



1.特性
步进电机是一种将电脉冲转化为角位移的执行机构(见图3-13)。当步进驱动器接收到一个脉冲信号,它就驱动按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。

图3-13 步进电机(得实DS-1000平推打印机)
步进电机能够简单地做到高精度的定位控制。以5相步进电机为例,其定位的基本单位(分辨率)为0.72°(全步级)或0.36°(半步级),这个数值是非常小的;停止定位精度误差基本皆在±3′(±0.05°)以内,且无累计误差,故可达到高精度的定位控制。
步进电机的位置及速度控制方便,在输入脉冲信号时,可以依输入的脉冲数作固定角度的回转进而得到灵活的角度控制(位置控制),并可得到与该脉冲信号周波数(频率)成比例的回转速度。
步进电机具有定位保持力,在停止状态下(保持直流电压,无脉波信号输入时),仍具有励磁保持力,故即使不依靠机械制动,也能做到停止位置的保持。
步进电机动作灵敏,因为加速性能优越,所以可做到瞬时起动、停止、正反转之快速、频繁的定位动作。
步进电机的控制系统构成简单,不需要速度感应器及位置传感器,就能以输入的脉波作速度及位置的控制。也因其属开回路控制,故最适合于在短距离、高频度、高精度之定位控制的场合下使用。
步进电机中低速时具备高转矩,在中低速时具有较大的转矩,故能够较同级伺服电机提供更大的扭力输出。
步进电机与使用离合器、减速机及极限开关等其他装置相比,其故障及误动作少,所以在检查及保养时也较简单容易。
步进电机还有小型、高功率、体积小和扭力大等特性,尽管于狭窄的空间内,仍可顺利安装,并提供高转矩输出。
步进电机和普通电机的区别主要就在于其脉冲驱动的形式,正是这个特点,使步进电机可以和现代的数字控制技术相结合。不过步进电机在控制的精度、速度变化范围、低速性能方面都不如传统的闭环控制的直流伺服电动机。在精度不是需要特别高的场合就可以使用步进电机,步进电机可以发挥其结构简单、可靠性高和成本低的特点。使用恰当时,甚至可以和直流伺服电动机性能相媲美。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
步进电机还有一个技术参数——空载起动频率,即步进电机在空载情况下能够正常起动的脉冲频率,如果脉冲频率高于该值,电机不能正常起动,可能发生丢步或堵转。在有负载的情况下,起动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即起动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
2.种类
现在比较常用的步进电机包括反应式(VR,也称磁阻式或变磁阻式)、永磁式(PM)和混合式(HB)三种。
(1)反应式步进电机
反应式一般为三相,反应式的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
下面以三相反应式步进电机为例讲述其原理(见图3-14和图3-15)。
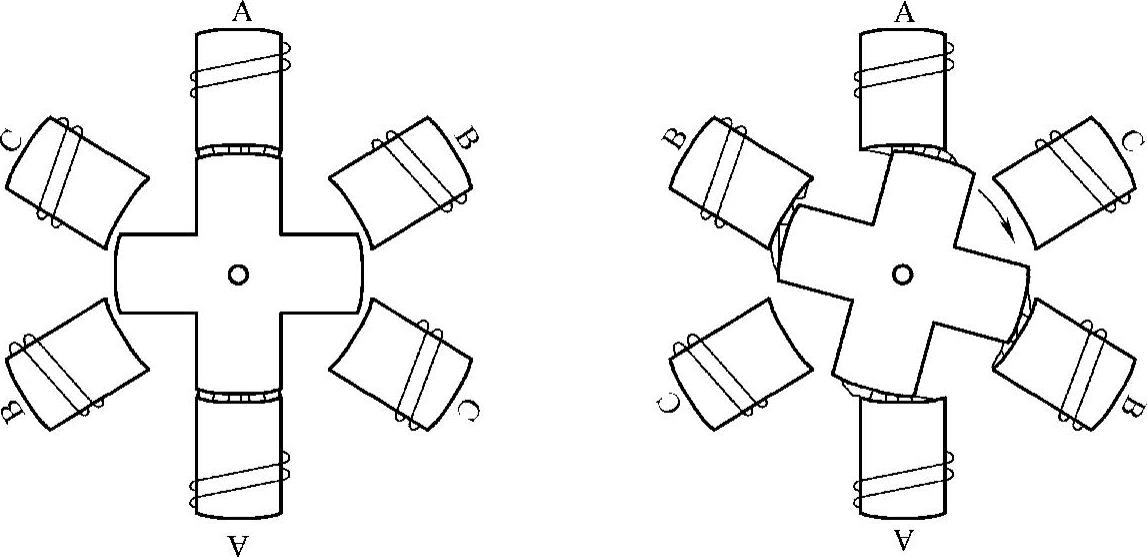
图3-14 三相反应式步进电机基本原理
注:1.定子为3相6极,转子为4极。当仅A相通电时,转子的两个相对的极与A相定子对齐;当仅B相通电时,转子的两个相对的极与B相定子对齐;当仅C相通电时,转子的两个相对的极与C相定子对齐,顺次让ABC三相通电,电机就会转动起来。
2.当AB相通电时,转子转动的角度就会在上述仅A相、B相通电的中间位置,因此当以A-AB-B-BC-C-CA
的循环顺序通电时,电机也会转动起来,而且每步的角度更小。

图3-15 三相反应式步进电机工作原理
注:实际的反应式步进电机把转子和定子都做成有很多个的齿,转子和定子之间的齿并不完全对齐,当仅A相通电时,A相定子的齿是与转子的齿对齐的,但B相的齿却与转子的齿有1/3齿间角的交错,C相的齿却与转子的齿有2/3齿间角的交错;如果仅B相通电,这时B相定子的齿就会与转子的齿对齐;如果ABC三相以上述的次序通电,电机也就会转起来,每步的角度为齿间角,也可两相同时通电,这时就得到1/2的齿间角的步距。
(2)永磁式步进电机
永磁式步进电机包括一个永磁转子、多个线圈绕组和导磁定子。激励一个线圈绕组将产生一个电磁场,分为北极和南极。定子产生的磁场使转子转动到与定子磁场对直。通过改变定子线圈的通电顺序可使电机转子产生连续的旋转运动(见图3-16和图3-17)。
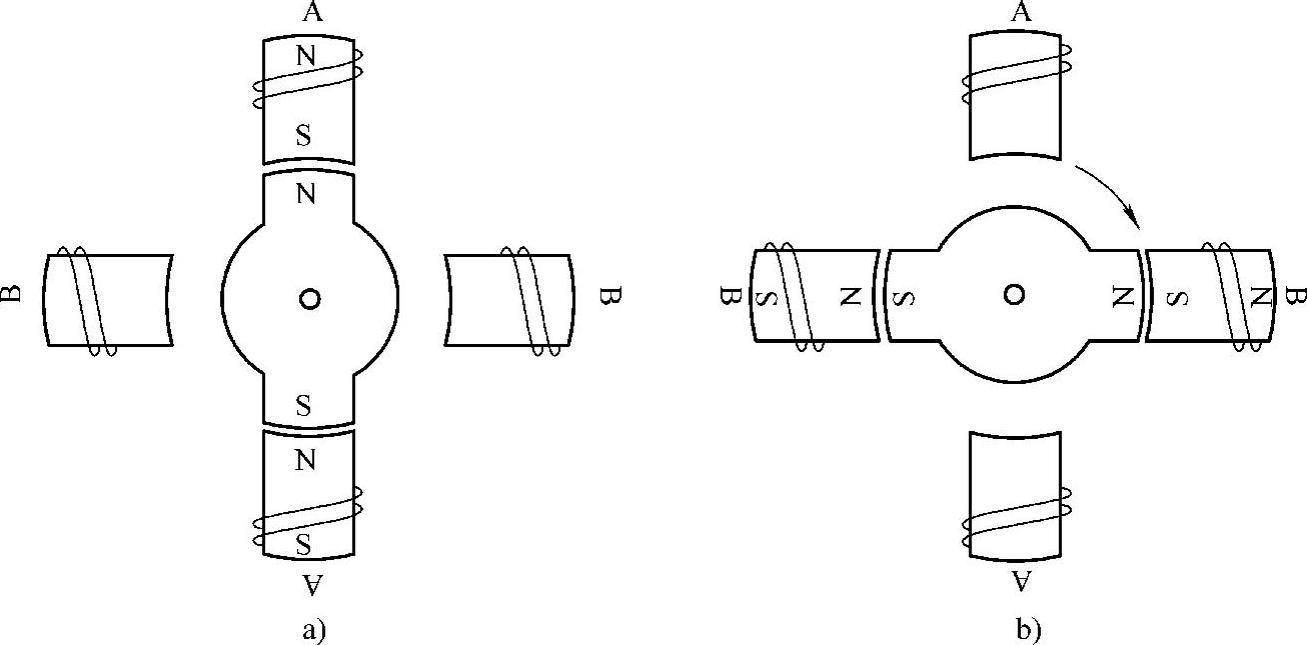
图3-16 单相激励
注:两相电机的典型的步进顺序。在第1步中,两相定子的A相通电,因异性相吸,其磁场将转子固定在特定位置(见a图)。当A相关闭、B相通电时,转子顺时针旋转90°(见b图)。在第3步中,B相关闭、A相通电,但极性与第1步相反,这促使转子再次旋转90°。在第4步中,A相关闭、B相通电,极性与第2步相反。重复该顺序促使转子按90°的步距角顺时针旋转。(https://www.xing528.com)

图3-17 双相激励
注:电机的两相一直通电。但是,一次只能转换一相的极性。
电机也可在转换相位之间插入一个关闭状态而走“半步”。这将步进电机的整个步距角一分为二。在每交换半步的过程中,由于其中一个绕组没有通电,所以作用在转子上的电磁力要小,造成了力矩的净损失。
(3)混合式步进电机
混合式混合了永磁式和反应式的优点。
下面以四相混合式步进电机说明其原理。
混合式步进电机的转子和定子的齿形类似于反应式步进电机,但转子和定子都有两组,每一相铁心分前后两组,绕组则为同一组(见图3-18~图3-20)。
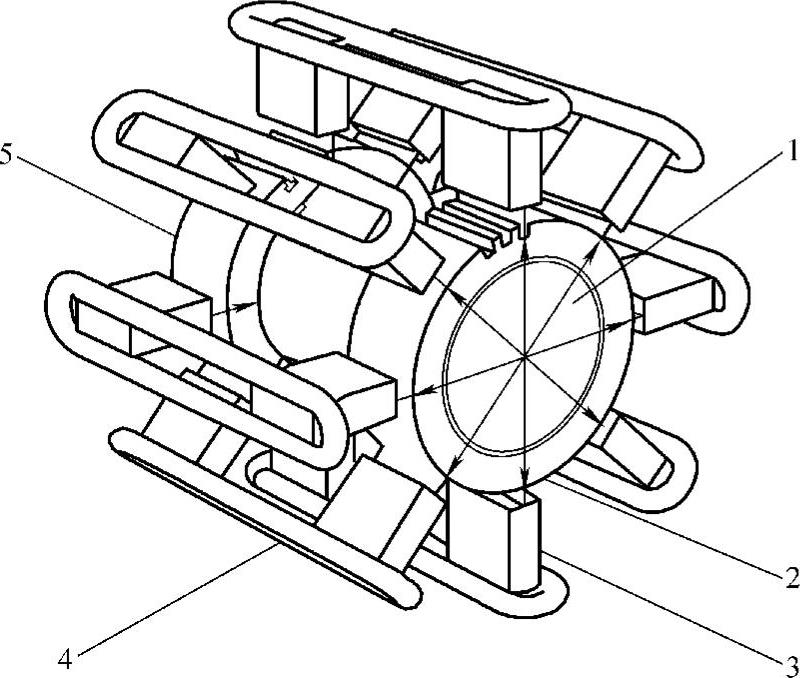
图3-18 混合式步进电机结构
1—磁铁 2—转子前圈 3—铁心 4—绕组 5—转子后圈
注:转子也是分前后两组,分别为前圈和后圈,它们套在一个磁铁外面,磁铁的南北极方向为轴向,形成的磁力线如图3-19所示。

图3-19 磁铁的磁力线
注:前圈和后圈没有对齐,而是交错一个角度,这个角度为半个齿距角,如图3-20所示。
设四个相位为1相、2相、3相、4相,则1相和3相的电路是连在一起而产生的磁场方向相反,2相和4相的电路是连在一起而产生的磁场方向相反,所以一般用(A)/(-A)和(B)/(-B)表示这四个相。
混合式步进电机的工作原理如图3-21和图3-22所示。
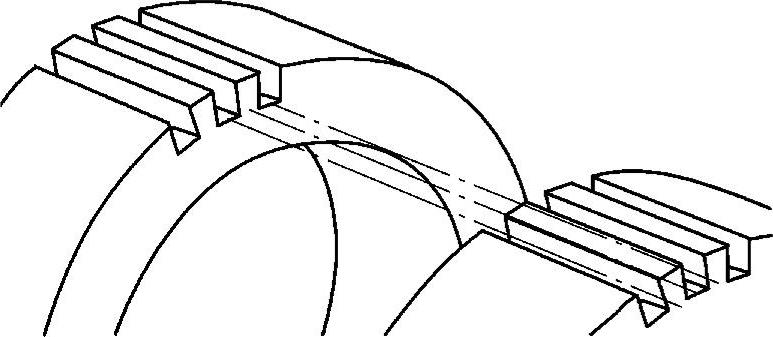
图3-20 转子前圈和转子后圈之间交错半个齿距角
3.参数
1)固有步距角:表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如某型号电机给出的值为0.9°/1.8°(表示半步工作时为0.9°,整步工作时为1.8°),这个步距角可以称之为“电机固有步距角”,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
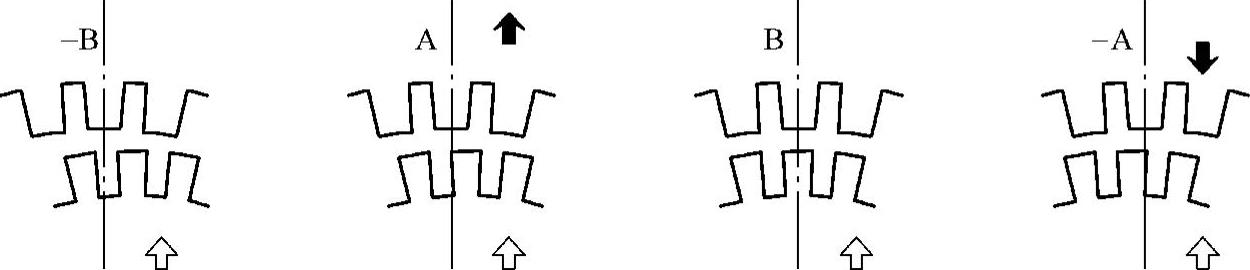
图3-21 转子前圈的齿形对齐情况
2)相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相等。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°,三相的为0.75°/1.5°,五相的为0.36°/0.72°。在没有细分驱动器时,用户主要靠选择不同相数来满足自己步距角的要求。如果使用细分驱动器,用户只需在驱动器上改变细分数,就可以改变步距角。

图3-22 转子后圈的齿形对齐情况
注:1.(A)和(-A)两相通电,对于绕组产生的磁力,转子前圈/(A)和转子前圈/(-A)产生的磁力大小相等、方向相反;对于磁铁产生的磁力,转子后圈/(A)和转子后圈/(-A)产生的磁力大小相等、方向相反。
2.(B)和(-B)两相没有通电,所以仅有磁铁产生的力,转子前圈/(-B)和转子后圈(B)的磁力的大小相等、方向相反,转子将会转动1/4齿距角。
3.当轮流让(A)、(-A)和(B)、(-B)通电,步进电机就会一步一步地转动起来。
3)保持转矩:是指通电但没有转动时,定子锁住转子的力矩。
4)止动扭矩:是指没有通电的情况下,定子锁住转子的力矩。由于反应式的转子不是永磁材料,所以它没有止动扭矩。
5)空载起动频率:即步进电机在空载情况下能够正常起动的脉冲频率。如果脉冲频率高于该值,电机不能正常起动,可能发生丢步或堵转。在有负载的情况下,起动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即起动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。