



UG NX 6.0中有三种坐标系:绝对坐标系、工作坐标系和基准坐标系。在使用软件的过程中经常要用到坐标系,下面对这三种坐标系作简单的介绍。
1.绝对坐标系(ACS)
绝对坐标系是原点在(0,0,0)的坐标系,是固定不变的。
2.工作坐标系(WCS)
工作坐标系包括坐标原点和坐标轴,如图3.3.1所示。它的轴通常是正交的(即相互间为直角),并且遵守右手定则。
说明:
●工作坐标系不受修改操作(删除、平移等)的影响,但允许非修改操作,如隐藏和分组。
●UG NX 6.0的部件文件可以包含多个坐标系,但是其中只有一个是WCS。
●用户可以随时挑选一个坐标系作为WCS。系统用XC、YC和ZC表示工作坐标系的坐标。工作坐标系的XC-YC平面称为工作平面。
3.基准坐标系(CSYS)
基准坐标系由单独的可选组件组成,如图3.3.2所示。
●整个CSYS。
●三个基准平面。
●三个基准轴。
●原点。
可在CSYS中选择单个基准平面、基准轴或原点。可隐藏CSYS以及其单个组成部分。(https://www.xing528.com)
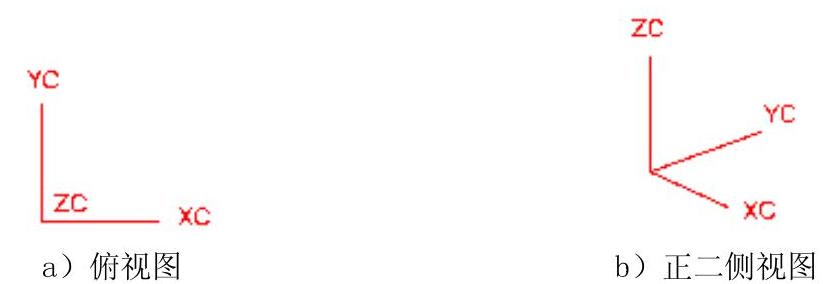
图3.3.1 工作坐标系(WCS)
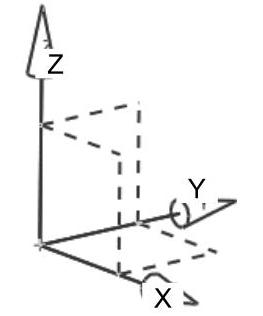
图3.3.2基 准坐标系(CSYS)
4.右手定则
●常规的右手定则。
如果坐标系的原点在右手掌,拇指向上延伸的方向对应于某个坐标轴的方向,则可以利用常规的右手定则确定其他坐标轴的方向。例如,图3.3.3所示,假设拇指指向ZC轴的正方向,食指伸直的方向对应于XC轴的正方向,中指向外延伸的方向则为YC轴的正方向。
●旋转的右手定则。
旋转的右手定则用于将矢量和旋转方向关联起来。
当拇指伸直并且与给定的失量对齐时,则弯曲的其他四指就能确定该矢量关联的旋转方向。反过来,当弯曲手指表示给定的旋转方向时,则伸直的拇指就确定关联的矢量。
例如,图3.3.4所示,如果要确定当前坐标系的旋转反时针方向,那么拇指就应该与ZC轴对齐,并指向其正方向,此时逆时针方向即为四指从XC轴正方向向YC轴正方向旋转。
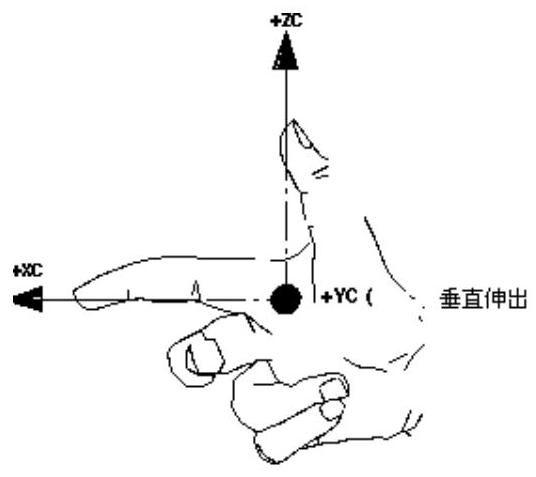
图3.3.3 常规的右手定则
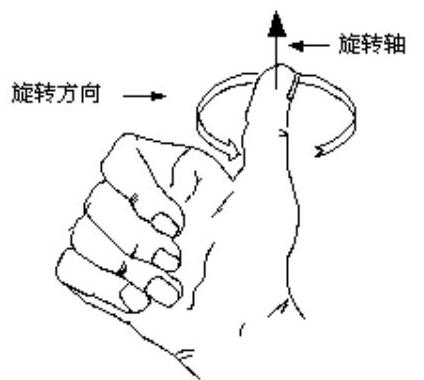
图3.3.4 旋转的右手定则
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。