



本实例以如图7-93所示的机械臂为例,介绍如何制作机械臂运动的动画。在本实例中,机械臂的运动过程如下:
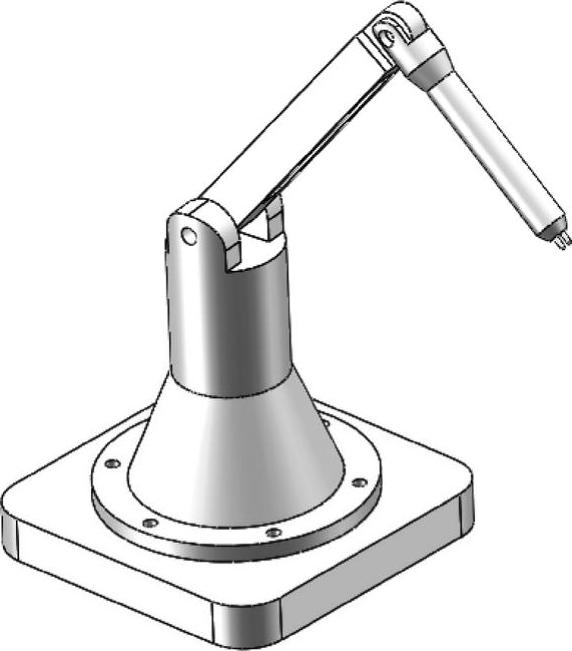
图7-93 机械臂
●转台旋转90°,运动的时间长度为2秒。
●暂停0.5秒。
●上臂旋转30°,运动的时间为1.5秒。
●执行器在上臂开始运动后0.5秒开始运动,转动15°,运动时间为3秒。
机械臂在开始运动时和运动结束的姿态如图7-94所示。在制作动画的过程中,我们需要添加3个马达,然后通过设置键码的触发马达的运动即可。
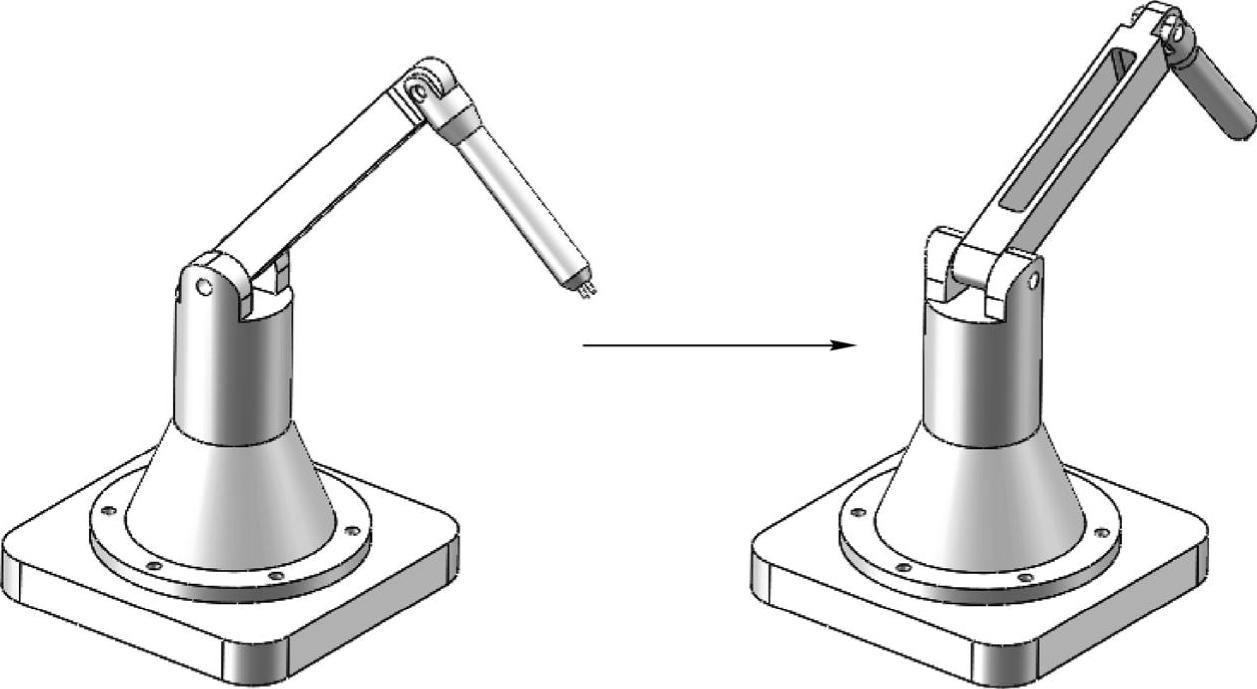
图7-94 机械臂的运动
 ——参见附带光盘中的“Start/ch7/7.3.2”文件夹。
——参见附带光盘中的“Start/ch7/7.3.2”文件夹。
 ——参见附带光盘中的“End/ch7/7.3.2”文件夹。
——参见附带光盘中的“End/ch7/7.3.2”文件夹。
 ——参见附带光盘中的AVI/ch7/7.3.2.avi
——参见附带光盘中的AVI/ch7/7.3.2.avi
(1)在随书光盘中打开“机械臂.sldasm”,如图7-95所示。
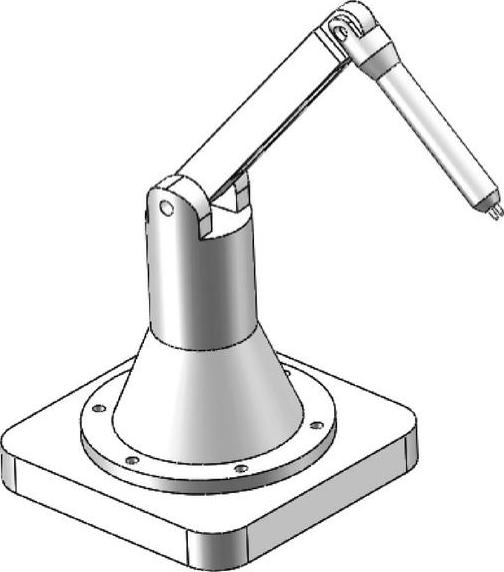
图7-95 打开模型
(2)单击“运动算例1”,使软件转到动画和仿真界面,并选择算例类型为“动画”,如图7-96所示。
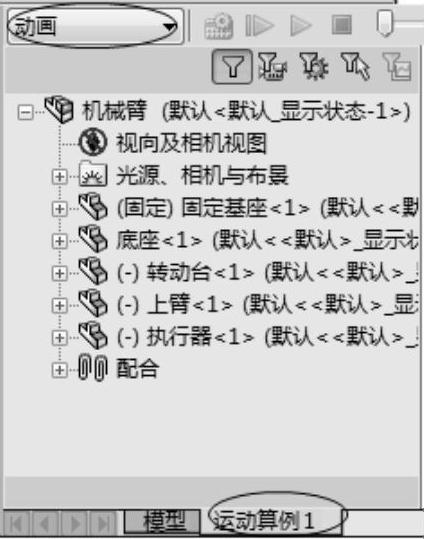
图7-96 设置算例类型
(3)单击“马达 ”,左侧弹出如图7-97所示的对话框,在“马达类型”中选择“旋转马达”,在“马达位置
”,左侧弹出如图7-97所示的对话框,在“马达类型”中选择“旋转马达”,在“马达位置 ”中选择图中所示的面,在“函数”中选择“线段”,则自动弹出如图7-98所示的函数编制程序,在程序的左边输入线段函数;如图7-99所示,在“值”中选择“位移(度)”,在“自变量”中选择“时间”,然后在下面的表格中输入图中所示的值,最后查看右边的函数图表,如图7-100所示,确认无误后,单击“确定”关闭函数编制程序,再单击“确定
”中选择图中所示的面,在“函数”中选择“线段”,则自动弹出如图7-98所示的函数编制程序,在程序的左边输入线段函数;如图7-99所示,在“值”中选择“位移(度)”,在“自变量”中选择“时间”,然后在下面的表格中输入图中所示的值,最后查看右边的函数图表,如图7-100所示,确认无误后,单击“确定”关闭函数编制程序,再单击“确定 ”插入“马达1”。
”插入“马达1”。

图7-97 插入马达1
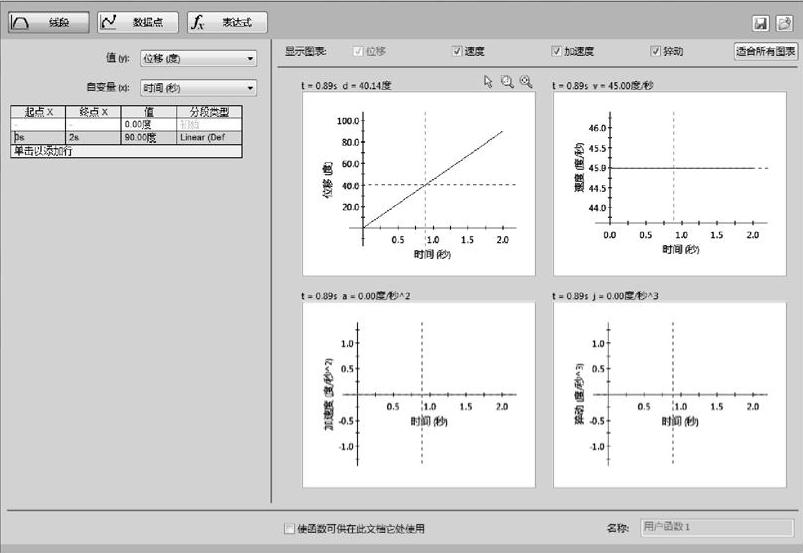
图7-98 函数编制程序
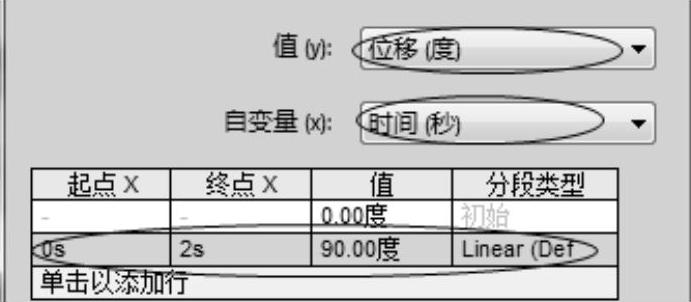
图7-99 输入线段函数
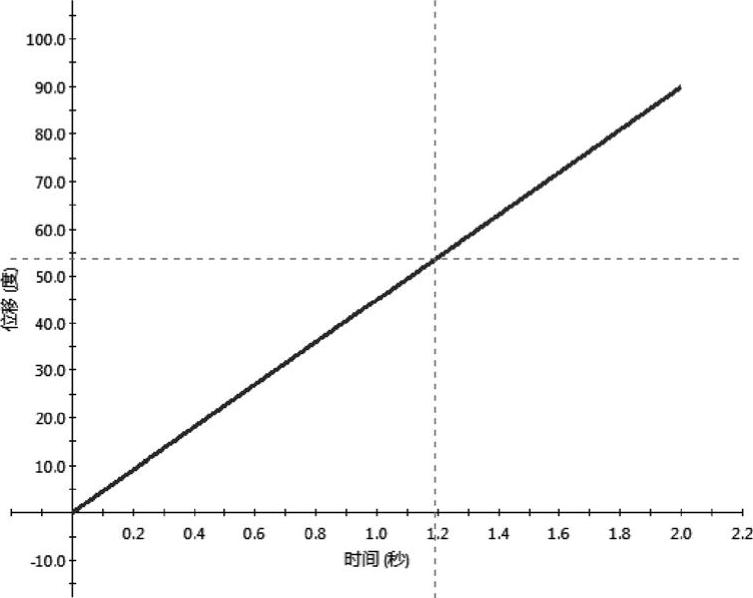
图7-100 马达运动函数图表
(4)如图7-101所示,拖动全局键码到6秒的位置,使动画的时间为6秒。
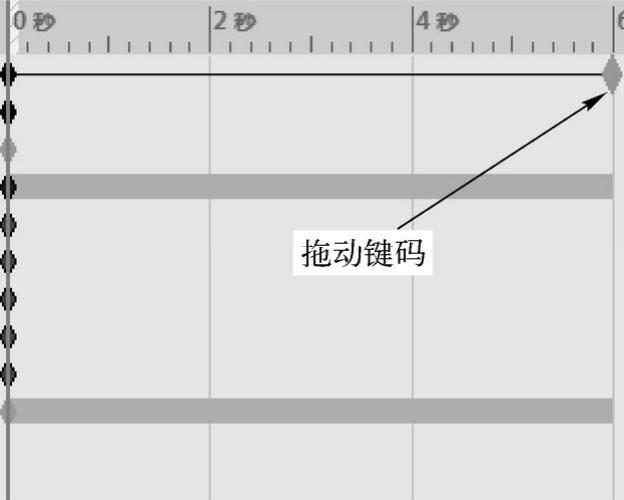
图7-101 拖动键码
(5)移动鼠标到“旋转马达1”的时间线上,单击右键,在如图7-102所示的右键菜单中选择“放置键码”,放置一个键码,然后把键码拖动到2秒的位置。选择这个键码,单击右键,弹出如图7-103所示的菜单,单击“关闭”,关闭马达。关闭马达后的时间栏如图7-104所示。
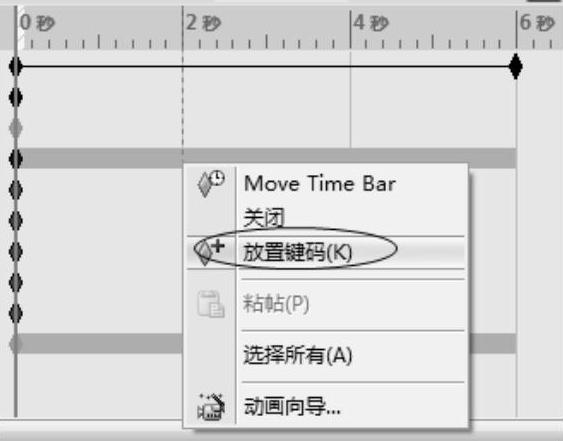
图7-102 右键菜单
 (https://www.xing528.com)
(https://www.xing528.com)
图7-103 关闭马达
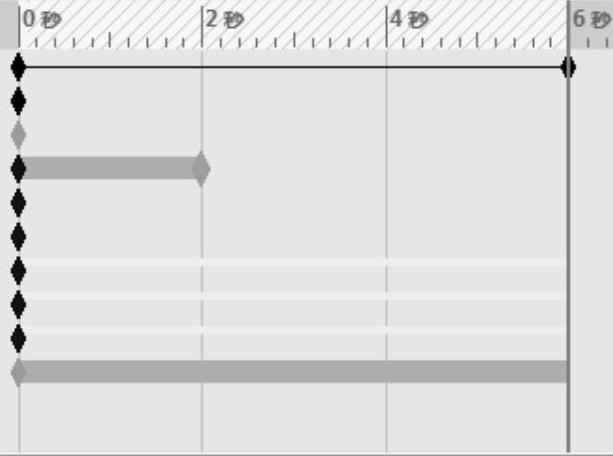
图7-104 关闭马达后的时间栏
(6)单击“马达 ”,左侧弹出如图7-105所示的对话框,在“马达位置
”,左侧弹出如图7-105所示的对话框,在“马达位置 ”中选择图中所示的面,在“马达类型”中选择“旋转马达”,在“函数”中选择“线段”,在“马达位置
”中选择图中所示的面,在“马达类型”中选择“旋转马达”,在“函数”中选择“线段”,在“马达位置 ”中则选择上臂的面,在“想对此而移动的零部件”中选择转台,选中“反向
”中则选择上臂的面,在“想对此而移动的零部件”中选择转台,选中“反向 ”;在“函数”中选择“线段”,在弹出的函数编制程序中输入图7-106所示的值,输入线段函数后,查看右边的函数图表,如图7-107所示,确认无误后,单击“确定”关闭函数编制程序,再单击“确定
”;在“函数”中选择“线段”,在弹出的函数编制程序中输入图7-106所示的值,输入线段函数后,查看右边的函数图表,如图7-107所示,确认无误后,单击“确定”关闭函数编制程序,再单击“确定 ”插入马达2。
”插入马达2。
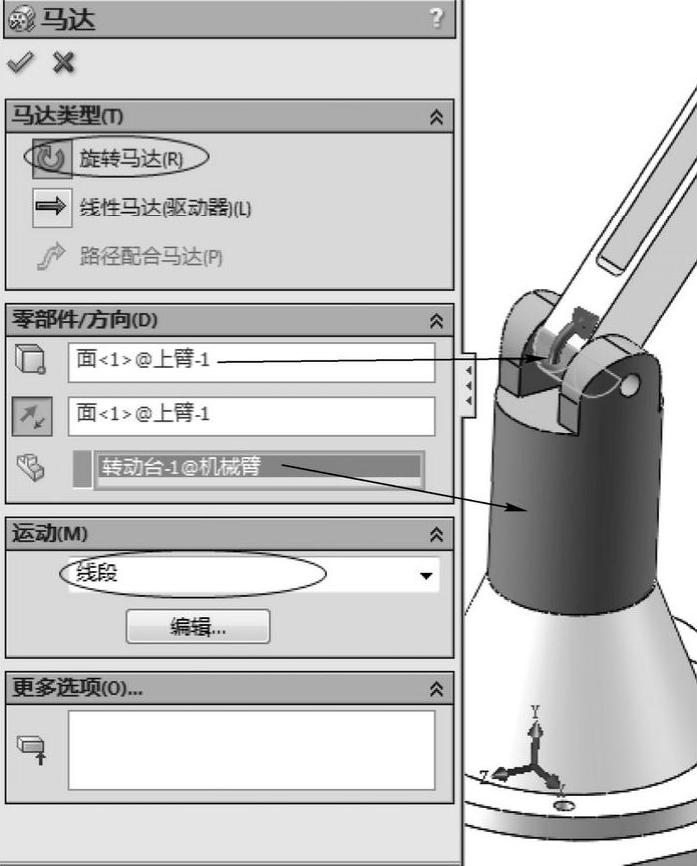
图7-105 旋转马达2
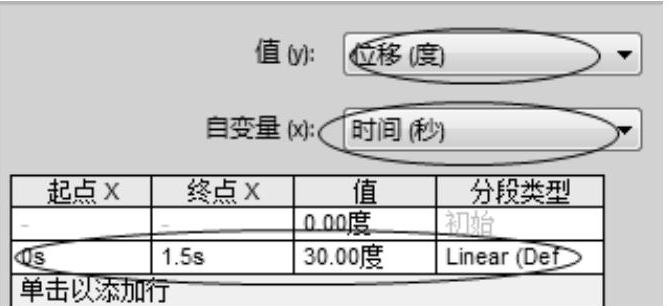
图7-106 输入线段函数
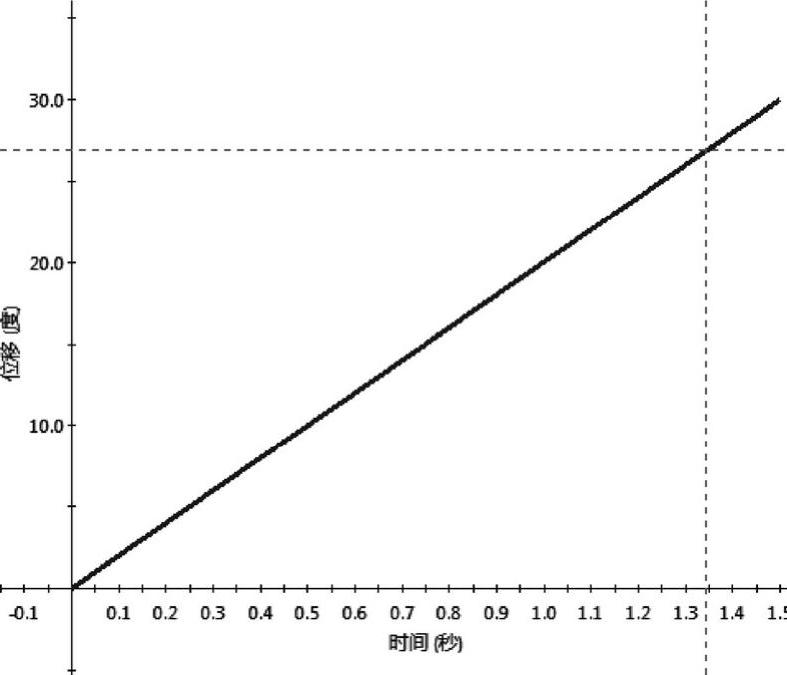
图7-107 函数图表
(7)如图7-108所示,拖动马达2的键码到2.5秒的位置。然后在4秒的位置放置一个键码到马达2的时间线上,如图7-109所示;最后选择这个键码,单击右键,弹出如图7-110所示的菜单,单击“关闭”,关闭马达2。关闭马达2后的时间栏如图7-111所示。
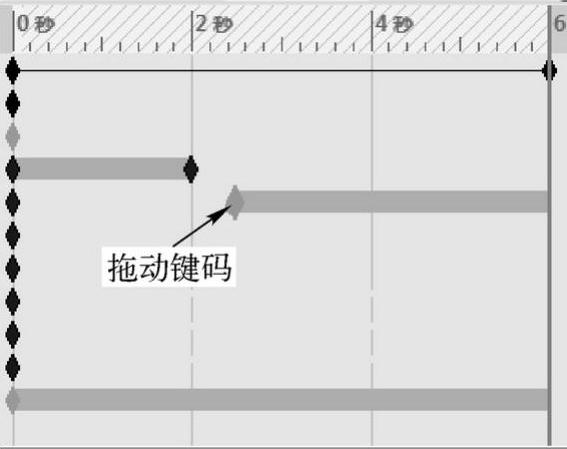
图7-108 拖动马达2的键码
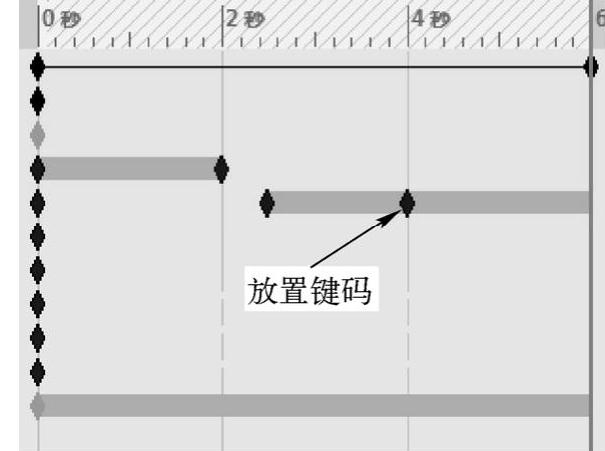
图7-109 放置键码
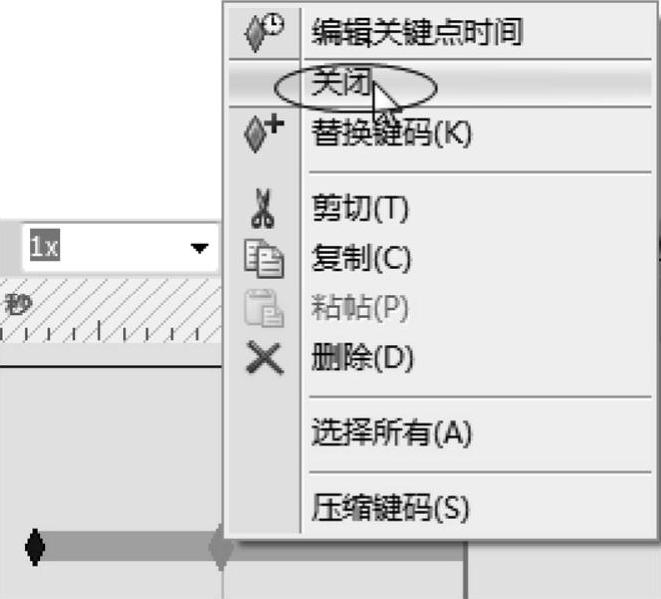
图7-110 关闭马达2
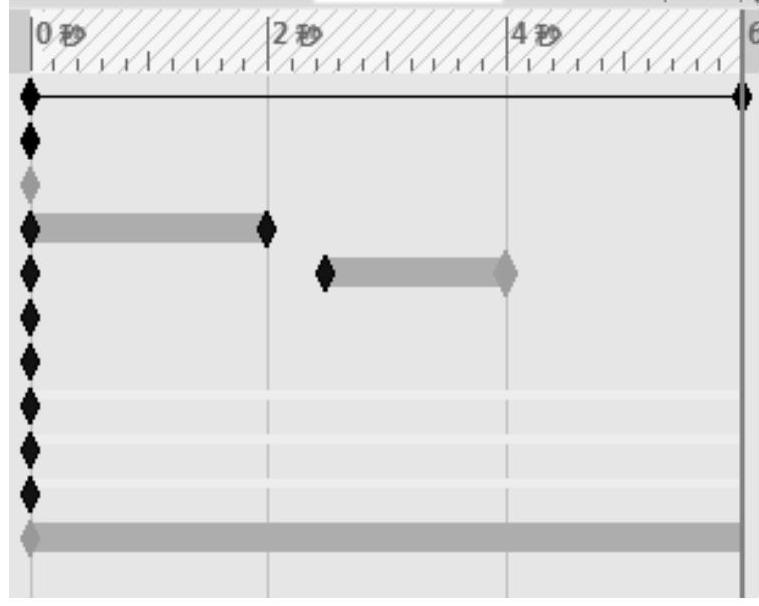
图7-111 关闭马达2后的时间栏
(8)单击“马达 ”,左侧弹出如图7-112所示的对话框,在“马达位置
”,左侧弹出如图7-112所示的对话框,在“马达位置 ”中选择图中所示的面,在“马达类型”中选择“旋转马达”,在“函数”中选择“线段”,在“马达位置
”中选择图中所示的面,在“马达类型”中选择“旋转马达”,在“函数”中选择“线段”,在“马达位置 ”中则选择执行器的面,在“想对此而移动的零部件”中选择上臂,;在“函数”中选择“线段”,在弹出的函数编制程序中输入如图7-113所示的值,输入线段函数后,查看右边的函数图表,如图7-114所示,确认无误后,单击“确定”关闭函数编制程序,再单击“确定
”中则选择执行器的面,在“想对此而移动的零部件”中选择上臂,;在“函数”中选择“线段”,在弹出的函数编制程序中输入如图7-113所示的值,输入线段函数后,查看右边的函数图表,如图7-114所示,确认无误后,单击“确定”关闭函数编制程序,再单击“确定 ”插入马达3。
”插入马达3。
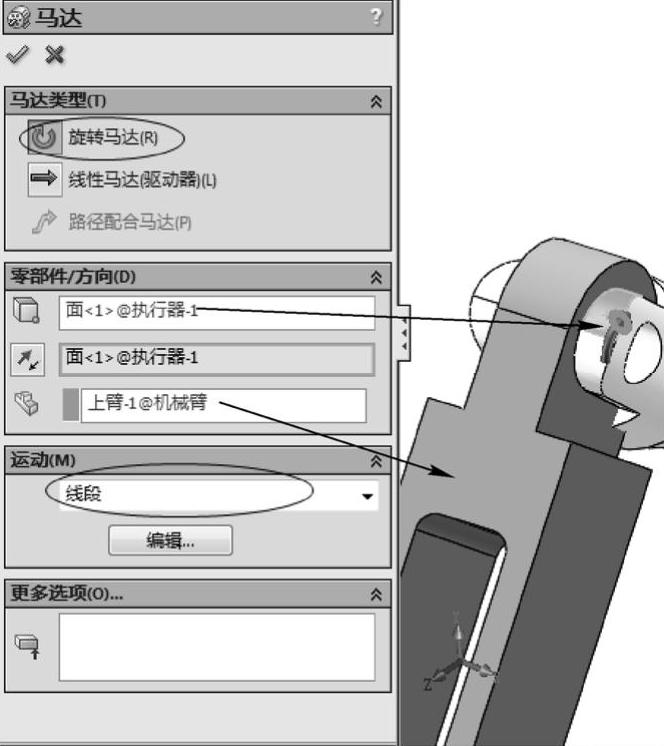
图7-112 旋转马达2
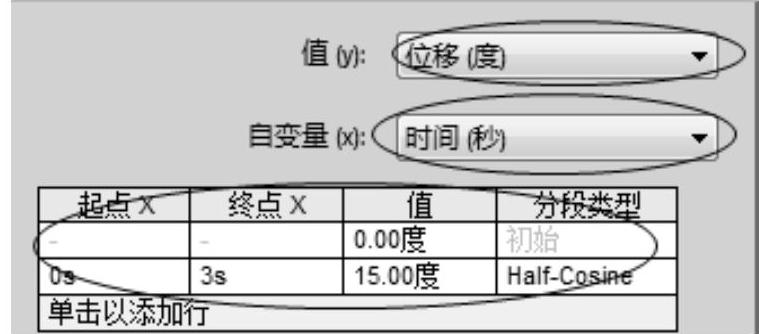
图7-113 输入线段函数
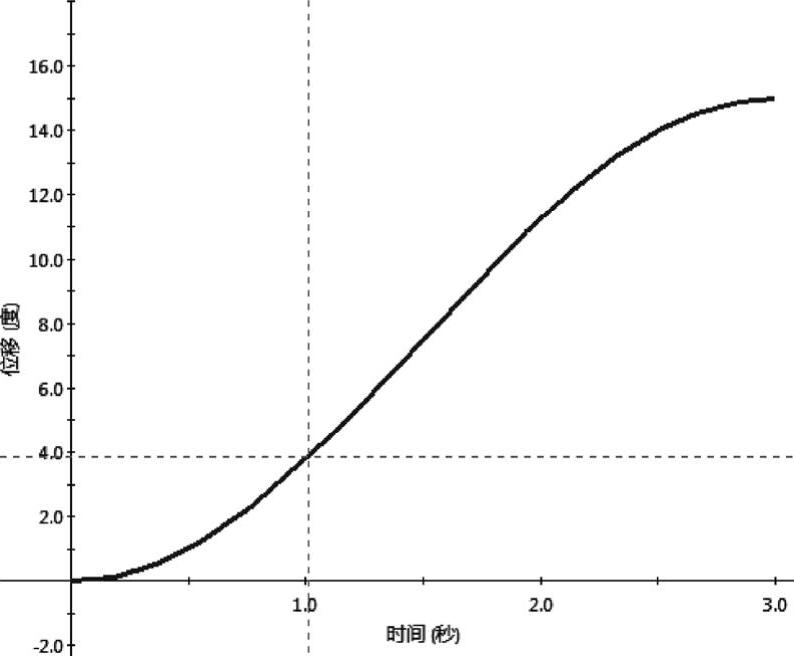
图7-114 函数图表
(9)如图7-115所示,拖动马达2的键码到3秒的位置。然后在6秒的位置放置一个键码到马达3的时间线上,如图7-116所示;最后选择这个键码,单击右键,在弹出的右键菜单中选择“关闭”,关闭马达3。
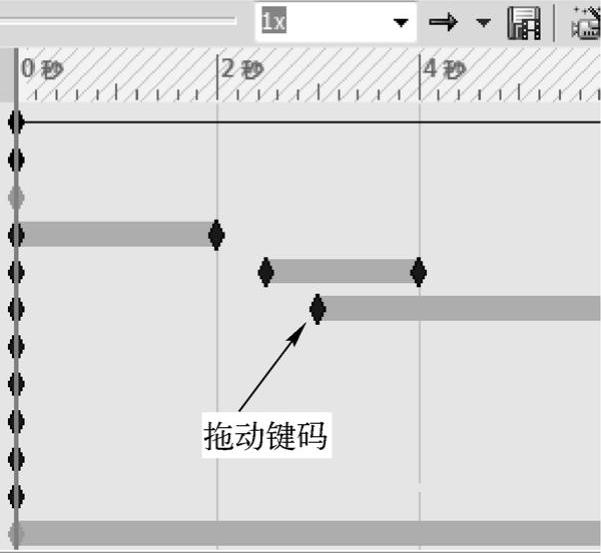
图7-115 拖动键码
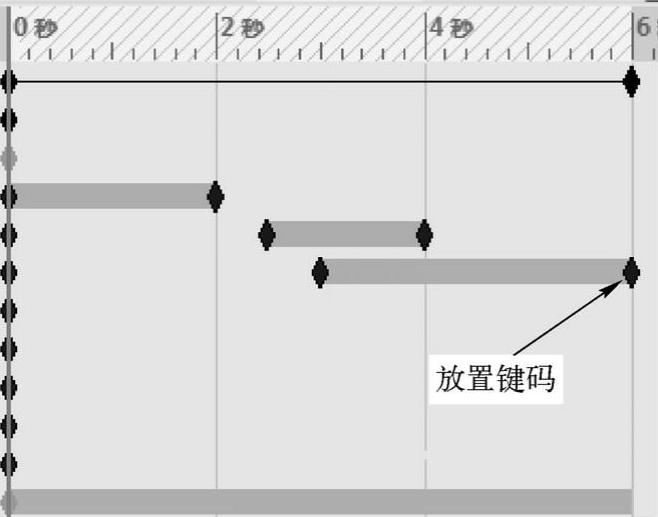
图7-116 放置键码
(10)单击“计算 ”,此时自动生成动画,如图7-117所示。
”,此时自动生成动画,如图7-117所示。
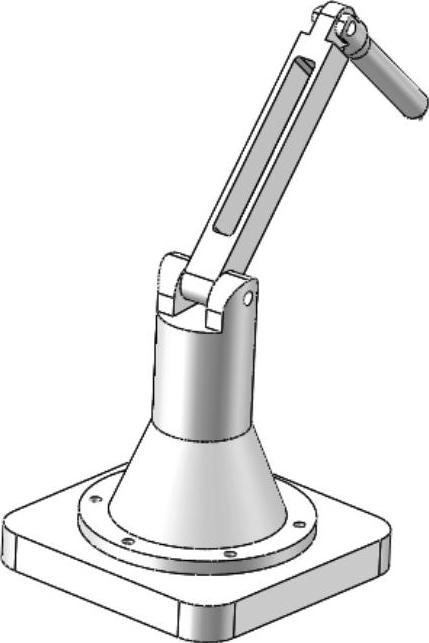
图7-117 生成动画
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。