



摩擦式走纸机构是利用滚轮和纸张之间的静摩擦力驱动纸张走动,摩擦式走纸需要有两套滚轮系统,即上滚轮系和下滚轮系。
滚轮表面可为橡胶或塑料的材质(有时直径较小滚轮就直接整个由单一的橡胶或塑料材质制成),橡胶的摩擦力较大一些,适合驱动较厚和较硬的介质,塑料的摩擦力较小一些,适合驱动较薄和较软的介质。在实际的应用当中,上下滚轮系有时都是塑料滚轮,有时都是橡胶滚轮,更多是一边为塑料滚轮而另一边为橡胶滚轮。具体采用哪种方式,要看打印机最终面向什么样的用户而定,即用户所使用的打印介质(见图2-66)。
实际工作时,滚轮组还需两个位置传感器,分别为进纸(Paper In,PI)传感器和纸尽(Paper End,PE)传感器。进纸时,纸张进入滚轮前,PI传感器感应到,打印机的处理器就会驱动滚轮组转动,把纸张带进去打印机里面。PE传感器感应到纸张时,打印机的处理器会记住这个位置并进行计算,使纸张带进去一定的距离后开始驱动字车和打印头动作并进行打印;当纸张一直进去将要到达底边时,PE传感器将感应到没有纸张,打印机的处理器也会记住这个位置并进行计算,使得打印不会超出纸张的范围;纸张打印完毕之后处理器就会让滚轮把纸张从机器中排出来,并且根据PE传感器的感应状况,在纸张完全退出之后进行下一步的处理(一般是发出声音和闪烁信号灯让使用者知道)。
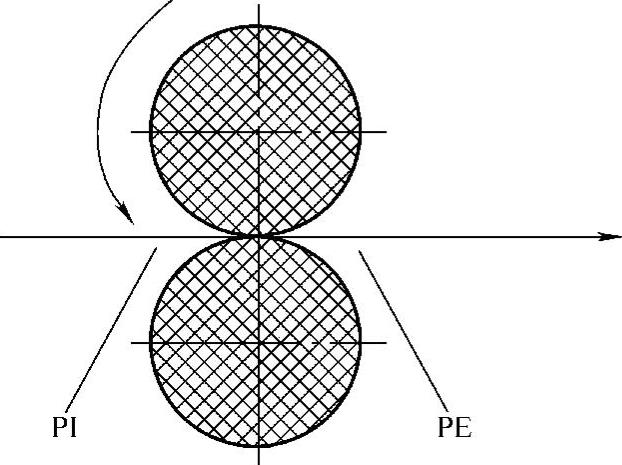
图2-66 摩擦式走纸机构
注:1.滚轮组压紧纸张,当滚轮转动时,在静摩擦力的作用下,会带动纸张作直线运动。
2.PI为进纸(PaperIn)传感器,当纸张放于滚轮前,PI传感器就会感应到,处理器得到信息后会驱动滚轮转动,从而自动将纸张驱动。
3.PE为纸尽(PaperEnd)传感器,纸张边界到达它的位置时,传感器将信息报告处理器,处理器计算其到打印头的距离,若是上边界,则在走动设定的距离后让打印头开始进行打印的工作;若是下边界,则在走动设定的距离后让打印头停止进行打印的工作。
PE传感器在一些型号的打印机中可能会被省略,这时PI传感器会同时担当PE传感器的功能,由于使用者的进纸手法不一,PI传感器兼顾PE传感器会使得对纸边界的感测误差比较大。
1.单侧滚轮式走纸机构
单侧滚轮式走纸机构指只有一组滚轮提供牵引力,另一组滚轮不提供驱动力,仅起压纸的作用,在摩擦力的作用下随纸张的走动而转动(见图2-67和图2-68)。
这种滚轮结构可以应付大部分的摩擦形式的进纸,但对于多层纸,由于可能会造成在不同层的纸之间的摩擦不一定均衡,驱动纸张的力量由主动轮到被动轮方向逐层减小,特别是与被动轮接触的一层纸受到的驱动力最小,每一层之间的纸张有可能会产生错层现象。另外,由于厚纸的重量比较大,这种滚轮对厚纸的牵引也不太理想。
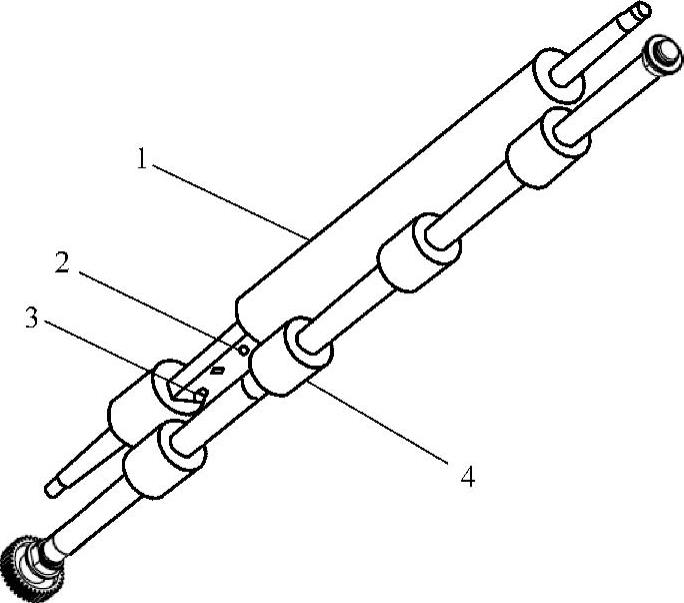
图2-67 单侧滚轮式走纸机构
1—上滚轮 2—进纸(PI)传感器 3—纸尽/页首(PE)传感器 4—下滚轮
注:滚轮组利用一条较粗的硬轴连接,所有滚轮同轴线,上滚轮轴和下滚轮轴其中一条为半浮动,受弹簧的压力,使进纸滚轮能有较大的带动力。
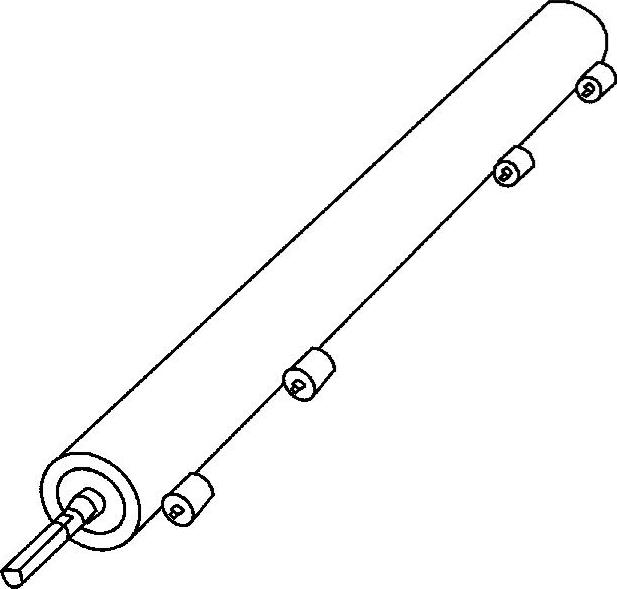
图2-68 滚筒式打印机的卷筒滚轮机构
注:滚筒式打印机的卷筒滚轮机构也可以看作单侧滚轮结构(仅滚筒有动力,小滚轮作随动转动)。
2.同轴双组滚轮式走纸机构
同轴双组滚轮式走纸机构的滚轮组,无论是上滚轮组还是下滚轮组,其各自的所有滚轮在滚动时,其轴心全部处于一条直线上。
这种走纸机构指两组滚轮都能提供牵引力,为了使两组滚轮都能输出驱动力,一般在两组间通过齿轮啮合来同时取得动力(见图2-69)。
这种滚轮结构改善了上述结构多层纸或厚纸的牵引不太理想的状况,但对于中间的几个滚轮,由于处于弯曲梁中间的缘故,中间的滚轮能提供的压力较小从而导致其摩擦力会比两边的滚轮小,造成边缘处滚轮的驱动力较大而中间滚轮的驱动力较小,即整体的进纸力不均衡。
3.柔轴双组滚轮式走纸机构
柔轴双组滚轮式走纸机构的滚轮组,与同轴双组滚轮式走纸机构的基本相同,所不同的是,有一组(一般为上滚轮组)的每个单独滚轮,可以各自有轻微的升降,配合不同的压力,适应不同厚度的进纸(见图2-70)。
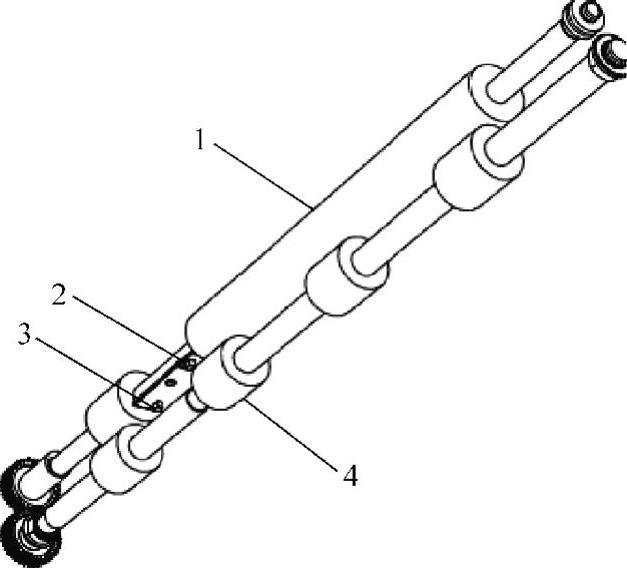
图2-69 同轴双组滚轮式走纸机构(https://www.xing528.com)
1—上滚轮 2—进纸(PI)传感器 3—纸尽/页首(PE)传感器 4—下滚轮
注:滚轮组利用一条较粗的硬轴连接,所有滚轮同轴线,上滚轮轴和下滚轮轴中,其中一条为半浮动,受弹簧的压力,使进纸能有较大的带动力。
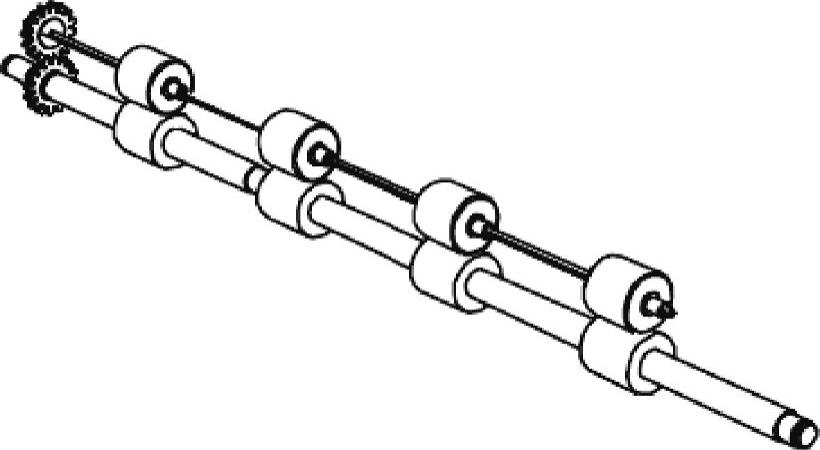
图2-70 柔轴双组滚轮式走纸机构
注:上滚轮组半浮动,各滚轮之间利用一条较细的钢丝软轴连接,每个滚轮都可以上下移动,每个滚轮独立受弹簧的压力,产生进纸的带动力。
这种机构由于每个滚轮都可以单独承受不同的弹簧压力,因此可以把进纸力调节得非常均衡。但柔性轴的变动范围有限(升降太大,会引起相邻的其他滚轮也随之升降),而且这种机构中,从动齿轮也要跟随滚轮升降,升得太高,主动齿轮和从动齿轮之间就会脱离接触,就会不能啮合,其实两个齿轮之间还没有脱离接触时两个齿轮之间的传动就不能同步,所以滚轮升降的范围不能太大,如果进更厚的纸,这种机构的进纸效果就不太好。
4.万向节双组滚轮式走纸机构
万向节或万向联轴器机构是利用一个两端都有十字形叉形凸起的轴零件,在其两端与另外的轴的叉形接头相连,构成了一个可动的连接而做成。这种联轴器可以允许十字轴和两轴间有较大的夹角,而且在机器运行时,夹角发生改变仍可正常传动。为了不在传动中产生附加动载荷,实际使用中常采用双万向联轴器机构。
万向联轴器机构的结构非常简单,安装和维修等也都很方便。
万向节双组滚轮式走纸机构的滚轮组,与同轴双组滚轮式走纸机构的基本相同,所不同的是,有一组滚轮组(一般为上滚轮组)的每个单独滚轮,可以各自有一定的升降,配合不同的压力,适应不同厚度的进纸(见图2-71~图2-73)。
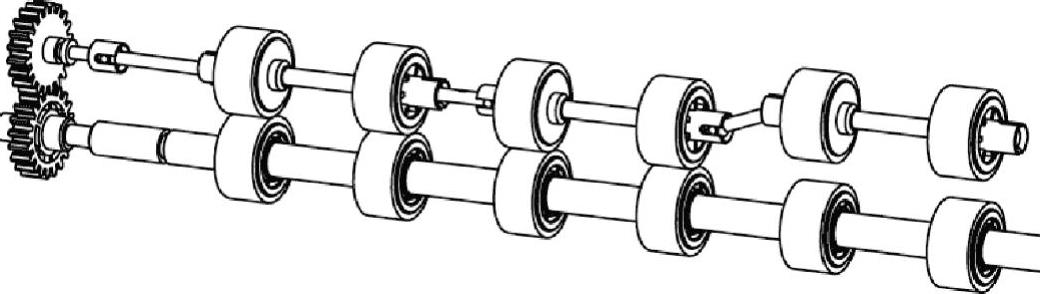
图2-71 万向节双组滚轮式走纸机构
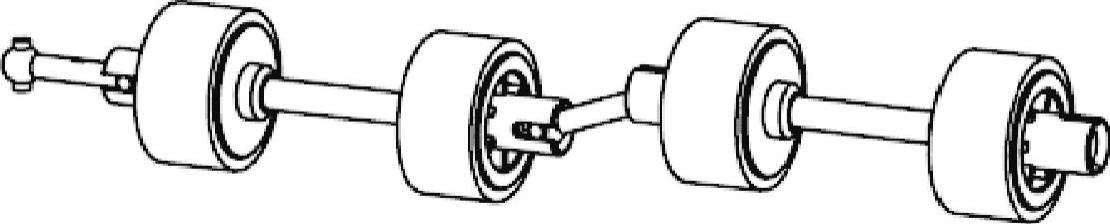
图2-72 万向节机构
这种机构中,从动齿轮不需跟随滚轮升降,所以滚轮升降的范围可以很大,但由于联轴器的斜角不能太大,否则容易卡死,如果进更厚的纸,联轴器就要做得很长,在一些比较紧凑的机器中不容易实现。
5.十字轮双组滚轮式走纸机构
十字轮双组滚轮式走纸机构的滚轮组,与万向节双组滚轮式走纸机构基本相同,所不同的是,没有斜角的要求,体积比较紧凑(见图2-74和图2-75)。
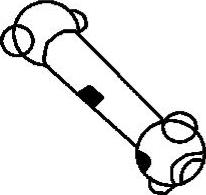
图2-73 万向节的连接轴
注:浮动滚轮之间由联轴器连接,每个滚轮都可以上下移动,每个滚轮独立承受弹簧的压力,产生进纸的带动力。
相对于万向节机构,十字轮机构会引起附加的离心力,这个离心力随着转动的角度变化而变化,引起滚轮压力的脉动变化。
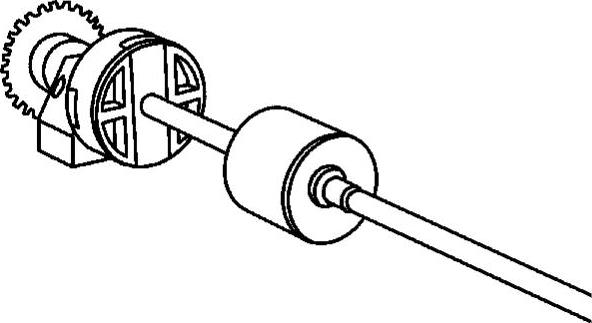
图2-74 组装图
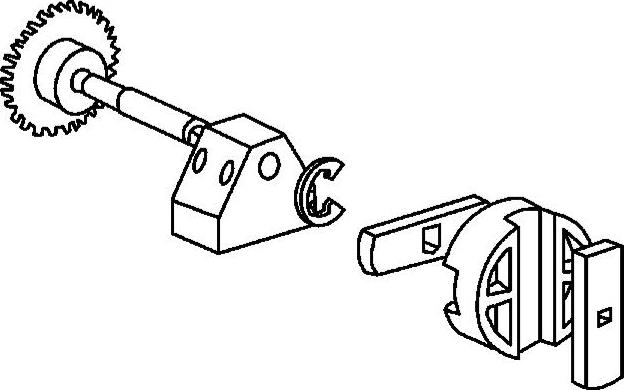
图2-75 分解图
注:浮动滚轮之间由十字轮机构连接,每个滚轮都可以上下移动,每个滚轮独立承受弹簧的压力,产生进纸的带动力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。