



1.硬件组成
单片机芯片U1作为控制核心,由反射式红外对管U4采集电动机转动信号,经U5作脉冲整形后送入U1作运算处理,输出的分钟转数(从个位到千位)送至4位一体共阴极数码管U6作显示,其中由7段硬件译码芯片U2作段驱动,由电流驱动器芯片U3作动态位驱动;独立开关Q用来启动测量过程。非接触式的电动机转速测定电路见图8-32。
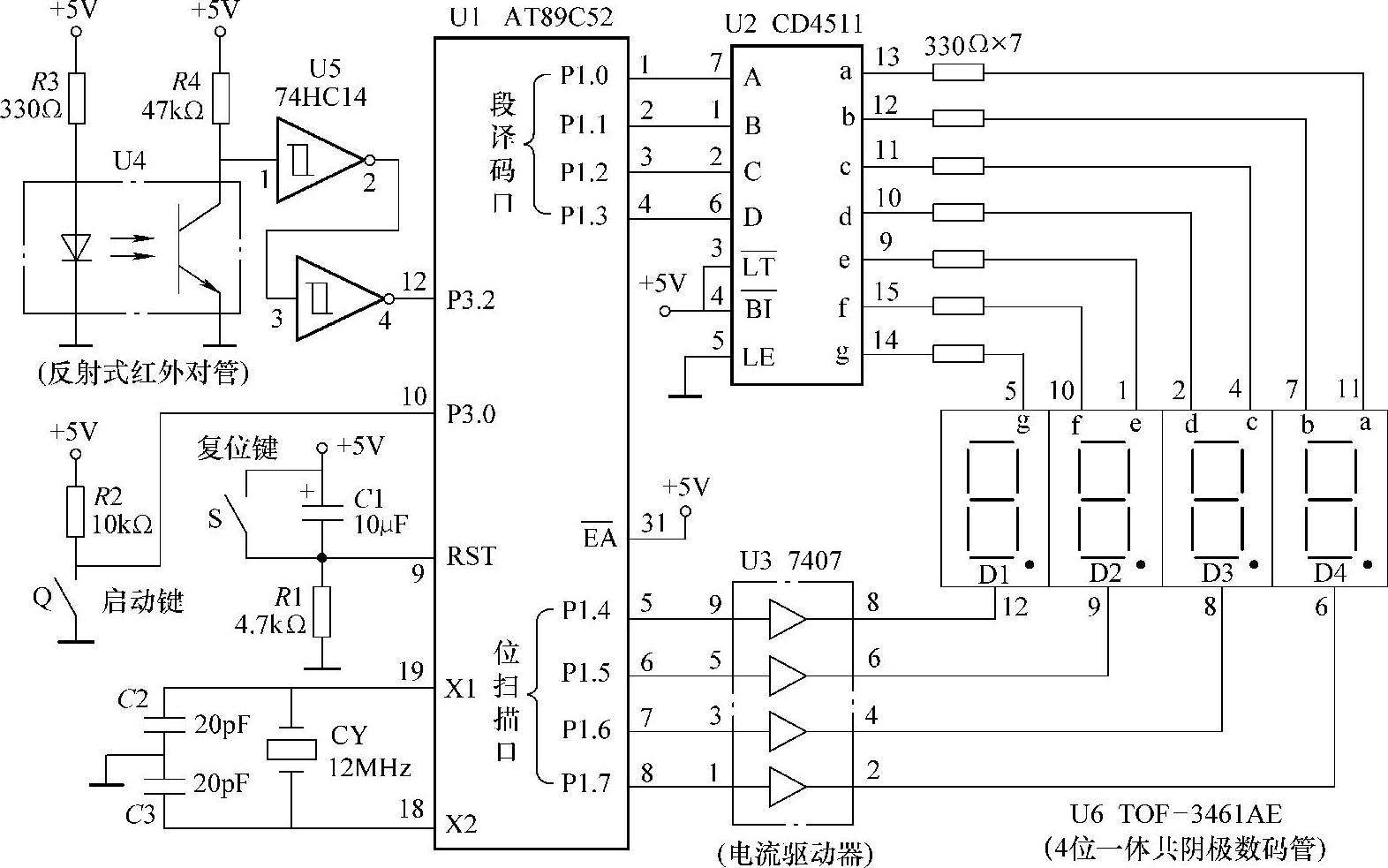
图8-32 非接触式的电动机转速测定电路
2.电路原理
在图8-32所示电路中,电动机转动时白光栅反射的红外信号经反射式红外对管U4的光电管接收,输出低电平脉冲信号,经两单元级联的施密特反相器U5整形后的脉冲信号送入单片机U1的外中断口P3.2,当按下启动键Q,脉冲下降沿便启动U1的外中断服务程序,执行1s的定时计数和1min的换算处理。分钟转数的测量结果以动态扫描方式显示,其中以4位BCD码从U1的段译码口送出,经7段锁存/译码/驱动芯片U2作硬件译码,送至4位一体共阴极数码管U6作为段信号,U1的位扫描口逐位送出低电平信号,经电流驱动器U3作显示位驱动。
3.主要器件(https://www.xing528.com)
电动机光栅转盘采用直径约7cm的薄铝片作为白光栅基底,其上均匀贴上约6mm宽的12条黑胶布作为黑光栅。U4为反射式红外对管RPR220或ITR20001,U1为单片机芯片AT89C52,U5为施密特反相器74HC14(内含6个独立单元),U2为“7段锁存/译码/驱动器”CD4511,U3为电流驱动器7407,U6为共阴极数码管TOF-3461AE。非接触式的电动机转速测定电路装置见图8-33,非接触式的电动机转速采样图见图8-34。
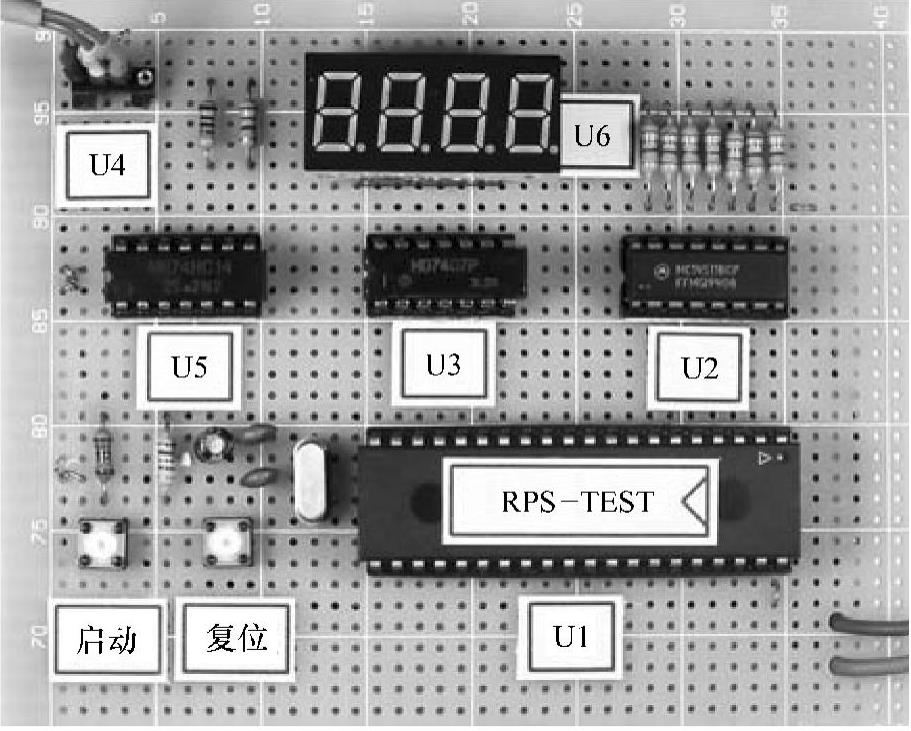
图8-33 非接触式的电动机转速测定电路装置
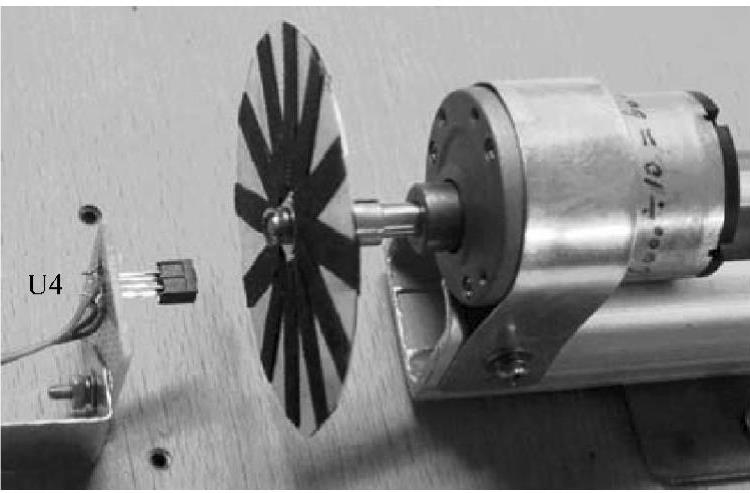
图8-34 非接触式的电动机转速采样图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。