



当删除在位配合时,在出现确认对话框后将会出现一条警告信息:“在装配体中用在位配合所放置的零件基本草图包含有对其他实体的参考,此配合方式删除后,因为此零件将不再相对于装配体被放置,因此这些参考可能会以不预期的方式做更新,请问是否现在消除这些参考?(不会删除任何几何体)。”
如果单击【否】,只会删除在位配合关系,不会删除参考(包括外部参考),如图1-30所示。
如果单击【是】,在位配合和所有的外部参考将都被删除,如图1-31所示。
这些选项对删除外部参考很有帮助。
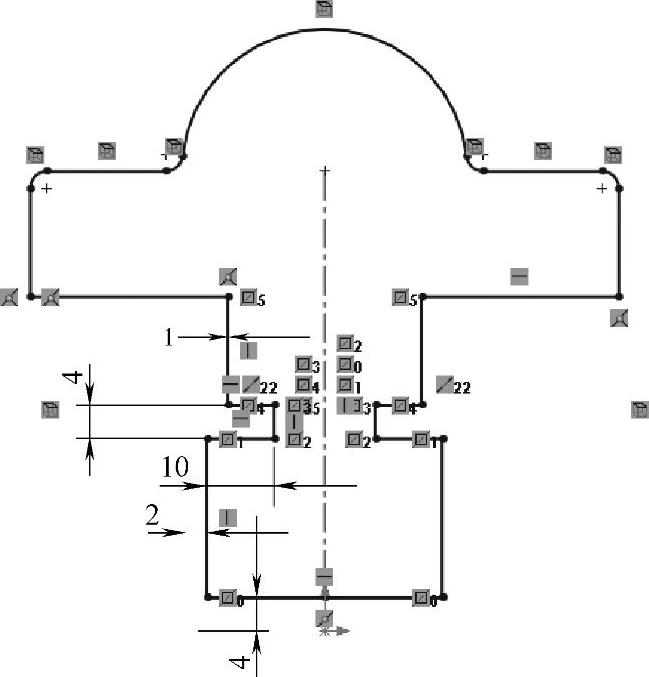
图1-30 不删除参考
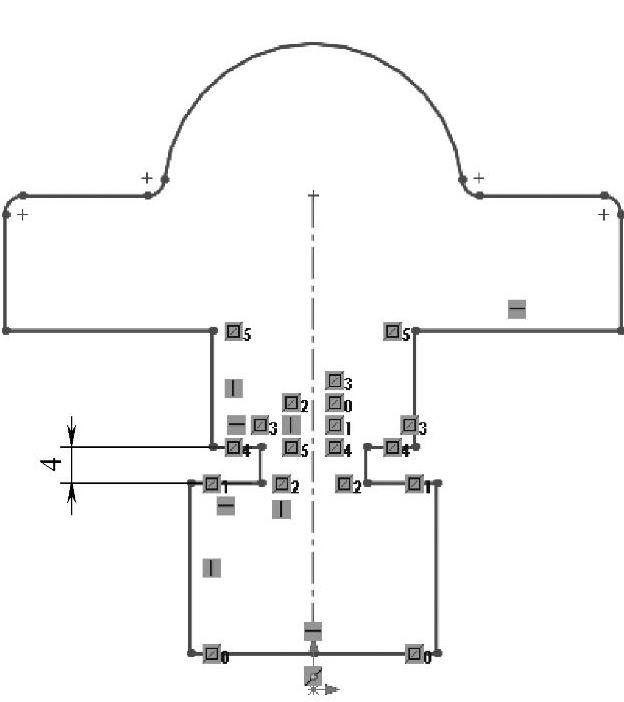
图1-31 删除参考
步骤39 删除在位配合
选择Sliding_Jaw零件,单击右键在菜单工具栏中选择【查看配合】 /【删除】在位配合。
/【删除】在位配合。
由于仍然想保留外部引用,因此在弹出的消息框中单击【否】。关闭零件的【查看配合】对话框。
步骤40 添加配合
现在,可以安全地移动Sliding_Jaw并重新应用配合。由于引用当前被锁定,特征就不会因其引用的几何变化产生更新。(https://www.xing528.com)
添加配合来定位零件Sliding_Jaw,同时仍允许其适当自由地移动。一个解决办法是添加同心配合(图1-32)和平行配合(图1-33)。
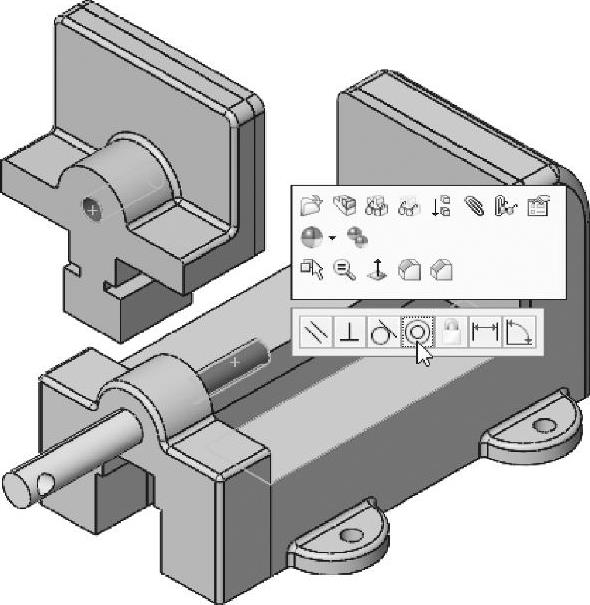
图1-32 添加同心配合
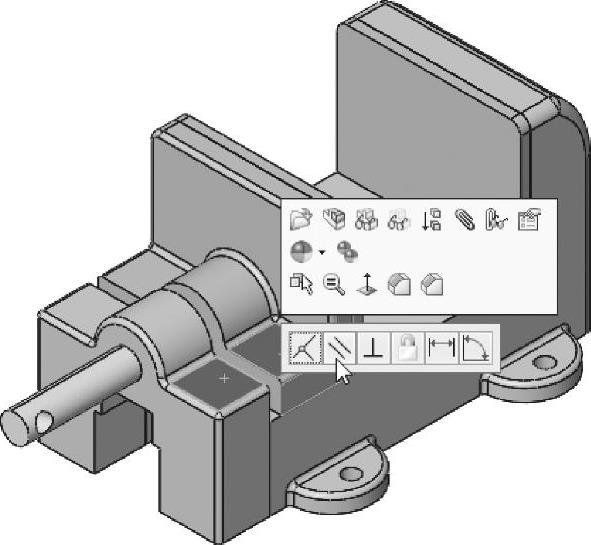
图1-33 添加平行配合
步骤41 全部解除锁定
在FeatureManager树上右键单击Sliding_Jaw,然后选择【列举外部参考】。在外部参考的对话框上单击【全部解除锁定】并单击【确定】。现在零件便可以对引用的几何体作任何更新了。
步骤42 螺旋配合
为完成在装配预期的运动,此处将模拟Vise_Screw组件的螺旋运动。
单击【配合】 并展开【机械配合】选项框,然后单击【螺旋】
并展开【机械配合】选项框,然后单击【螺旋】 ,圈数选择0.5mm,选择“Vise_Screw”的圆柱面并通过【选择其他】工具选择“Base2”的圆柱面,然后单击【确定】,如图1-34所示。拖动Vise_Screw打开或关闭台虎钳。
,圈数选择0.5mm,选择“Vise_Screw”的圆柱面并通过【选择其他】工具选择“Base2”的圆柱面,然后单击【确定】,如图1-34所示。拖动Vise_Screw打开或关闭台虎钳。
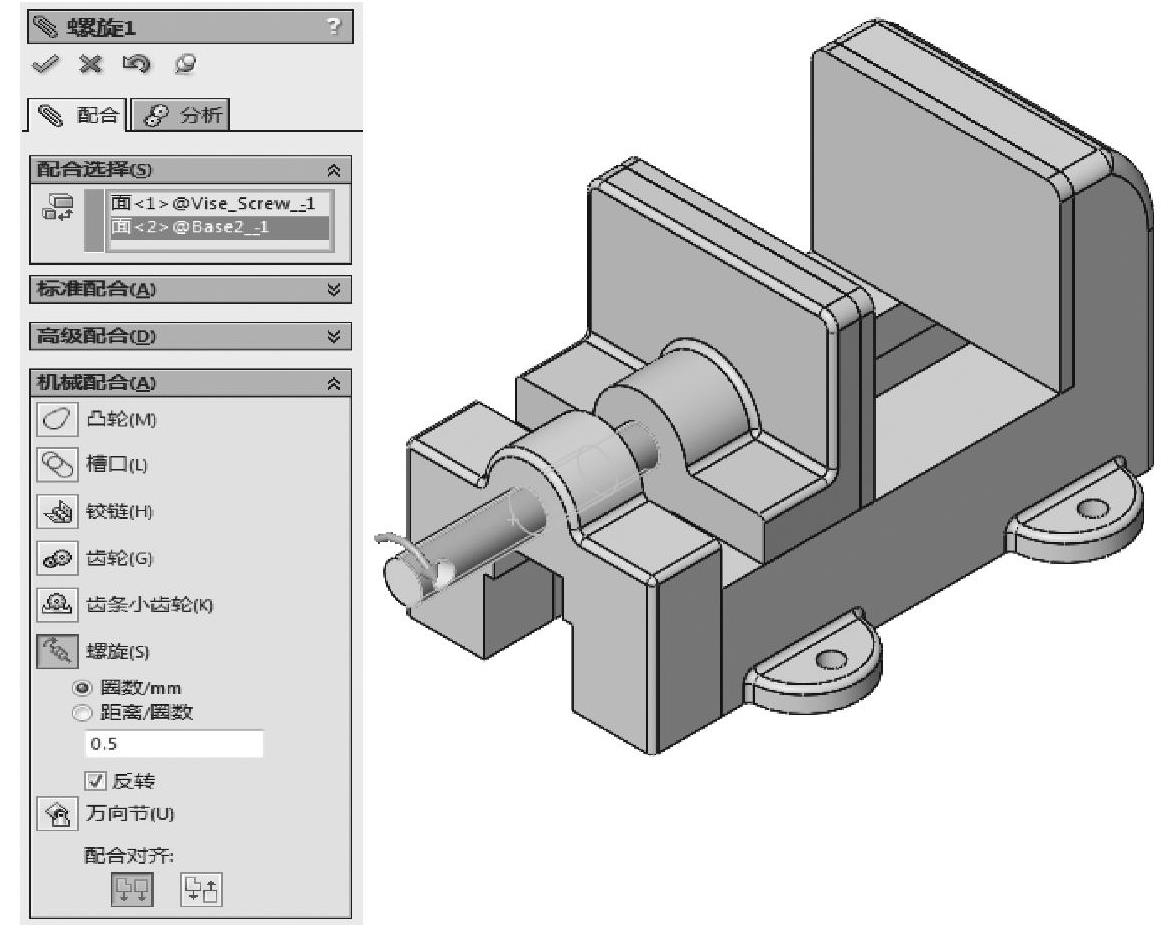
图1-34 添加螺旋配合
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。