



【摘要】:图5-1 动作迁移中的关节点对应关系示意图不同拓扑结构角色的动作迁移原理如图5-2所示,在图中的P0P1P2P3是源角色中的关节点,分别对应目标角色中的Q0Q2Q3Q4四个关节点,而Q1Q5两个关节点没有源角色中的关节点进行对应。以图5-2中所表示的动作迁移过程为例,其动作状态同步过程如图5-3所示,首先根据P0P1P2求得P1关节点的旋转角,然后根据此旋转角、Q0Q2的位置和Q2Q3的长度,即可求得Q3的位置。
动作迁移过程中的关节点对应关系如图5-1所示,图中源角色的关节点P0P1P2P3,分别对应至目标角色的关节点P0′P′1P2′P3′。以P2关节点为例,在动作迁移过程中,通过P1P2P3位置计算P2的旋转角,将该旋转角应用到P2′关节点上,通过P1′P2′骨骼段的3D长度,计算关节点P3′的位置,由此可以实现两个角色之间的动作同步。
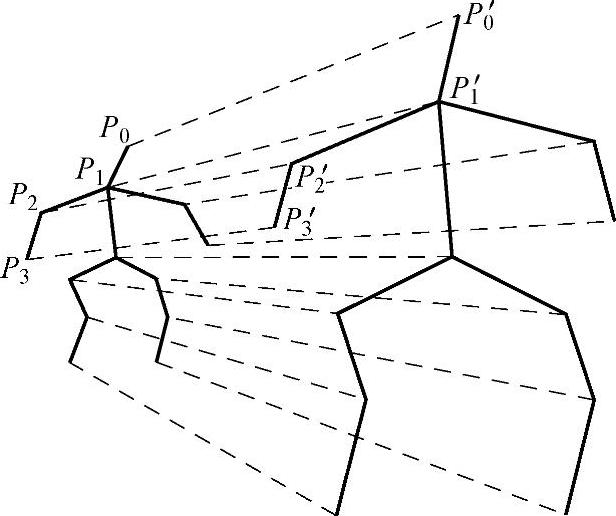
图5-1 动作迁移中的关节点对应关系示意图
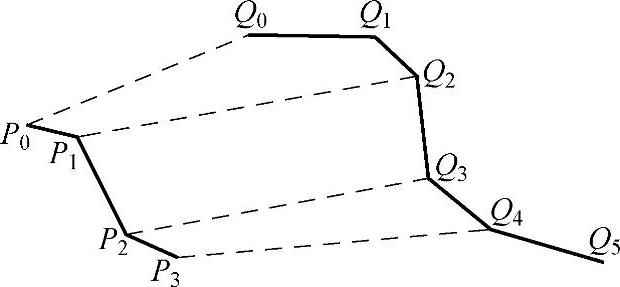
不同拓扑结构角色的动作迁移原理如图5-2所示,在图中的P0P1P2P3是源角色中的关节点,分别对应目标角色中的Q0Q2Q3Q4四个关节点,而Q1Q5两个关节点没有源角色中的关节点进行对应。在这种情况下进行动作迁移时,通过保持Q1和Q5的旋转角不变,而将Q1和Q5的旋转角分别叠加到Q0和Q4的旋转角上,使Q0Q1Q2三个关节点组成一个整体,类似于一条骨骼Q0Q2,而Q5作为Q3Q4的延伸部分,随Q3Q4的动作进行运动。反之,当源角色中存在无对应的关节点时,同样将该关节点的旋转角叠加到前一关节点上,实现拓扑结构的同化。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-2 不同拓扑结构角色的动作迁移示意图
动作迁移主要是将角色动作从源角色变换到目标角色上,使两角色拥有相同的动作状态,该操作可以在拓扑相近或略有不同的骨骼框架之间进行,迁移的源角色和目标角色的关节点基本对应即可。以图5-2中所表示的动作迁移过程为例,其动作状态同步过程如图5-3所示,首先根据P0P1P2求得P1关节点的旋转角,然后根据此旋转角、Q0Q2的位置和Q2Q3的长度,即可求得Q3的位置。
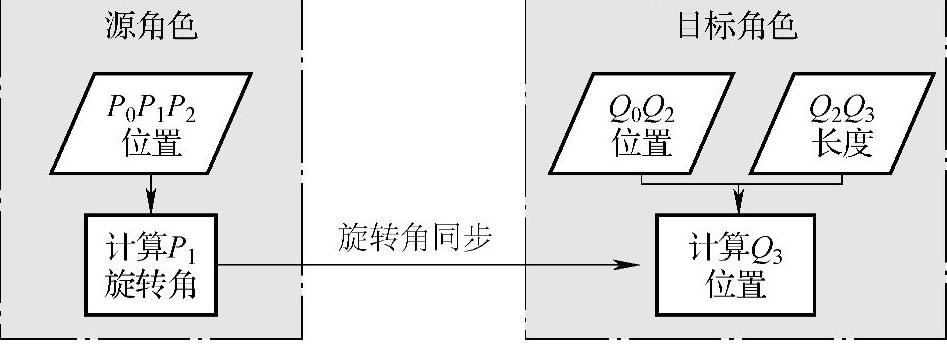
图5-3 动作迁移的旋转角同步示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。