



导轨-皮带式字车驱动机构如图2-42所示。皮带轮顺时针或逆时针方向转动时,皮带带动载有打印头的字车向左或向右移动,横梁导轨和字车轴导轨限制字车的移动轨迹为平直的直线,字车将打印头移动到需要打印的位置。
当字车开始起步移动时,首先经过一个位置传感器——初始位置(Home Position,HP)传感器,打印机的处理器会记录这个位置,以这个位置为基准对字车移动的步数进行计算;这个点还作为打印时的基准点,稿件的左右打印页边界都是根据这个点计算后得出的。
对于双向打印,由于皮带和传动机构都有返程间隙,字车向左和向右移动时会有一定的位置偏差,这个位置偏差会造成相邻两行的字符的垂直方向或竖线不对齐,解决方法是进行补偿,一般可以利用软件进行。但随着使用时间的增长,皮带会逐渐松弛,位置偏差的量会逐渐增大,为了避免皮带的松弛而造成位置偏差量不固定,需要对皮带进行张紧,张紧一般有单带轮张紧机构和张紧轮机构两种方式(见图2-43和图2-44)。
由于大部分品种的打印机的字车皮带都比较长,所以其张紧方式基本上是采用单带轮张紧机构。
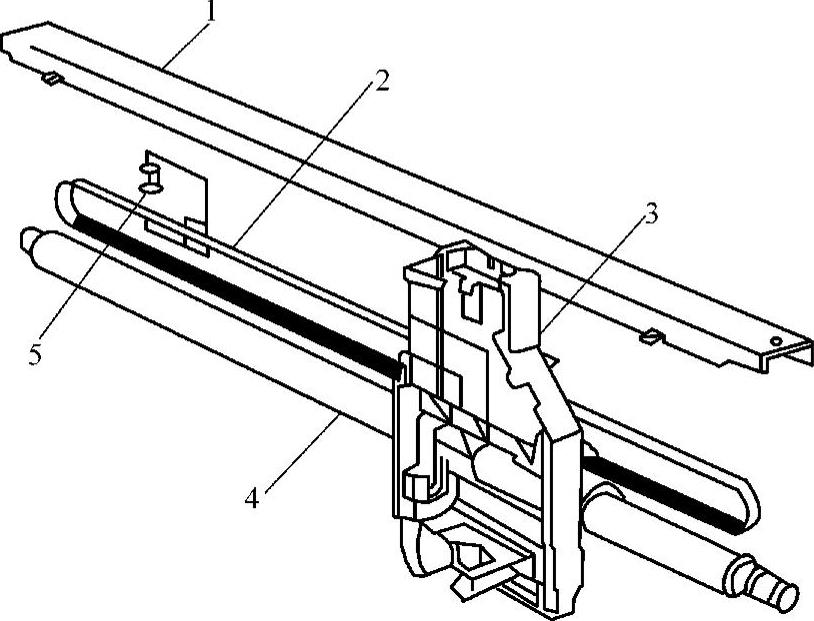
图2-42 导轨-皮带式字车驱动机构
1—横梁导轨 2—皮带 3—字车(打印头) 4—字车轴导轨 5—位置传感器
注:1.字车的轨迹由横梁导轨和字车轴导轨限定为直线,所以其运动只能为直线运动。
2.皮带由左右两个带轮固定,两个带轮中,其中一个提供转动的动力,带轮来回转动时,皮带固定字车的部分作左右的横向运动,从而带动字车作左右的横向运动。(https://www.xing528.com)
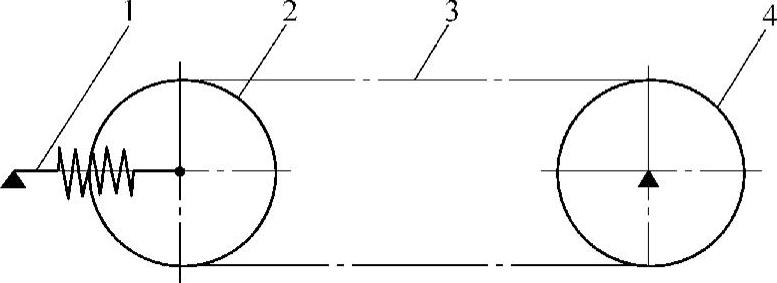
图2-43 单带轮张紧机构
1—拉伸弹簧 2—从动轮 3—皮带 4—主动轮
注:从动轮由弹簧预先拉紧,从而绷紧皮带,使皮带的松弛随时得到补偿。这种方式比较适合于长皮带的场合。
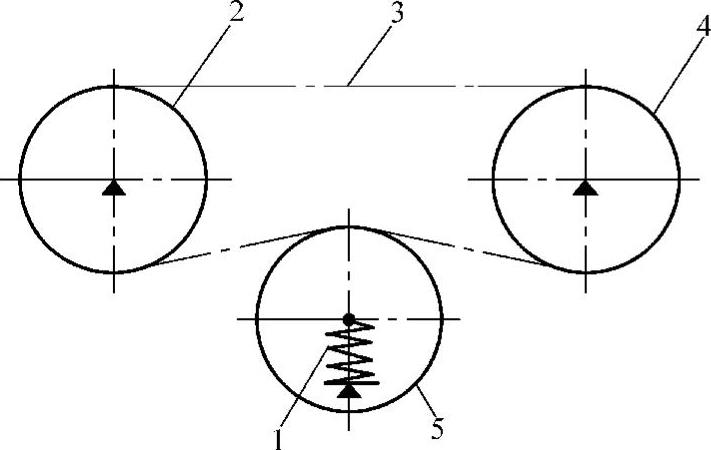
图2-44 张紧轮机构
1—压缩弹簧 2—从动轮 3—皮带 4—主动轮 5—张紧轮
注:张紧轮由弹簧压向皮带,从而绷紧皮带,使皮带的松弛随时得到补偿。这种方式比较适合于短皮带的场合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。