



如图10.4所示,声学信号的振幅的变化是变形最常见的例子。干扰发生后,喷射像往常一样进行。但有时干扰发生后,有气泡留下来,后来变成更大的可见的声学信号的偏差。然后,还有可见的干扰液滴形成[19],最后甚至会导致完全崩溃的液滴形成过程[20,21]。当墨水层厚度居于临界值时,润湿本身也会导致喷嘴夹杂空气[18]。因此实现最大的稳定喷射的关键是抑制气泡的生成和控制气泡的行为。
不只是液滴形成、补充、喷嘴板的润湿、污垢粒子均可以改变声压波的反射,并且一个气泡对喷嘴的压力波也是有很大影响的。声学测量监控喷射的稳定性[18]。应用声学测量,只有声学反应可以测量。带入空气时,变形后喷墨信号的振幅越来越大,偏离其标称值。如图10.5所示,增加或减少的幅度表明某些情况正在发生。在20kHz的重复频率时,在这个试验中使用的打印头是在100个液滴为形成周期时,变化偏差超过10%的。
首先,在Rayleigh-Plesset方程所描述的声场中泡沫将振荡[22]。泡沫的振荡本身并不是记录为声学信号的干扰,但是会改变压力波的反射。因此,墨水的声学属性将作为一个声学测量的过滤器[2]。在170kHz的变形会影响到气泡,因为这个频率在50kHz时靠着基本共振频道,打印头在这个试验中使用下一个大的峰值频率特性。频率特性作为一个声学测量的过滤器,描述电动执行器的活动和弯液面运动与行为之间的关系。高频组件在压力反射条件波下对小的变化更敏感,因此比低频组件改变得更多。
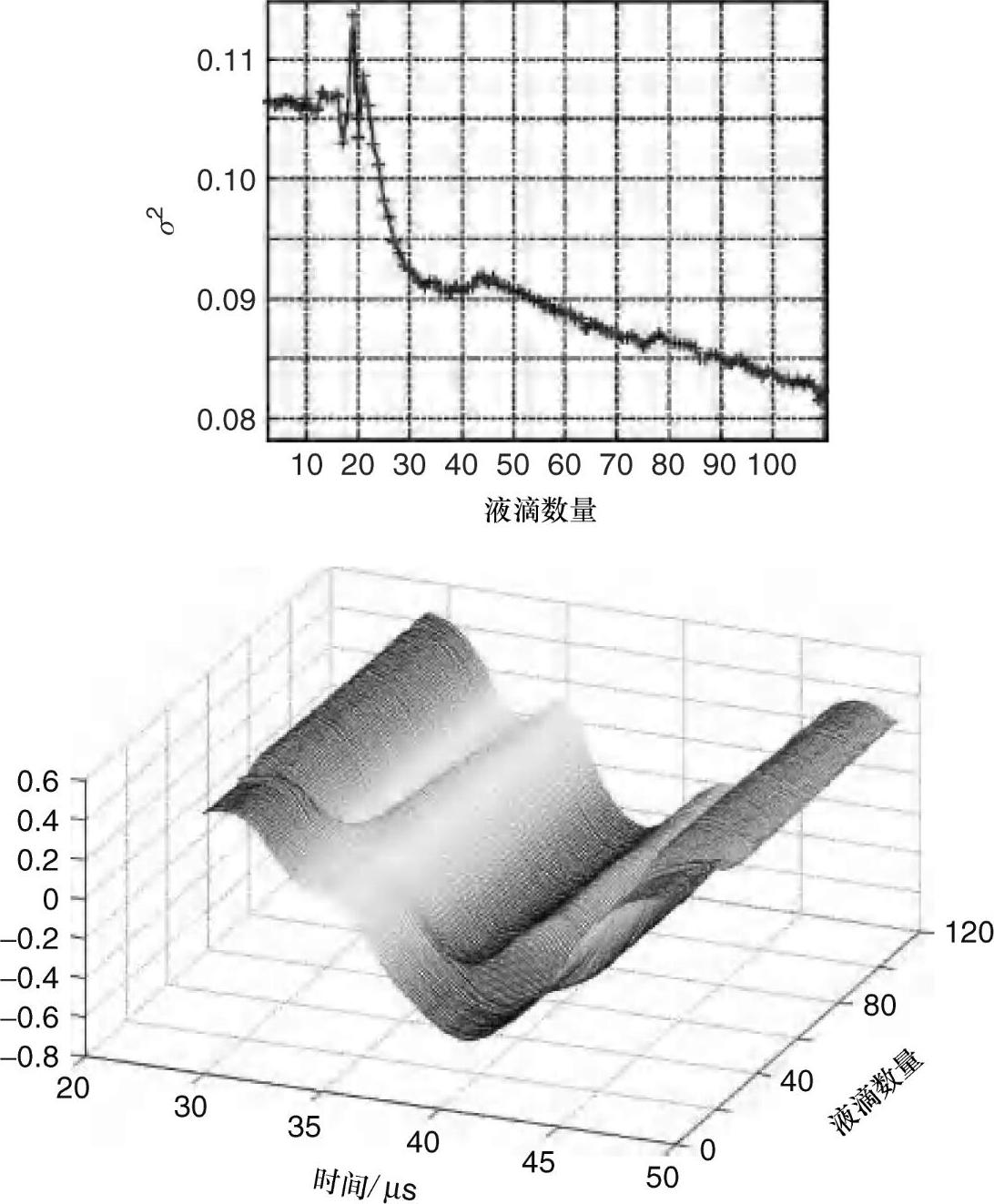
图10.5 声学信号的振幅在循环前20次发生变形并且空气被带入。在20kHz的重复频率时,100个液滴形成周期的声学信号的振幅偏离超过10%。右边显示的是一个气泡被 带入后声学信号的发展。z轴是信号的振幅。
许多力作用于声压场气泡。气泡的运动是由声波和流体之间的力决定的[23],这些声学和流体力将导致复杂的运动模式。此外,当声压变化足够强时声压区域里的气泡增长[22]。在压力最大值,空气挤出气泡。但当气泡扩张时,损失是在压力最小值时过补偿。这导致纯净气体扩散到气泡。调整过的扩散导致表面效应和壳效应,例如,一个膨胀的气泡由于其较大的表面积可以吸收更多的空气和更高浓度的梯度溶解气泡,气泡周围的液体会被膨胀的气泡压扁。
气泡尺寸快速增加,在1000~5000驱动周期后保持平衡尺寸饱和[2]。气泡的溶解速度可由调整过的扩散的增长来平衡,气泡在主要驱动周期溶解。越来越多的气泡将越来越影响墨水通道的声学特性,如图10.5所示,可见的墨水信号的偏差越来越大。在平衡时,气泡体积总量相当于声压力波的位移。声压场的位移量现在可以抵消气泡尺寸的变化。喷嘴里的墨水没有运动的驱动力,液滴形成也没有结束的驱动力,这也将完全改变通道的声学特性。(https://www.xing528.com)
没有气泡,喷嘴作为墨水通道内的压力波部分封闭的边界条件。用于这些试验的打印头的通道将作为一个 λ共振器。一个大气泡可以抵消压力积聚。这导致一个完整开放的反射。现在通道将作为
λ共振器。一个大气泡可以抵消压力积聚。这导致一个完整开放的反射。现在通道将作为 λ共振器。主要的共振频率将会增加并且压力波的振幅也会增加。这是可见的声学信号,如图10.6a所示。
λ共振器。主要的共振频率将会增加并且压力波的振幅也会增加。这是可见的声学信号,如图10.6a所示。
开发的数值模型,能够用来非常准确地描述这种影响[24]。这个模型是在墨水偏差的基础上推算气泡的大小和位置,图10.6b所示。试验验证有特殊的透明打印头可直接光记录气泡[25]。听觉上推算的气泡体积偏差与直接光测量气泡体积相比小于12%。
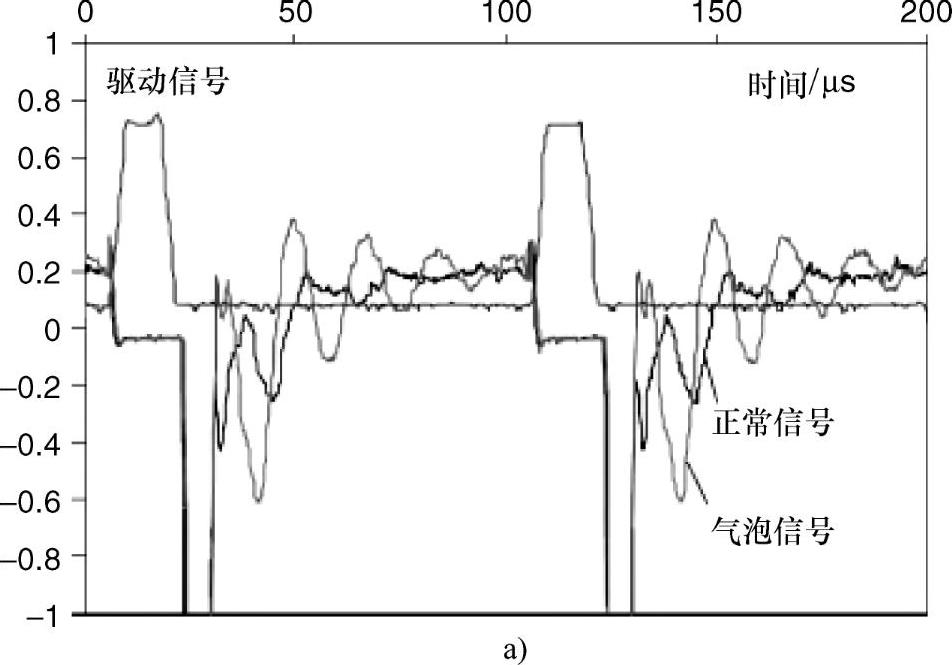
图10.6 a)墨水信号大气泡的测量效果。一个大气泡作为压力的一个开放的边界条件。通道的声学性质转换为更高频率的1/2λ共振器。
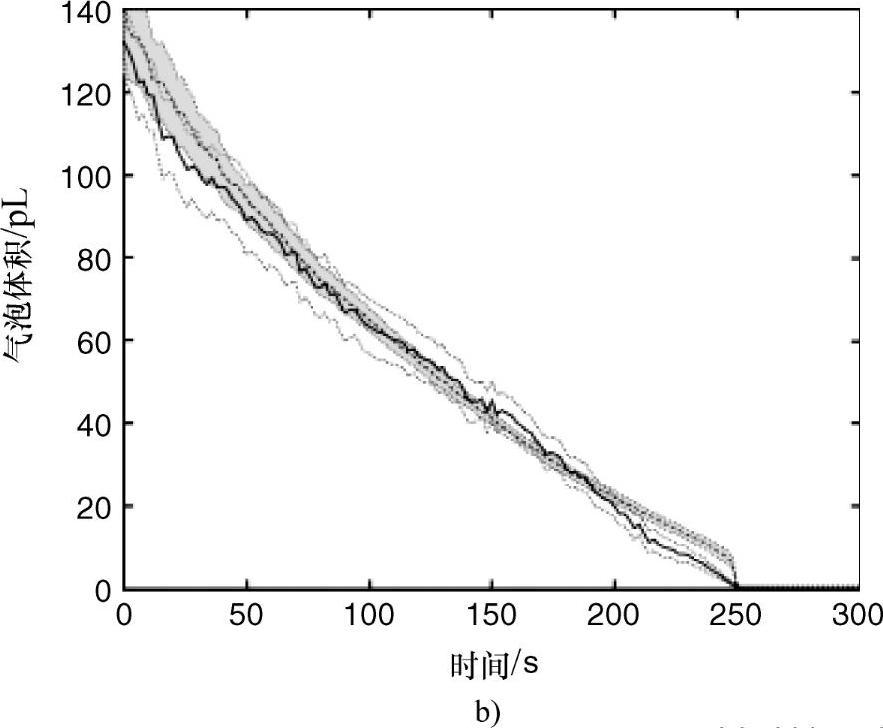
图10.6 b)直接光测量气泡体积(实线白色区域表明误差的边界)和气泡体积由声学信号模型而来(灰色区域的虚线表示误差的边界)(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。