



配合是定义零部件之间的相对位置,配合的过程同时也是定义零部件之间相对位置的过程。装配体中的零部件是通过配合来组合在一起。两个零部件之间可以添加多个配合,但是和草图的约束类似,如果两个零部件的配合过多而导致冲突,也会出现“过定义”的状态。
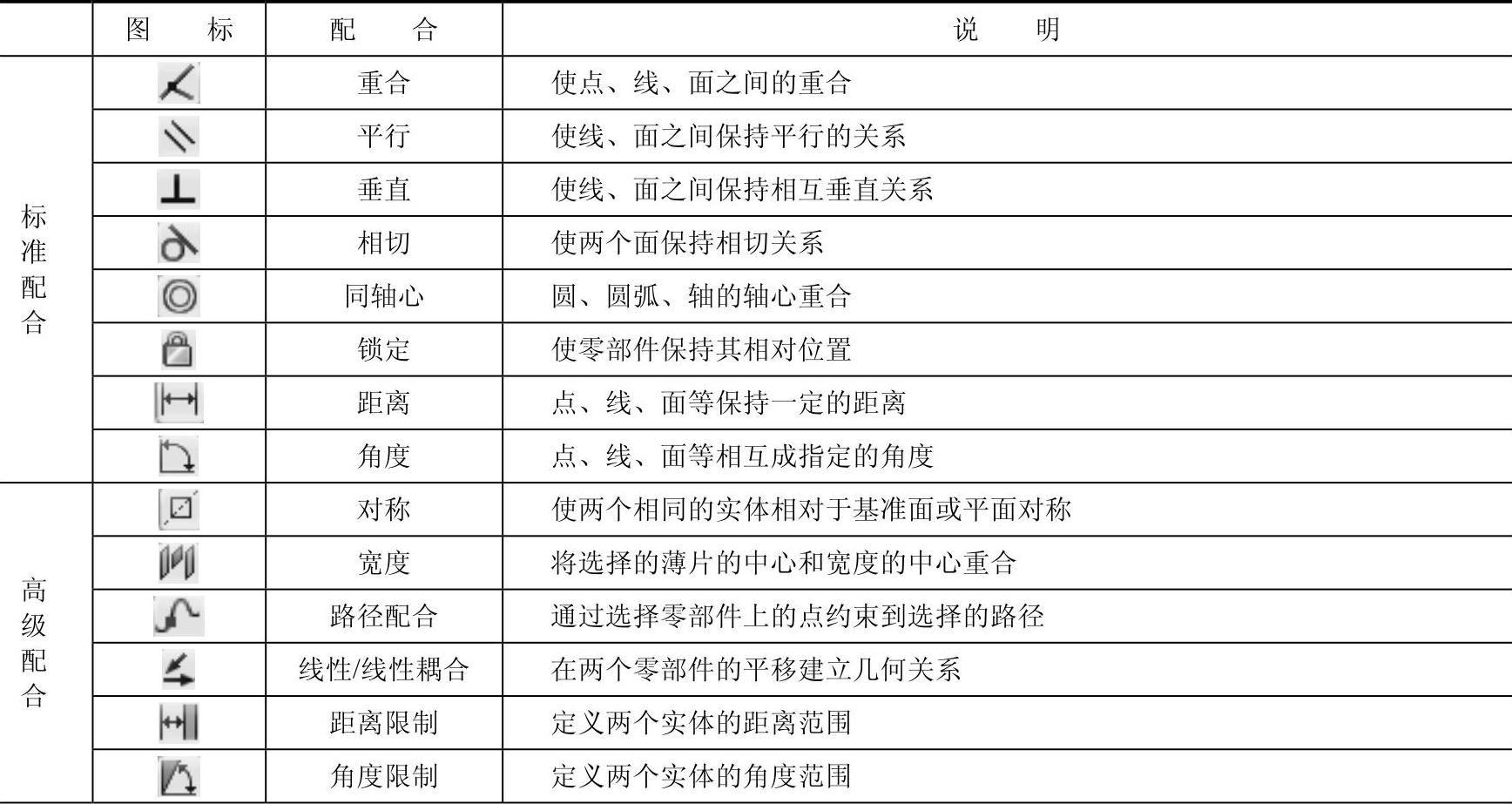
SolidWorks配合有三大类:标准配合、高级配合和机械配合,如表5-1所示。
表5-1 配合的类型
(续)
1.标准配合
 ——参见附带光盘中的AVI/ch5/5.1.4.1.avi
——参见附带光盘中的AVI/ch5/5.1.4.1.avi
标准配合中包含了最基本的配合,例如同心、重合、平行、距离、角度、相切、锁定等配合。
(1)重合配合
重合配合是使两个零件的面或者边线重合。下面以一个例子来说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-50所示的对话框。
”,弹出如图5-50所示的对话框。
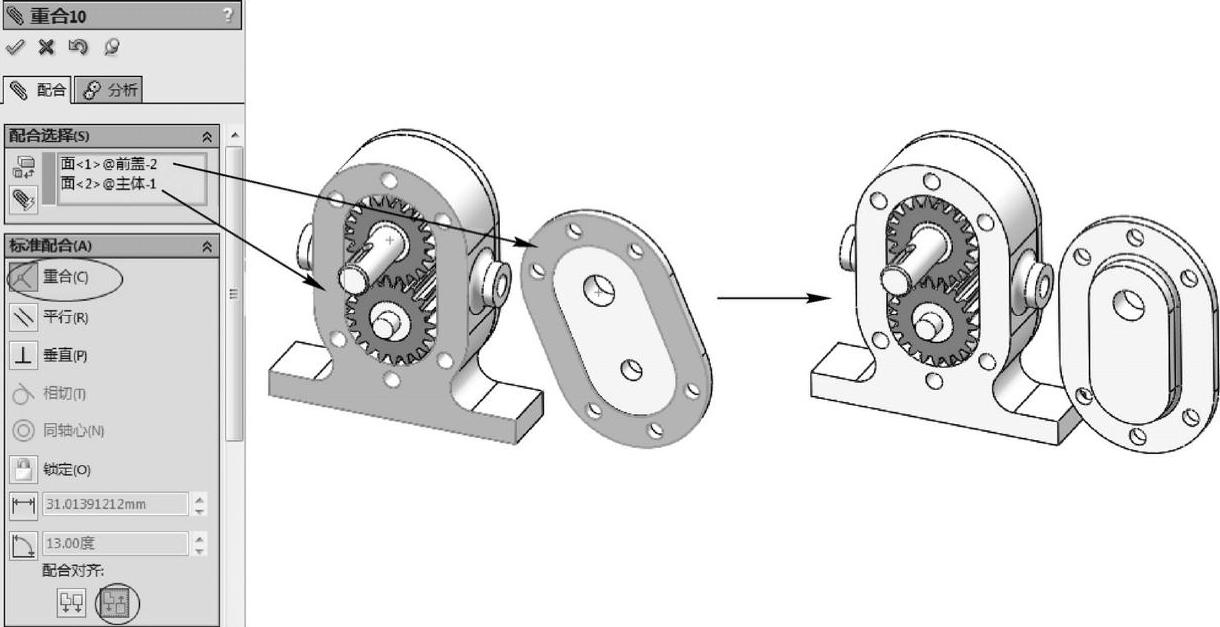
图5-50 重合配合
●在“要配合的实体”中选择前盖和主体的端面。
●在“标准配合”单击“重合 ”。
”。
●单击“配合对齐”中的“反向对齐 ”。
”。
●单击“确定 ”完成配合。
”完成配合。
添加重合配合时,首先要选择要配合的实体,然后单击“重合 ”,在必要的情况下还需要设置配合对齐。配合对齐包括同向对齐和反向对齐,同向对齐是零部件的实体都在重合面的同一侧,而反向对齐是零部件的实体分别在重合面的两侧。
”,在必要的情况下还需要设置配合对齐。配合对齐包括同向对齐和反向对齐,同向对齐是零部件的实体都在重合面的同一侧,而反向对齐是零部件的实体分别在重合面的两侧。
(2)平行配合
平行配合是使两个零部件的平面或者直线之间保持平行的关系。现在以实例说明其操作步骤:
●单击装配体工具栏中的“配合 ”,弹出如图5-51所示的对话框。
”,弹出如图5-51所示的对话框。
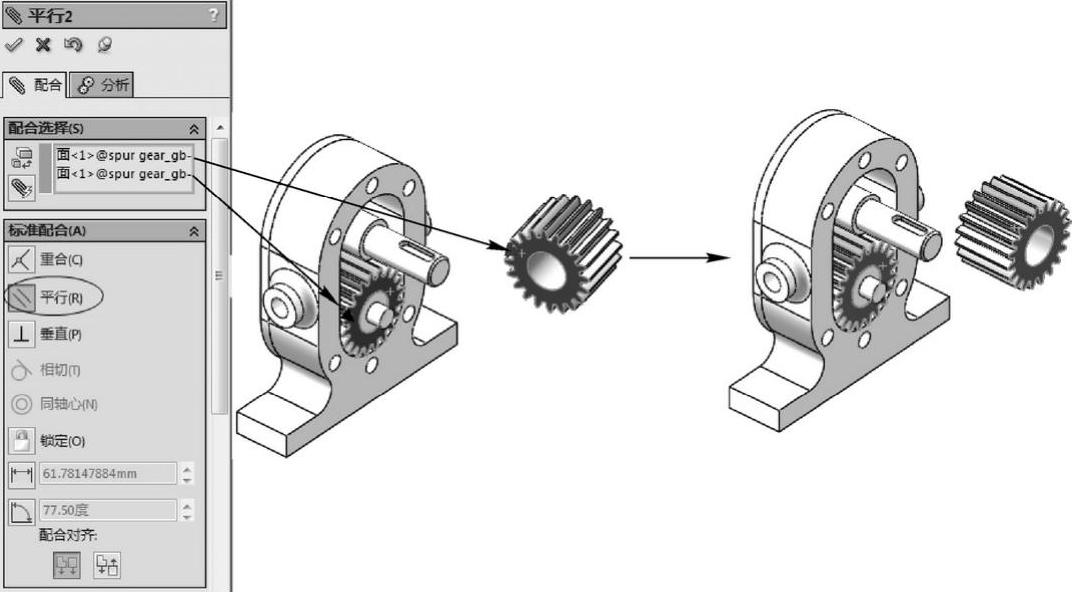
图5-51 平行配合
●在“要配合的实体”中选择两个齿轮的端面。
●在“标准配合”中单击“平行 ”。
”。
●单击“确定 ”完成配合。
”完成配合。
(3)垂直配合
垂直配合是使所选的两个零部件的实体之间保持垂直的关系。下面以一个例子说明其操作步骤:
●单击装配体工具栏中的“配合 ”,弹出如图5-52所示的对话框。
”,弹出如图5-52所示的对话框。
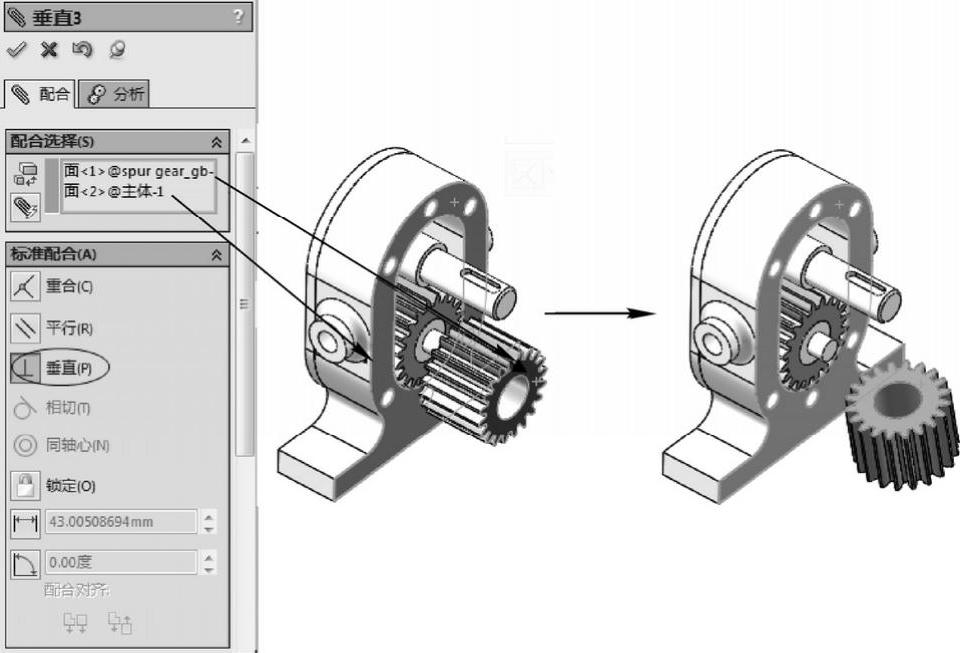
图5-52 垂直配合
●在“要配合的实体”中选择主体和齿轮的端面。
●在“标准配合”单击“垂直 ”。
”。
●单击“确定 ”完成配合。
”完成配合。
(4)相切配合
相切配合是使两个零部件的实体保持相切的关系,它既可以是曲面之间保持相切关系,也可以是曲面和平面之间保持相切关系。下面以一个例子来说明添加相切配合的操作步骤:
●单击装配体工具栏中的“配合 ”,弹出如图5-53所示的对话框。
”,弹出如图5-53所示的对话框。
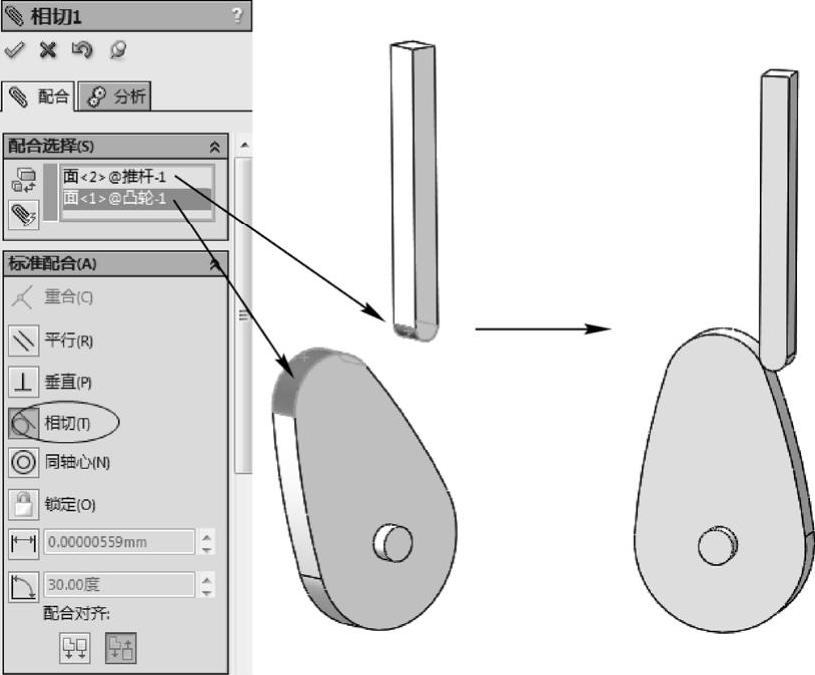
图5-53 相切配合
●在“要配合的实体”中选择图中所示的凸轮和推杆的面。
●在“标准配合”中单击“相切 ”。
”。
●单击“确定 ”完成配合。
”完成配合。
(5)同心配合
同心配合是使两个零部件的中心轴线重合。下面举例说明其操作步骤:
●单击装配体工具栏中的“配合 ”,弹出如图5-54所示的对话框。
”,弹出如图5-54所示的对话框。
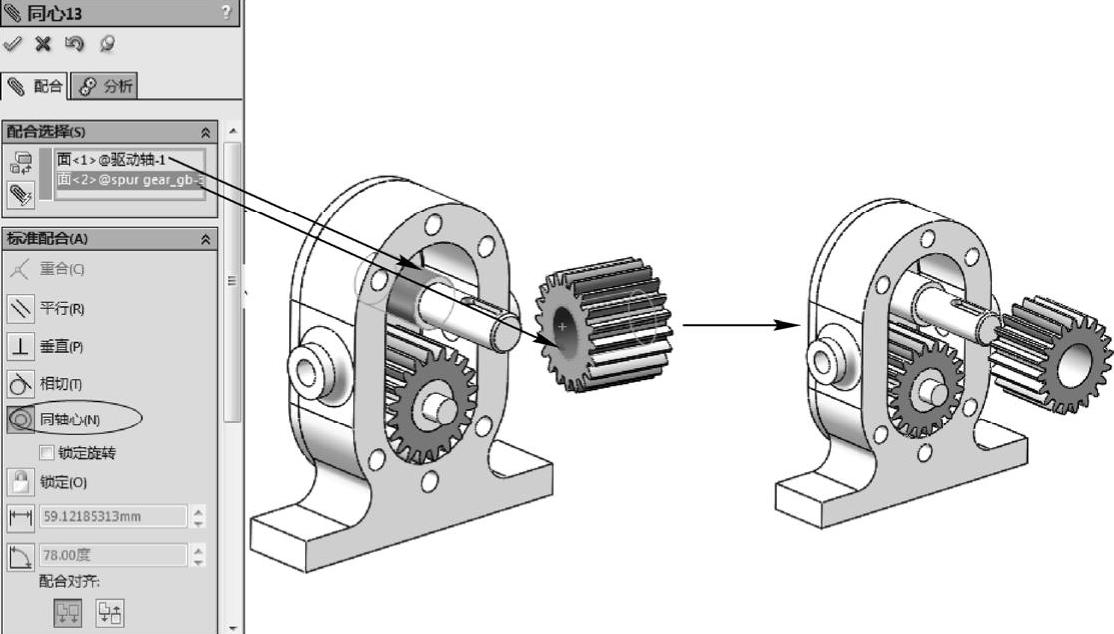
图5-54 同心配合
●在“要配合的实体”中选择驱动轴的和齿轮的圆柱面。
●在“标准配合”中单击“同轴心 ”。
”。
●单击“确定 ”完成配合。
”完成配合。
在添加同心配合后,两个零件之间还可以有旋转运动,如果要约束旋转运动,可以勾选“锁定旋转”,此时两个零件就只能有轴向的相对运动。
(6)锁定配合
锁定配合是使两个零部件之间的相对位置固定,但是这种固定是相对的,在没有添加其他约束的情况下,它们还可以相对其他的零部件运动。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-55所示的对话框。
”,弹出如图5-55所示的对话框。
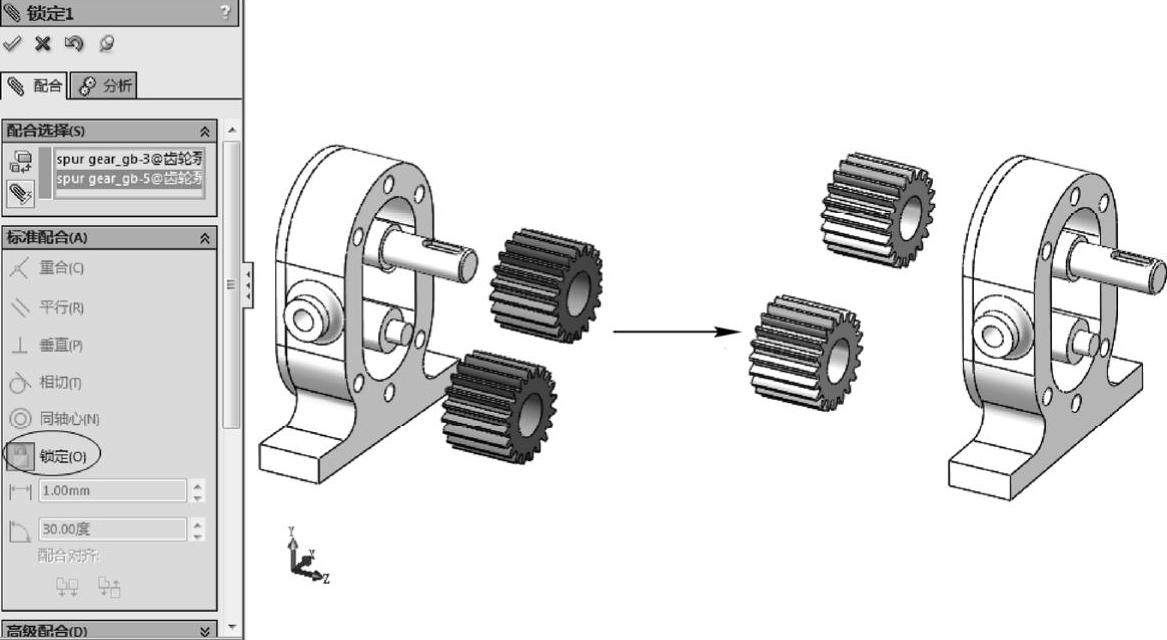
图5-55 锁定配合
●在“要配合的实体”中选择图中的两个齿轮。
●在“标准配合”单击“锁定 ”。
”。
●单击“确定 ”完成配合。
”完成配合。
(7)距离配合
距离配合是使两个零部件的实体保持固定的距离。和平行配合不同的是,距离配合不但使两个实体保持平行的关系,而且使它们之间的距离固定。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-56所示的对话框。
”,弹出如图5-56所示的对话框。
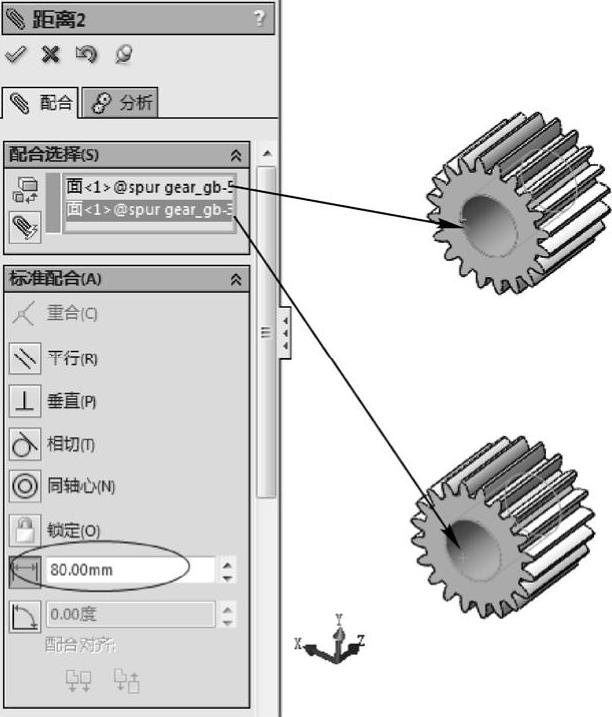
图5-56 距离配合
●在“要配合的实体”中选择图中所示的两个齿轮的圆柱面。
●在“标准配合”中单击“距离 ”,并输入距离值90。
”,并输入距离值90。
●单击“确定 ”完成配合。
”完成配合。
(8)角度配合
角度配合是使两个零部件的实体保持一定的角度。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-57所示的对话框。
”,弹出如图5-57所示的对话框。
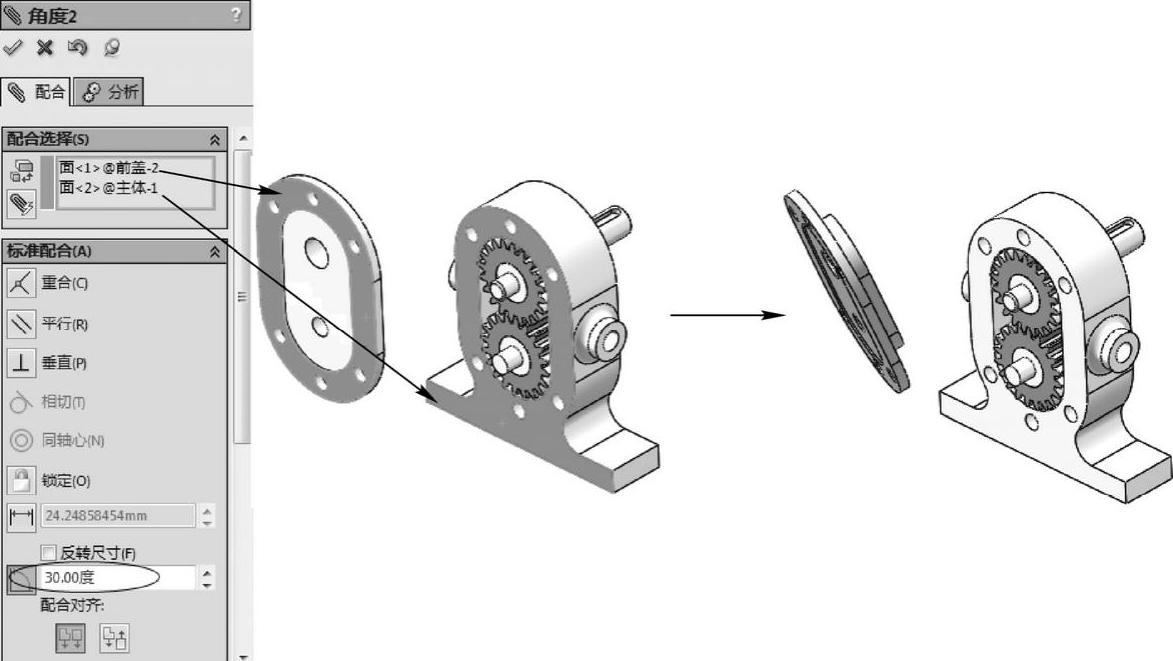
图5-57 角度配合
●在“要配合的实体”中选择图中所示的前盖和主体的两个平面。
●在“标准配合”单击“角度 ”,并输入角度值30°。
”,并输入角度值30°。
●单击“确定 ”完成配合。
”完成配合。
2.高级配合
 ——参见附带光盘中的AVI/ch5/5.1.4.2.avi
——参见附带光盘中的AVI/ch5/5.1.4.2.avi
高级配合包括对称、宽度、线性/线性耦合等配合。虽然高级配合并不常用,但是在特定的情况下,它可以带来比标准配合更加方便的配合方式。
(1)对称配合
对称配合是使两个零部件所选的实体相对于基准面或者平面对称。要添加对称配合时,必须要选取一个面作为对称面。下面举例说明对称配合的操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-58所示的对话框。
”,弹出如图5-58所示的对话框。
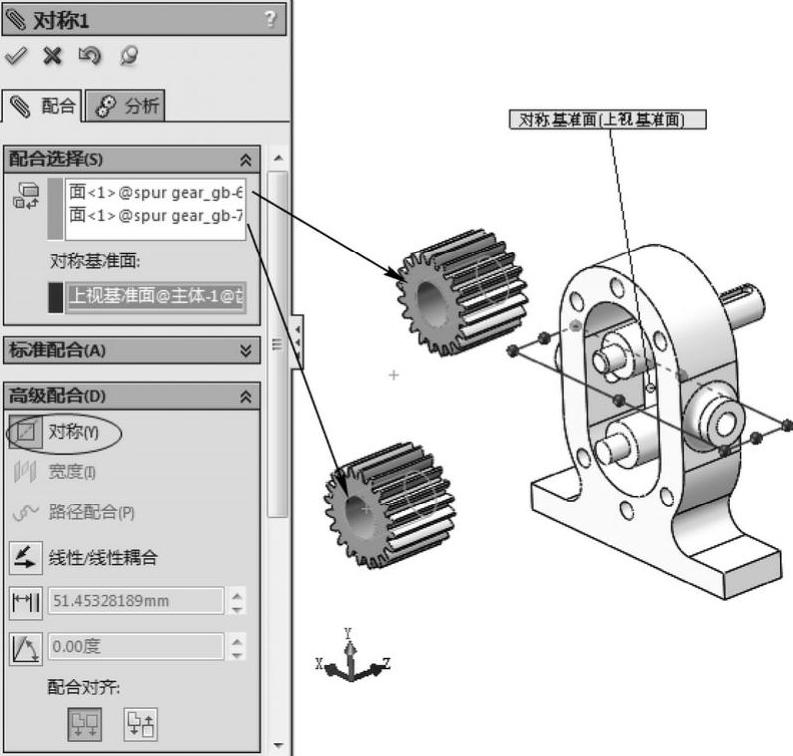
图5-58 对称配合
●在“高级配合”中单击“对称 ”。
”。
●在“要配合的实体”中选择图中所示的两个齿轮的圆柱面。
●在“对称基准面”中选择主体的上视基准面作为两个齿轮内孔圆柱面的对称配合面。
●单击“确定 ”完成配合。
”完成配合。
从上面的操作步骤中可以看到,如果要使两个零部件相对于基准面对称时,使用对称配合无疑是最好的选择,当然,标准配合也可以达到相同的效果,但是需要添加多个标准配合才行,因此,高级配合在特定的情况下会比标准配合方便。
(2)宽度配合
宽度配合是使两组平面的对称面重合,而其中的一组距离较小的面称为“薄片”,另外的一组面称之为“宽度”。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-59所示的对话框。
”,弹出如图5-59所示的对话框。
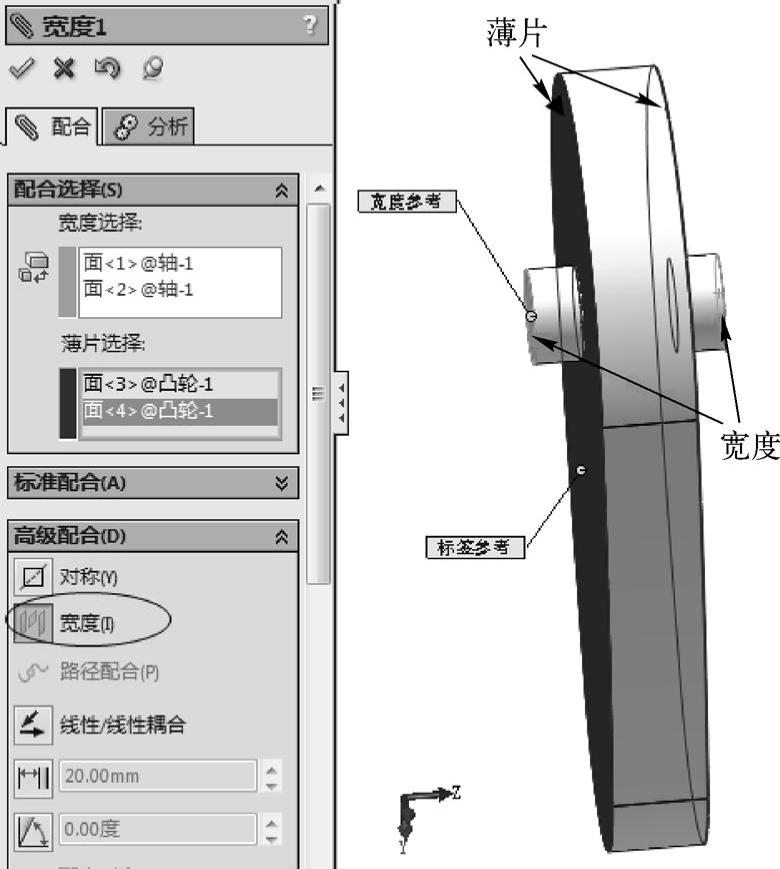
图5-59 宽度配合
●在“高级配合”中单击“宽度 ”。
”。
●在“宽度选择”中选择图中所示的轴的两个端面。
●在“薄片选择”中选择图中所示的凸轮的两个端面。
●单击“确定 ”完成配合。
”完成配合。
(3)路径配合
路径配合是把零部件上的点约束在一条曲线或者直线上,该点只能以这条曲线或者直线作为运动路径。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-60所示的对话框。
”,弹出如图5-60所示的对话框。
●在“高级配合”中单击“路径配合 ”。
”。
●在“零部件顶点”中选择图中所示的推杆的顶点。
●在“路径选择”中选择图中所示的凸轮边线。
●单击“确定 ”完成配合。
”完成配合。
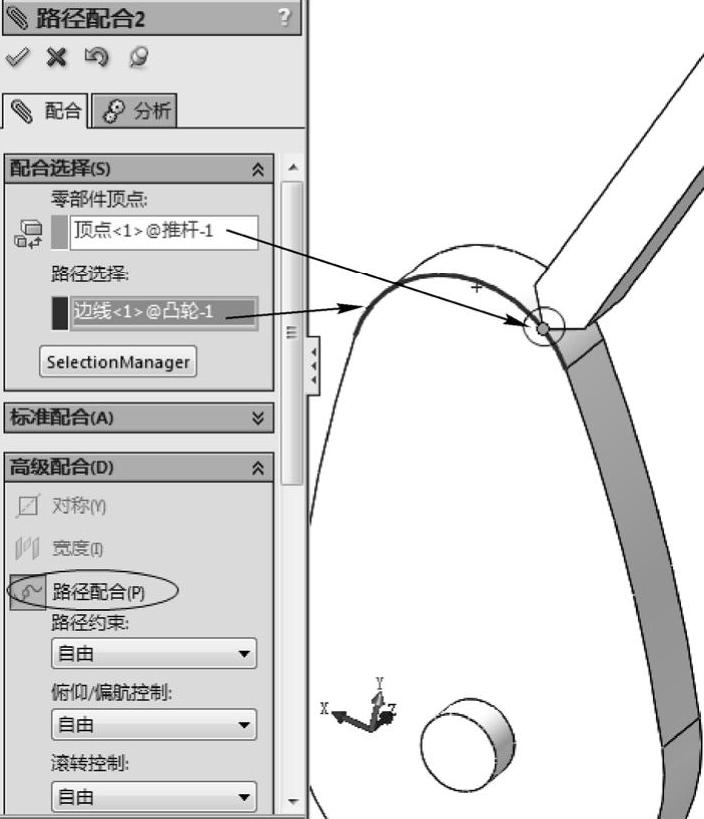
图5-60 路径配合
在路径配合中,还可以对路径约束进行设置。主要设置以下几个参数。
●路径约束:把零部件的顶点约束在路径的某个位置,有“自由”“沿路径的距离”和“沿路径的百分比”三种约束方式。“自由”是允许的顶点在路径的任何位置;“沿路径的距离”是使顶点位于指定距离的位置;“沿路径的百分比”是将顶点约束在用户指定的沿路径百分比的距离处。
●“俯仰/偏航控制”是设置零部件的姿态,有“自由”和“随路径变化”两种方式。“自由”是允许零部件绕着顶点自由旋转;“随路径变化”是使零部件的姿态保持和路径对齐。
●“滚转控制”是控制零部件的滚转,有“自由”和“上向量”两种。“自由”是允许零部件的滚转而不受约束;“上向量”是约束零部件的一个轴以与选取的向量对齐。
(4)线性/线性耦合配合
线性/线性耦合配合是使两个零部件以一定的关系进行线性平移,也就是说,两个添加了线性/线性耦合配合的零件可以以固定的速比进行线性移动。下面以一个例子说明其操作步骤:(https://www.xing528.com)
●单击装配体工具栏中的“配合 ”,弹出如图5-61所示的对话框。
”,弹出如图5-61所示的对话框。
●在“高级配合”中单击“线性/线性耦合 ”。
”。
●在第一个“要配合的实体 ”中选择图中所示的滑块1的面,在“配合实体1的参考零部件
”中选择图中所示的滑块1的面,在“配合实体1的参考零部件 ”中选择导轨。
”中选择导轨。
●在第二个“要配合的实体 ”中选择图中所示的滑块2的面,在“配合实体2的参考零部件
”中选择图中所示的滑块2的面,在“配合实体2的参考零部件 ”中选择导轨。
”中选择导轨。
●在“比率”中输入2:1。
●单击“确定 ”完成配合。
”完成配合。
完成配合后,移动滑块1,则滑块2也会随之运动,而它们移动的速度比例正好是2:1。
(5)距离限制配合
距离限制配合是使两个零部件之间的距离限制在指定的范围。添加该配合时,必须分别指定最大距离和最小距离。下面举例说明其操作步骤:
●单击装配体工具栏中的“配合 ”,弹出如图5-62所示的对话框。
”,弹出如图5-62所示的对话框。
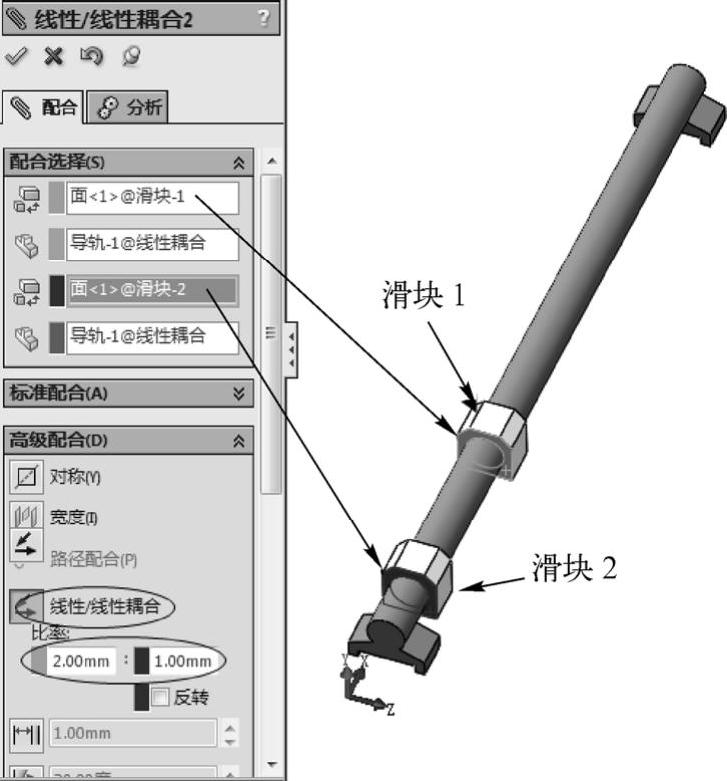
图5-61 线性/线性耦合
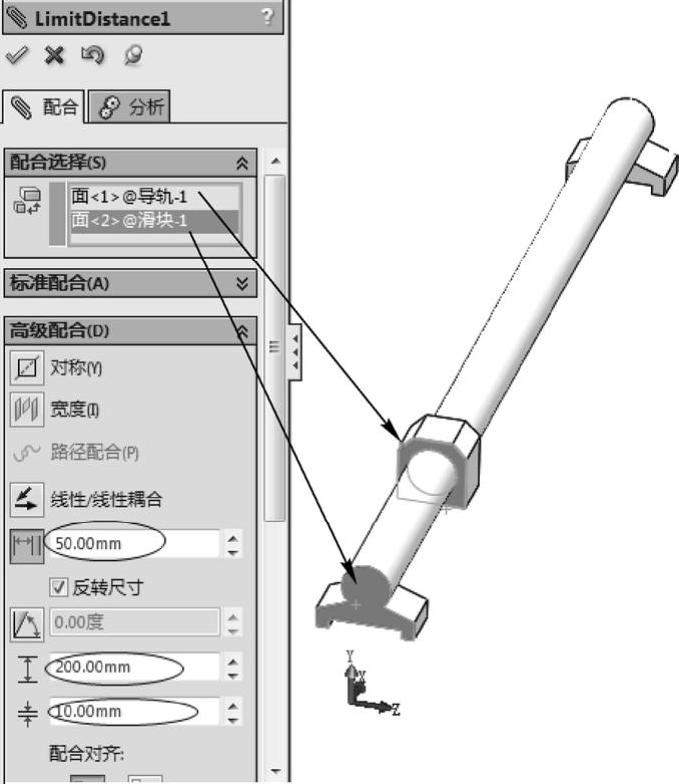
图5-62 距离限制配合
●在“高级配合”中单击“距离限制 ”。
”。
●在“要配合的实体 ”中选择图中所示两个面。
”中选择图中所示两个面。
●在“距离”中输入50,在“最大值 ”中输入200,在“最小值
”中输入200,在“最小值 ”中输入10。
”中输入10。
●单击“确定 ”完成配合。
”完成配合。
添加距离限制配合后,两个零部件之间的原始距离为50,而它们之间的相互运动只能限制在10~200mm之间。
(6)角度限制配合
和距离限制类似,角度限制也是使两个零件的实体限制在一定的范围内。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-63所示的对话框。
”,弹出如图5-63所示的对话框。
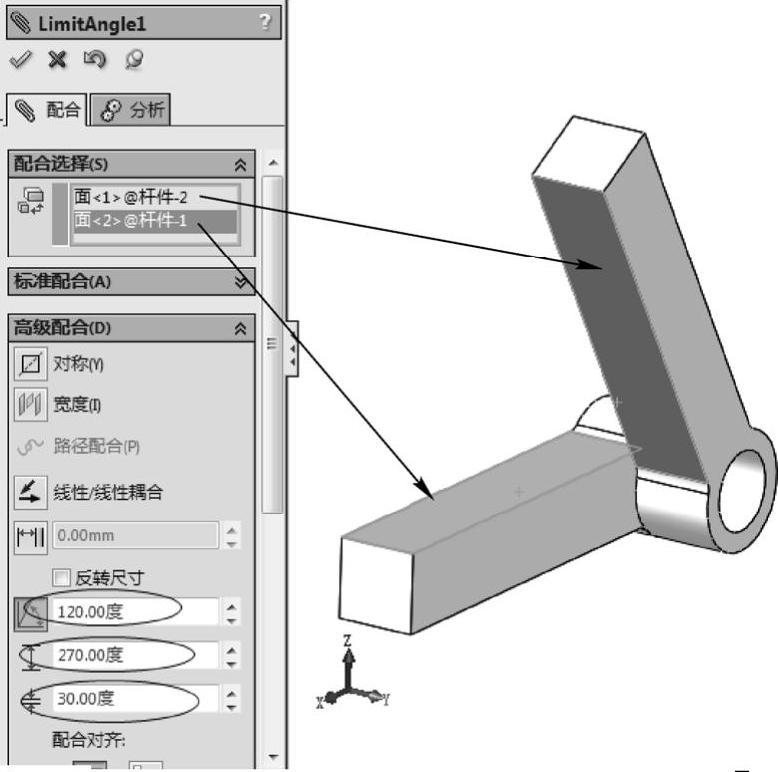
图5-63 角度限制
●在“高级配合”中单击“角度限制 ”。
”。
●在“要配合的实体 ”中选择图中所示两个面。
”中选择图中所示两个面。
●在“角度”中输入120°,在“最大佰 ”中输入270°,在“最小值
”中输入270°,在“最小值 ”中输入30°。
”中输入30°。
●单击“确定 ”完成配合。
”完成配合。
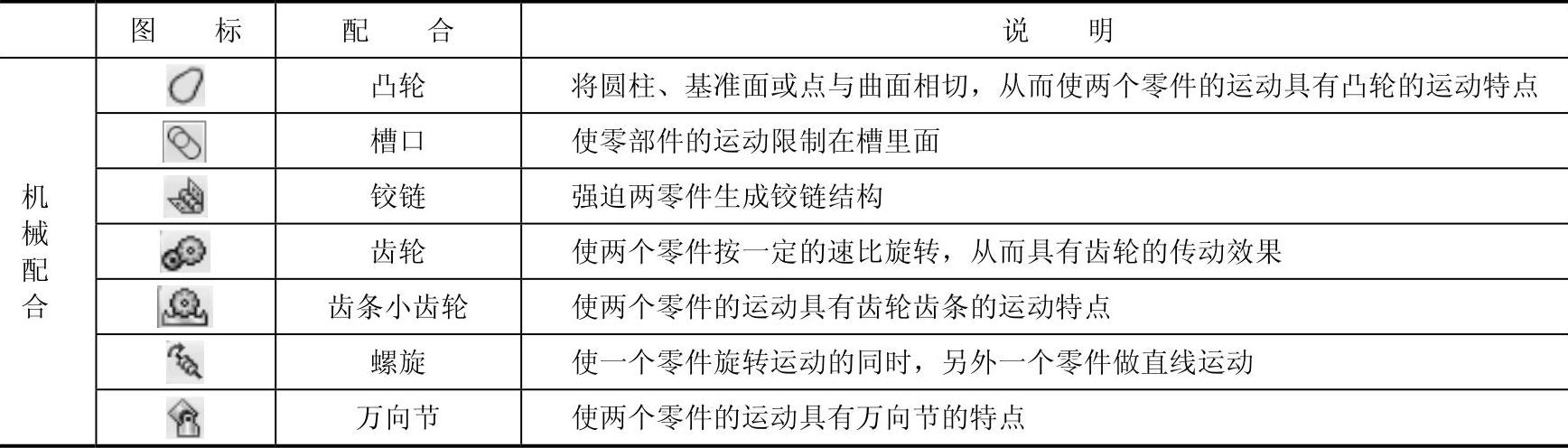
3.机械配合
 ——参见附带光盘中的AVI/ch5/5.1.4.3.avi
——参见附带光盘中的AVI/ch5/5.1.4.3.avi
机械配合是为两个零部件添加特殊的配合,使其运动具有常见的机械结构的运动特点,例如齿轮传动、凸轮运动等特点。机械配合包括凸轮、槽口、齿轮、齿轮齿条、铰链、螺旋、万向节等配合。
(1)凸轮配合
凸轮是机械结构中常用的机构之一,凸轮配合实际上是为两个零部件的实体添加相切配合。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-64所示的对话框。
”,弹出如图5-64所示的对话框。
●在“机械配合”中单击“凸轮 ”。
”。
●在“要配合的实体 ”中选择凸轮的4个外轮廓面。
”中选择凸轮的4个外轮廓面。
●在“凸轮推杆”中选择推杆的圆柱面。
●单击“确定 ”完成配合。
”完成配合。
完成凸轮配合后,绕着凸轮的旋转轴转动凸轮,则推杆也会做直线运动,在这个过程中,推杆和凸轮的配合面始终保持相切。
这里需要注意的是,由于凸轮的轮廓线一定是闭合的曲线,因此在“要配合的实体”中选择的几个面必须是闭合的,否则不能作为凸轮的轮廓面。
(2)槽口配合
槽口配合是使零部件的圆柱面约束与槽口中。使用该配合的时候,可以使螺栓、轴或者圆柱面和槽口配合。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-65所示的对话框。
”,弹出如图5-65所示的对话框。
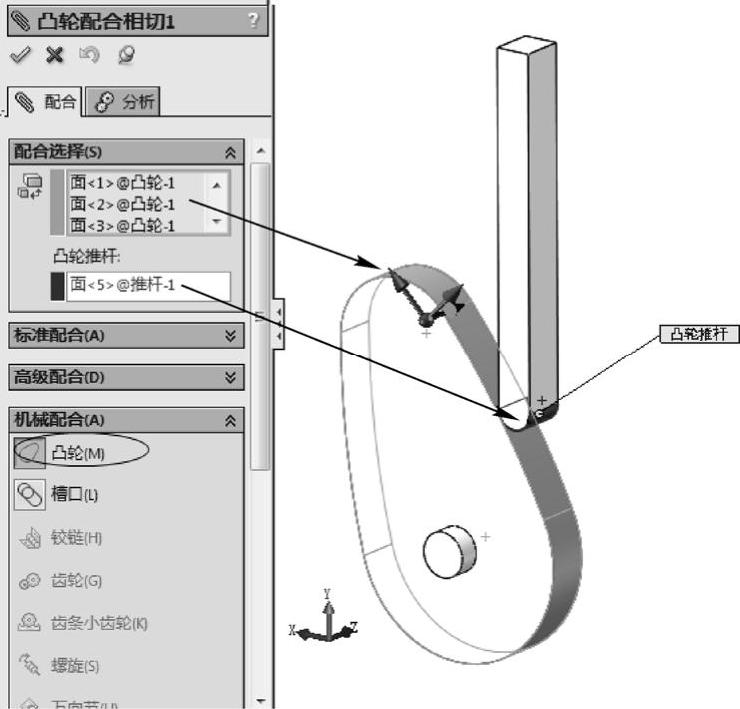
图5-64 凸轮配合
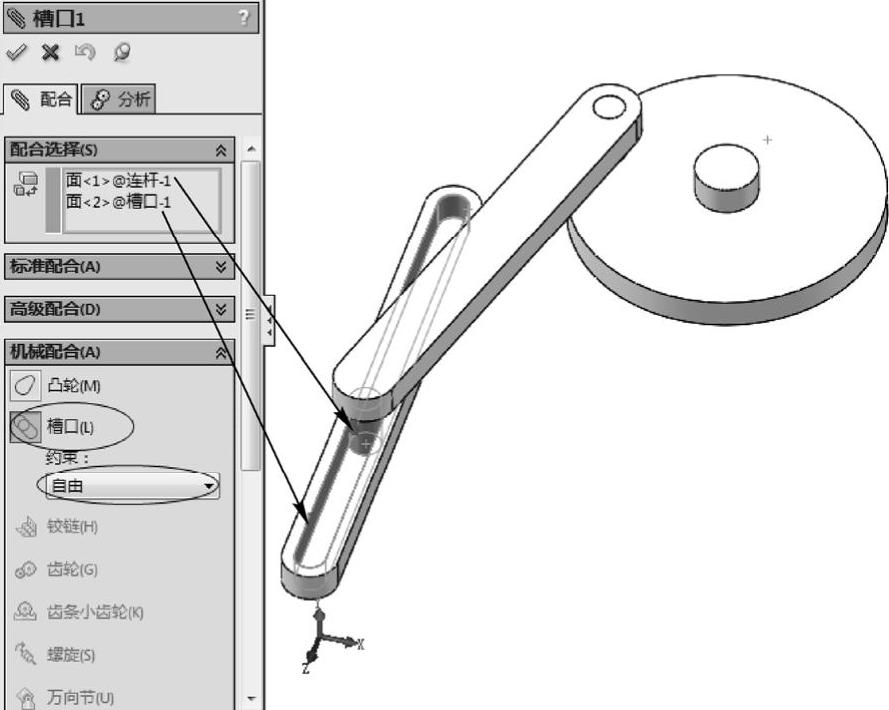
图5-65 槽口配合
●在“机械配合”中单击“槽口 ”。
”。
●在“要配合的实体 ”中选择图中所示的两个面。
”中选择图中所示的两个面。
●单击“约束’:在下拉菜单中选择“自由”。
●单击“确定 ”完成配合。
”完成配合。
完成槽口配合后,连杆和槽口配合的圆柱面只能够在槽口中运动。添加槽口配合时,还可以设置槽口的约束条件,单击“约束”,在下拉菜单中列出以下几种约束条件。
●自由:允许零部件在槽中自由移动。
●在槽口中心:零部件被限制在槽口的中心位置。
●沿槽口的距离:将零部件轴限制在距槽末端指定距离的位置。
●沿槽口的百分比:将零部件轴约束在按槽长度百分比指定的距离处。
(3)铰链配合
铰链配合是将两个零部件之间的旋转运动限制在一定的角度范围内。它实际上相当于同时添加同心配合、重合配合和角度限制配合。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-66所示的对话框。
”,弹出如图5-66所示的对话框。
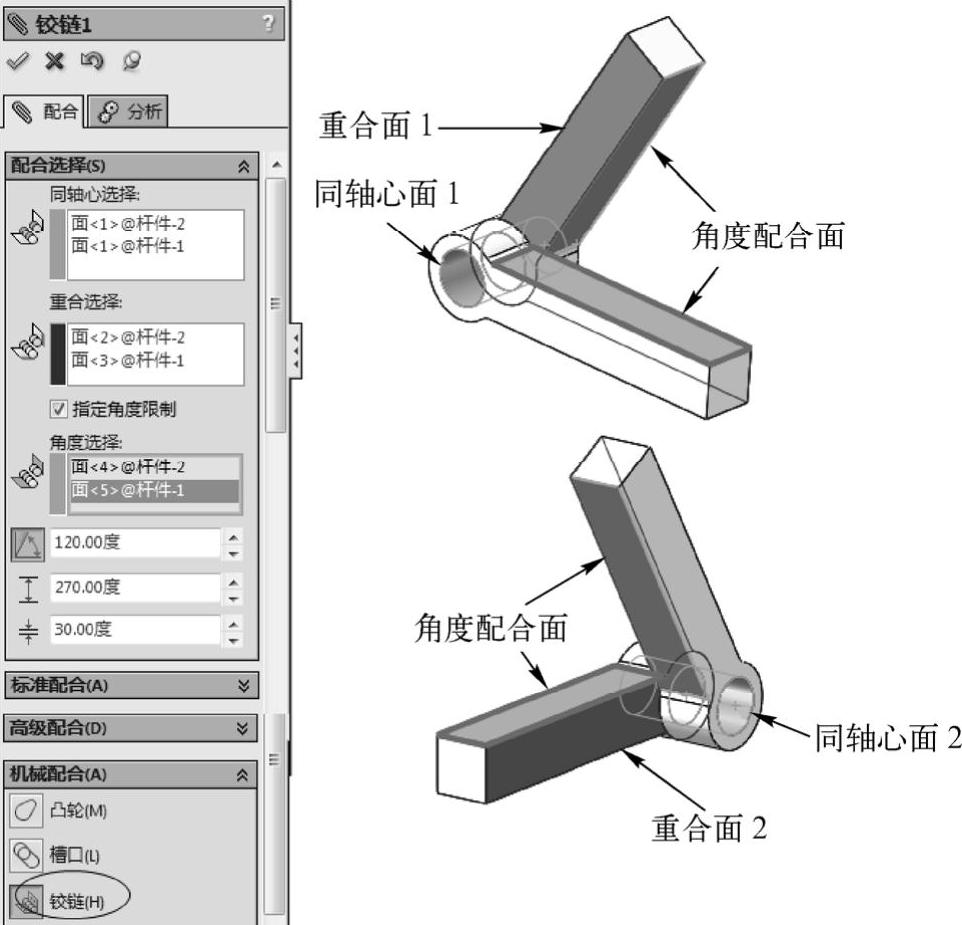
图5-66 铰链配合
●在“机械配合”中单击“铰链 ”。
”。
●在“同轴心选择”中选择图中所示的两个圆柱面。
●在“重合选择”中选择图中所示的两个平面。
●勾选“指定角度限制”,并在“角度选择”中选择图中所示的两个平面。
●在“角度”中输入120°,在“最大值 ”中输入270°,在“最小值
”中输入270°,在“最小值 ”中输入20°。
”中输入20°。
●最后单击“确定 ”完成配合。
”完成配合。
从上面的操作步骤中可以看到,添加铰链配合时,至少要同时添加同心配合和重合配合,而角度限制可以根据需要指定即可。
(4)齿轮配合
齿轮配合是强迫两个零部件以一定的角速度比率,围绕着各自的旋转轴旋转。添加了齿轮配合的两个零部件的运动特点和齿轮的传动特点相同。下面以实例来说明齿轮配合的操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-67所示的对话框。
”,弹出如图5-67所示的对话框。
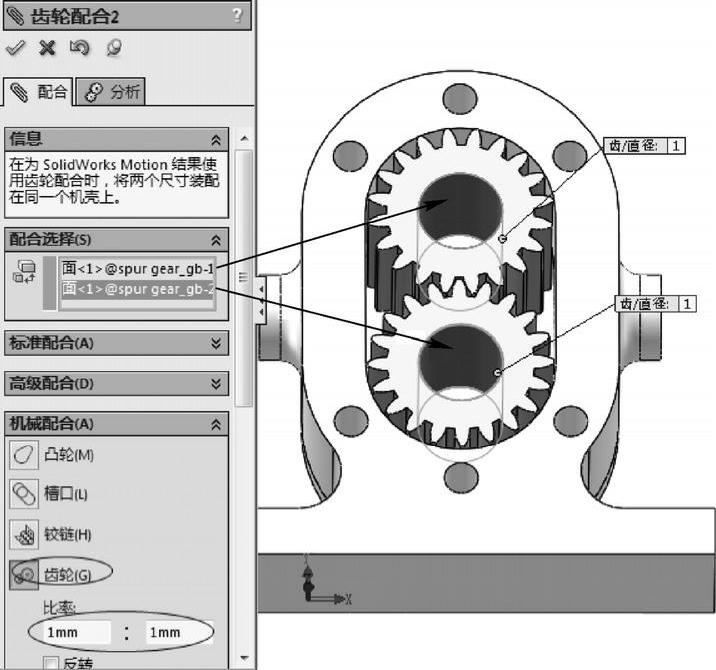
图5-67 齿轮配合
●在“机械配合”中单击“齿轮 ”。
”。
●在“要配合的实体 ”中选择图中所示的两个齿轮内孔的圆柱面。
”中选择图中所示的两个齿轮内孔的圆柱面。
●在“比率”中输入1:1。
●最后单击“确定 ”完成配合。
”完成配合。
这里需要注意的是,进行齿轮配合时,选择配合的实体只是两个齿轮旋转轴,而旋转轴一般是没有齿轮传动比的信息的,因此还需要在“比率”中指定两个齿轮的传动比。
(5)齿条小齿轮配合
齿条小齿轮配合和齿轮类似,也是模拟齿轮传动的一种机械配合。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-68所示的对话框。
”,弹出如图5-68所示的对话框。
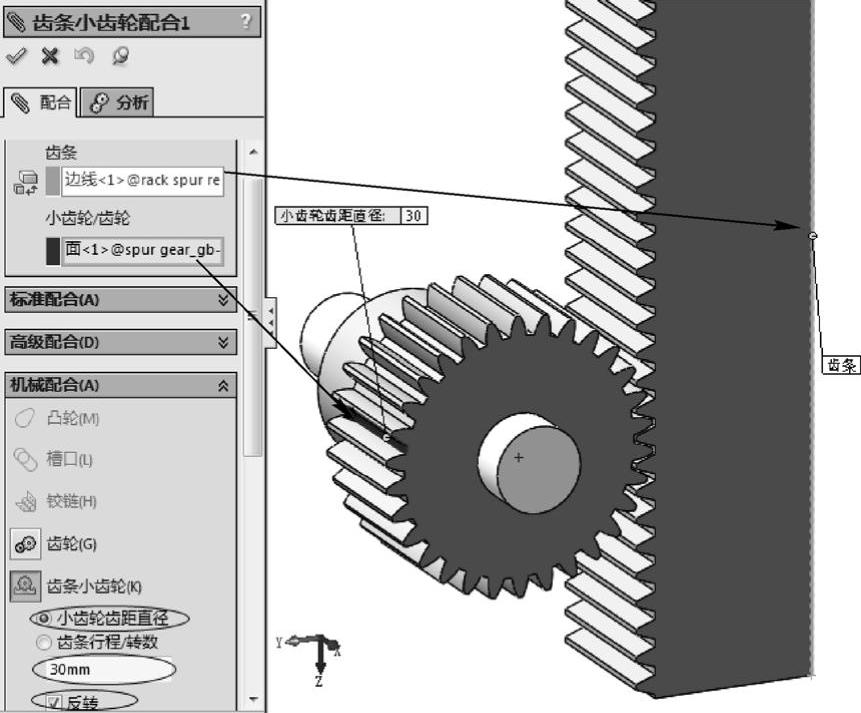
图5-68 齿轮齿条配合
●在“机械配合”中单击“齿条小齿轮 ”。
”。
●在“齿条”中选择图中所示的齿条的边线。
●在“小齿轮/齿轮”中选择图中所示的齿轮的面。
●选择“小齿轮齿距直径”,并输入齿轮的分度圆直径30。
●勾选“反向”。
●最后单击“确定 ”完成配合。
”完成配合。
完成配合后,旋转齿轮,则齿条也随之平移,而移动齿条,则齿轮会随之旋转。这样的运动规律和实际的齿条齿轮运动规律一致。
进行齿轮配合时,可以通过设置“比率”来确定两个齿轮的角速度比率,而在齿条小齿轮配合中也有类似的设置。
●小齿轮齿距直径:设置齿轮的分度圆直径,齿轮每旋转一圈,齿轮平移的距离为分度圆的圆周长。
●齿条行程/转数:设置齿轮每旋转一圈时的齿条平移距离。
此外,还可以通过“反向”来设置齿轮和齿条相对运动时的方向。
(6)螺旋配合
螺旋配合是模拟丝杆的运动特征,即一个零件绕着轴线旋转时,与之配合的零件沿着轴线的方向进行平移。下面举例说明其操作。
●单击装配体工具栏的“配合 ”,弹出如图5-69所示的对话框。
”,弹出如图5-69所示的对话框。
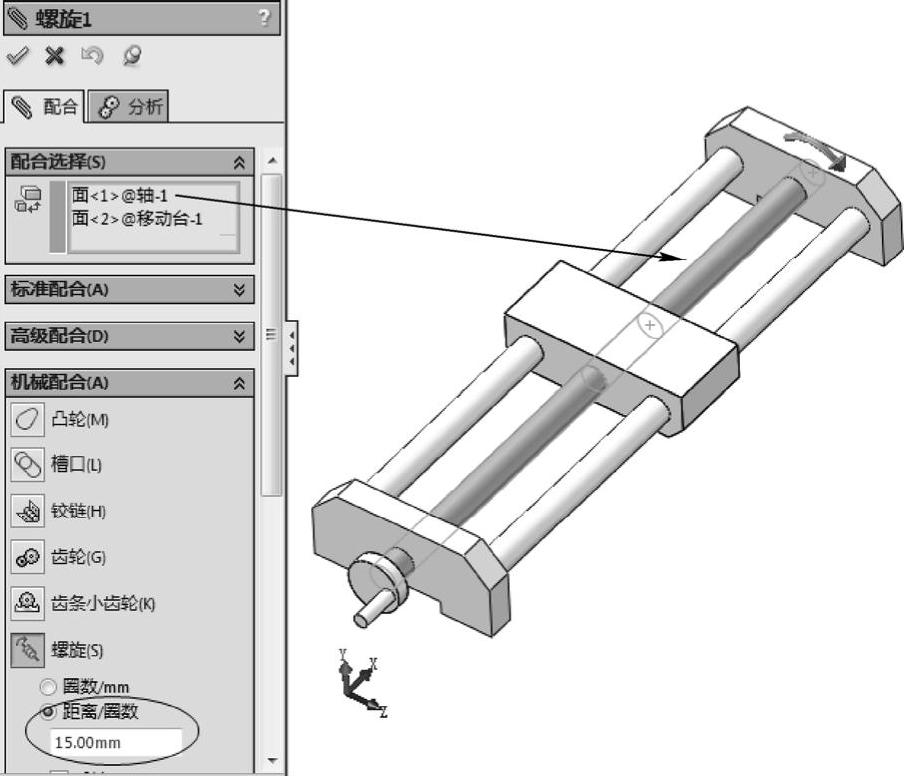
图5-69 螺旋配合
●在“机械配合”中单击“螺旋 ”。
”。
●在“配合选择 ”中选择图中所示的轴的圆柱面和与轴配合的移动台的面。
”中选择图中所示的轴的圆柱面和与轴配合的移动台的面。
●选择“距离/圈数”,并输入15。
●最后单击“确定 ”完成配合。
”完成配合。
完成配合后,旋转轴,则移动台会沿着轴线平移。在这里,移动台移动的速度和轴的旋转速度比率是恒定的。如果选择“圈数/mm”,可以设置移动台每移动1mm时轴转过的圈数;如果选择“距离/圈数”,则设置轴每转一圈时移动台移动的距离。
(7)万向节配合
万向节配合是模拟万向节传动的特点,即两个零件绕着各自的轴做角速度比率为1:1的旋转运动。下面举例说明其操作步骤。
●单击装配体工具栏中的“配合 ”,弹出如图5-70所示的对话框。
”,弹出如图5-70所示的对话框。
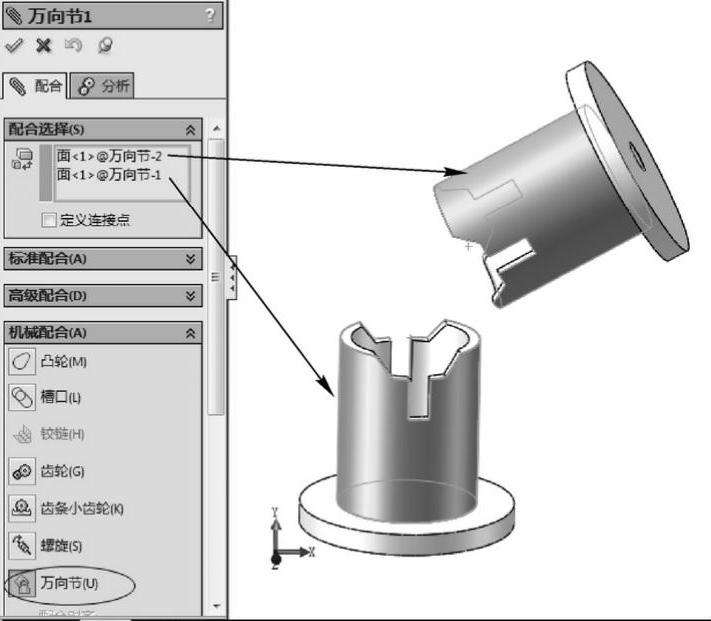
图5-70 万向节配合
●在“机械配合”中单击“万向节 ”。
”。
●在“配合选择 ”中选择图中所示的两个万向节的面。
”中选择图中所示的两个万向节的面。
●最后单击“确定 ”完成配合。
”完成配合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。