容式接近觉传感器:对物体的颜色、构造和表面都不敏感,且由于它的检测原理是接近障碍物而引起电容变化,从而得到传感器与障碍物的接近度信息,所以它的实时性较好。在结构上,电容式接近觉传感器由两个极板构成,其中极板1由一固定频率的正弦波电压激励,极板2外接电荷放大器,在传感器两极板和被接近物三者间形成一个交变电场。当靠近被测对象时,极板1、极板2之间的电场受到影响,也可认为是被接近物阻断了极板。
3)气动式接近觉传感器:由一个较细的喷嘴喷出气流,如果喷嘴靠近物体,则内部压力会发生变化,这一变化可用压力计测量出来。这种传感器特点是结构简单,适合于测量微小间隙。
4)超声波接近觉传感器:声波是在空气、水或者固体中传播的机械振动。人耳能听到声音的振动频率范围约在20Hz~20kHz。超声波传感器也称超声波换能器或超声波探头,用来测量物体的距离。它主要是由压电晶片构成的,既可发射超声波,也可接收超声波。通过计算超声波从发射到返回的时间,再乘以超声波在介质中的传播速度,就可以获得物体相对于传感器的距离了,它适用于较长距离和较大物体的探测。超声波传感器原理简单,具有小型化、价格便宜、使用简单、响应快速、灵敏度高、穿透力强、信号处理简单等优点。目前超声波传感器还存在一些问题,如反射、噪声、交叉等需要克服。超声波传感器因为存在测量盲区的问题,测距范围一般在30~300cm之间。
5)红外光接近觉传感器:红外光接近觉传感器是可以在机器人触须或机械爪未触及物体前几毫米到几十厘米内探测物体的传感器。
光电反射红外光接近觉传感器是由光电管接收漫反射回来的调制光,使触须具有自动寻找的功能,以判断前方是否有物体存在。该传感器包括一个可以发射红外光的固态发光二极管和一个用做接收器的固态光敏二极管。由红外发光管发射经过调制的信号,红外光敏管接收目标物反射的红外调制信号,环境红外光干扰的消除由信号调制和专用红外滤光片保证。通过红外光接近觉传感器就可以测出机器人距离目标物体的位置,进而通过其他的信息处理方法也就可以对移动机器人进行导航定位。典型的红外光接近觉传感器工作原理如图6-4所示。
6)光电式接近觉传感器:光电式接近觉传感器是一种比较简单、有效的传感器,可采用开关式或测距方式,把它装在机器人手(或足)上,能够检测机器人手臂(或腿)运动路线上的各种物体。光电式接近觉传感器由用做发射的光源和接收器两部分组成,用波从发射到接收的传播过程中所受到的影响来检测物体的接近程度,接收器能够感知光线的有无,如图6-5所示。
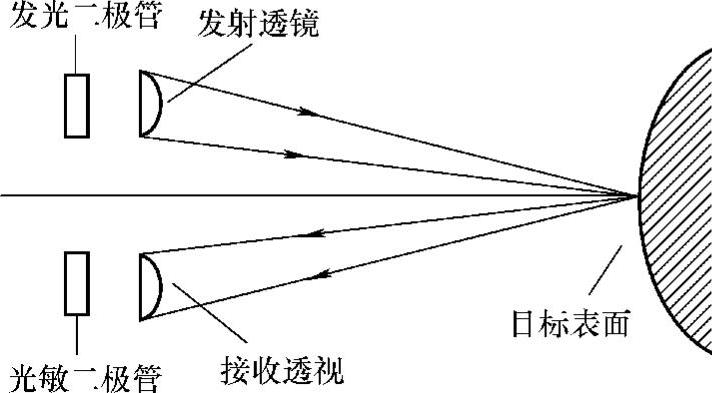
图6-4 红外光接近觉传感器工作原理图(https://www.xing528.com)
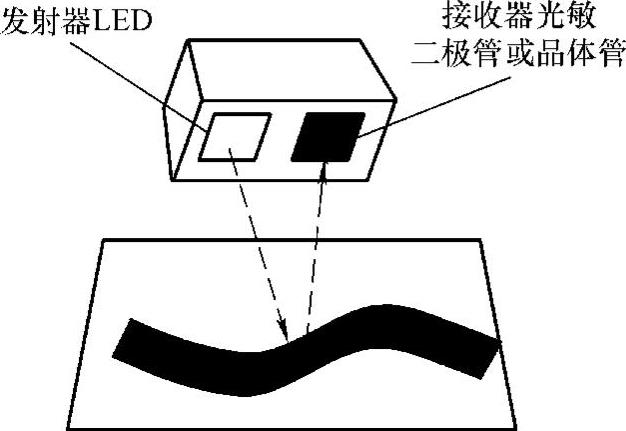
图6-5 光电式接近觉传感器的原理图
接近觉传感器在工业自动化控制、航天、航海、日常生活中都有广泛的应用。在安全防盗方面,如物资、财会、仓库、博物馆等重要场合都装有各式各样的接近觉传感器。在一般的工业生产控制中,大都采用涡流式或电容式接近觉传感器。在环境比较好的场合,多采用光电式接近觉传感器。而在防盗系统中,多采用超声波接近觉传感器。虽然红外光传感器的定位同样具有灵敏度高、结构简单、成本低等优点,但因为它们角度分辨力高,而距离分辨力低,因此在移动机器人中,常用做接近觉传感器,经常被用在多关节机器人避障系统中,用来构成大面积机器人“敏感皮肤”,覆盖在机器人手臂表面,可以检测机器人手臂运行过程中遇到的各种物体探测临近或突发运动障碍。
5.霍尔式与磁阻式传感器
(1)霍尔式传感器
1)霍尔式传感器基本组成。霍尔式传感器包括霍尔元件放大器、温度补偿电路及稳压电源。霍尔元件采用的材料有N型锗(Ge)、锑化铟(InSb)、砷化铟(InAs)、砷化镓(GaAs)及磷砷化铟(InAsP)等。早期的霍尔元件由单晶薄片在两端焊上两根控制电流引线,另两端焊上两根输出引线。它是采用外延及离子注入工艺或采用溅射工艺制造的产品,尺寸小,性能好,并且降低了生产成本。
2)霍尔式传感器的工作原理及主要技术参数。将一块金属或半导体薄片,置于磁感应强度为B的磁场中,如果在它相对的两边通以控制电流I,且磁场方向与电流方向正交,那么在半导体另外两边将产生一个大小与控制电流I和磁感应强度B乘积成正比的电动势UH(V),称之为霍尔电动势或霍尔电压,这一现象称为霍尔电动势或霍尔效应。

式中,RH为霍尔常数;I为控制电流(A);B为磁感应强度(T);d为霍尔元件厚度(m)。
3)霍尔式传感器类型。
①线性型霍尔式传感器:线性型霍尔式传感器的输出电压与外加磁场强度呈线性关系。有单端输出与双端输出(差动输出)两种电路。
②开头型霍尔式传感器:常用的霍尔开关集成电路有UGN-3000系列,其外形与UGN-3501T相同,工作特性有一磁带,使开关动作更可靠。
(2)磁阻式传感器
磁阻式传感器利用的效应主要有:磁电阻效应、巨磁电阻效应、磁阻抗效应、巨磁阻抗效应。
1)磁电阻效应。铁磁物质在磁化过程中电阻发生变化,这种现象称为磁电阻效应。当磁场平行于所测电阻的方向时,电阻随磁场强度的增大而逐渐增加,直至饱和值。这一现象称为纵向磁电阻效应;而当磁场垂直于所测电阻的方向时,电阻随磁场的这种变化一般是相反的,称为横向磁电阻效应。通常所称磁电阻效应指的就是纵向磁电阻效应。
磁敏电阻传感器是基于磁电阻效应制成的一种功能器件,其电阻值直接与磁感应强度有关,因而间接地与电场、磁场和温度有关。在通常情况下,材料的磁致电阻都很小,一般不超过2%~3%。
2)巨磁电阻效应。1986年P.Grunberg等人发现在Fe/Cr/Fe的三明治结构中,Fe层之间可以通过Cr层进行交换作用。当Cr层厚度合适时,Fe层之间存在反铁磁耦合作用。根据这一结果,A-Fert小组的Baibich等人应用分子束外延的方法,在(001)GaAs衬底上生长了Fe/Cr多层膜,结果发现在Cr层厚度为0.9nm的(Fe3nm/Cr0.9nm)60多层膜中,4.2K的温度下,20kOe(1Oe≈79.6A/m)的外磁场可以克服反铁磁层间耦合,使相邻Fe层的磁矩方向平行排列,其磁电阻值可高达82%。由于其磁电阻值远高于一般的磁电阻值,故称为巨磁电阻效应。
1993年Helmolt等人在类钙钛矿结构的La2/3Ba/3MnO3铁磁薄膜中发现室温下50kOe的外磁场的磁电阻效应,磁电阻值达150%。巨磁电阻效应一发现,就受到了应用界的关注。
(3)桥式巨磁电阻传感器的工作原理
巨磁电阻(GMR)传感器是将4个巨磁电阻构成惠斯登电桥结构,该结构可以减少外界环境对传感器输出稳定性的影响,增加传感器的灵敏度。巨磁电阻传感器具有灵敏度高、噪声低、可高温工作(175℃)、响应频谱宽(从直流到几兆赫交流)、稳定性好、抗阻抗应力干扰、体积小(可做成几微米大小)等优点。它可在工业中广泛应用,如在交通控制中检测机动车,通过测量地磁场微扰实现远距离测试军车,通过测量相对地磁场的位置变化作为运动检测器,可进行电流测试、磁场测量(10A/m~10kA/m)、角度测量、位置测量、磁记录等。
1)测量磁场和电流的磁阻抗传感器。磁阻抗传感器能将磁场的大小转变成阻抗的变化,再变成电压的变化。非晶线和丝非常适合用这类传感器,甚至很小的磁场,例如小于0.1kA/m也能引起大的阻抗变化。
2)巨磁阻抗传感器。巨磁阻抗效应与元件的软磁性关系很大,而软磁性受机械应力的影响。有人报道了在CoFeSiB线以及CoFeB线上施加和撤销张应力时引起的正磁致伸缩的样品,在高频下随应力增加,巨磁阻抗被检测到;对负磁致伸缩的样品,随张应力增加,巨磁阻抗最大值减小。事实上,反向各向异性磁场随应力增加而增加,这样,由于磁弹性各向异性场的变化在巨磁阻抗最大值处观察到施加场的移动。这种效应可用来估算磁致伸缩系数λ。

式中,ΔHk是巨磁阻抗最大值时施加的直流磁场强度。
3)医用及生物磁场传感器。人体之中存在着各种形式的机械运动,它们是机体完成各种必要的生理功能的前提和保证,因此检测这些生物的机械运动,无论对基础医学还是对临床医学来讲,都具有十分重要的意义。以前,由于必须利用体积大、功率高、价格贵的超导量子磁强计进行测量,这些机械运动使其医学方面的发展受到限制。高灵敏度及集成化的巨磁电阻(GMR)磁敏传感器的出现为这些机械运动和病变部位的非接触式的探测提供了方便,并推动其发展。下面介绍几种在这方面的特殊应用。生物磁性传感器的原理如图6-6所示,各种各样的细胞、蛋白质、抗体、病原体、病毒、DNA可以用纳米级的小磁性粒子来标记。
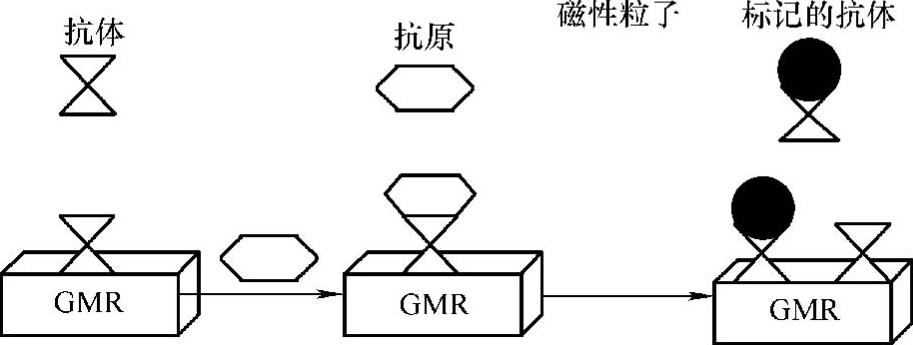
图6-6 生物磁性传感器的应用原理
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。