



当模型建好后,下一步就是给结构加载为求解作准备,为了能正确地模拟结构的响应,就必须定义与指定时间间隔相对应的载荷。
与许多隐式分析不同的是,显示分析中的所有载荷必须与时间有关。因此,在ANSYS/LS-DYNA中,许多标准的ANSYS命令都是无效的。在ANSYS/LS-DYNA中,尤其不能使用F,SF,BF系列命令,因为它们只能定义与时间无关的载荷。此外,D命令只能定义节点约束。基于上述原因,在ANSYS/LS-DYNA中用一对数组参数定义载荷(一个用来定义时间,另一个定义载荷)。
注意,虽然节点加速度(Ax,Ay,Az)和节点速度(Vx,Vy,Vz)以自由度出现,但它们不是物理自由度,不能使用D命令约束。要采用EDLOAD命令给这些节点施加载荷。
在ANSYS/LS-DYNA中,所有载荷都是在一个载荷步内施加的。这和隐式分析有很大的不同,它在多个载荷步内施加载荷。在ANSYS/LS-DYNA中,对于一些特定的载荷,也可以用EDLOAD命令指定何时施加(birth time)、何时去除(death time)。请参考EDLOAD命令中的Birth Time,Death Time和CID,检验birth/deathtime的适用性。
给模型施加载荷,需遵循以下步骤:
1)把模型中受载的那部分定义成Component(或PART,用于刚体)。
2)定义包含时间间隔和载荷数值的数组参数。
3)定义载荷曲线。
4)如果不是在整体坐标系中加载,需要用EDLCS命令定义载荷方向。
5)模型加载。
除给刚性体加载外,显式分析中所有载荷都施加到Component上。因此,第一步就是把模型中受载的那部分组合成Component,每个Component应由模型中承受同样载荷的部分组成。并且可以通过材料本构、模型中位置、预期状态等联系在一起。
例如,想要分析一个棒球撞击到墙上的结果,可以定义球上的节点为一个Component,球棒上的节点为另一个Component,墙上的节点为第三个Component。
可以定义任意多个Component,然后给每一个Component加载,Component必须由节点或单元组成(只有当施加压力载荷时Component才由单元组成)定义Component时,首先要选择Component中想要包含的部分,然后使用GUI中的下列菜单路径来定义Component(CM):Utility Menu>Select>Comp/Assembly>Create Component。
对于刚性体,载荷一般都施加到PART号上,而不是Component上。这是因为当使用命令EDMP,RIGID,MAT定义刚性体时已经包含有一系列节点和单元。
值得注意的是,显式动态分析中,载荷在一些特定时间间隔内施加到结构上,这样就可以观察在特定时间段里施加载荷后模型的瞬态行为。因此,不仅需要定义施加载荷的类型(FX,FY,FZ,ROTX,ROTY,ROTZ等),同时也需要定义载荷施加到结构上的时间间隔值。
时间间隔值和其相对应的载荷值组合在一起定义为数组参数。这些参数必须定义为两部分,第一部分为时间间隔值,第二部分为载荷值,载荷应与时间间隔相对应。在GUI中,采用菜单路径来定义一个数组参数:Utility Menu>Parameters>Array Parameters>Define/Edit.
注意,可以通过线性插值得到中间时间点的载荷值。指定时间范围外的载荷值不能由程序插入。因此,必须保证载荷时间范围至少等于求解时间。否则,由于过早的去除载荷求解结束时的结果将会变为无效值。
一旦定义了能代表载荷的数组参数,这些载荷与时间有关,就可以直接用EDLOAD命令输入参数定义载荷。或者,可以用EDCURVE命令输入参数来定义载荷曲线。相对应的载荷曲线ID可用EDLOAD命令输入。
一旦定义好Component和数组参数,就可以给建立的模型加载(EDLOAD命令)。在GUI中,可以选择下列菜单路径:Main Menu>Solution>Loading Options>Specify Loads。
可以选择增加载荷(EDLOAD中ADD标号),如力、力矩、节点加速度、表面压力等,所有的载荷都用EDLOAD命令施加到整体笛卡儿坐标系上,此为其默认值。
GUI的对话框将列出所有有效载荷,以及先定义好的Component和数组参数。只需简单地选择所需的载荷标号,以及Component(刚体的PART号)和数组参数集合(预先定义的载荷曲线号)。值得注意的是,并不是所有的载荷标记都适用于所有Component或PART号。
以下的载荷标记只适用于节点Component。
●力:FX,FY,FZ。
●力矩:MX,MY,MZ。
●位移:UX,UY,UZ。
●转角:ROTX,ROTY,ROTZ。
●速度:VX,VY,VZ。
●节点加速度:AX,AY,AZ。
●体加速度:ACLX,ACLY,ACLZ。
●角速度:OMGX,OMGY,OMGZ。
●温度:TEMP。
虽然V(X,Y,Z)和A(X,Y,Z)作为DOFs出现,它们实际上不是物理DOFs。然而,这些量是被计算作为DOF求解和存储以用于后处理。
以下的标记只适用于刚性体(部件号)。
●力:RBFX,RBFY,RBFZ。
●力矩:RBMX,RBMY,RBMZ。
●位移:RBUX,RBUY,RBUZ。
●转角:RBRX,RBRY,RBRZ。
●速度:RBVX,RBVY,RBVZ。
●角速度:RBOX,RBOY,RBOZ。
以下标记只适用于单元Component:
●压力:PRESS。
除了施加载荷外,也可以用EDLOAD,LIST和EDLOAD,DELE来显示和删除载荷。用EDFPLOT命令也可以显示单元上的载荷标号,并且可以用EDPL命令绘制载荷曲线。
用EDCURVE命令定义的数据曲线广泛应用于ANSYS/LS-DYNA中。它们可以用来定义与显式动态材料模型有关的材料数据曲线(如应力-应变)和载荷数据曲线(力-偏转)。它还可以定义时间载荷曲线(力,位移,速度等)。这些载荷曲线可以用EDLOAD命令输入。
某些材料模型(如TB,PLA W或TB,HONEY)要求指定材料特性数据,它们可能是有效应变速率、塑性应变或体积应变的函数。对于这些数据,在用TBDATA命令定义材料特性之前,需用EDCURVE命令定义特性曲线。在刚性体和压延筋接触问题中,也采用数据曲线来定义变形特性。
与对Component加载类似,数据曲线组合成数组参数,然后与特定的曲线参考号相联系,这个参考号可用于指定的材料模型(PLAW,HONEY等)或接触类型(RNTR,ROTR)和压延筋。定义数据曲线可以分为以下几个步骤:
1)定义一个包含材料或摩擦力特性横坐标的数组参数(如,有效塑性应变、有效应变率、位移等)。
2)定义第二个数组参数,包含材料特性或摩擦力的纵坐标值(如,初始屈服应力、弹性模量、力等)。
3)定义数据曲线(EDCURVE)。选择一个数据曲线ID号,产生TBDATA时将采用这个数据曲线ID号来将这些数据与特定的材料特性相联系。
定义这些参数后,在GUI中采用下列路径定义数据曲线。
●MainMenu>Preprocessor>MaterialProps>CurveOptions。
●MainMenu>Solution>LoadingProps>CurveOptions。
可以用EDCURVE,LIST显示数据曲线,用EDCURVE,PLOT绘制曲线,用EDCURVE,DELETE删除曲线。
在开始求解之前,需要给模型施加约束。另外,还可能给运动物体设定初始速度。
与ANSYS(隐式)不同,ANSYS/LS-DYNA区分零约束与非零约束。非零约束如载荷处理(伴随着载荷曲线,见本章前面的讨论)。仅零约束才能使用D命令,也就是说,给定的值必须总是零。其他值无效,D命令仅用于固定模型的某些部分。可以用零约束来实现对称/反对称边界条件。
用户可以用EDNROT命令在旋转节点坐标系中施加零载荷。但首先需用EDLCS命令定义局部坐标系。
当模拟几何体的小对称部分时,需定义滑移或循环对称。可以使用EDBOUND命令来定义滑移或循环对称的对称边界面。可以用节点组元确定边界或方向矢量来定义法向(滑移对称)或旋转轴(循环对称)。
在ANSYS/LS-DYNA中,可以用EDCNSTR命令模拟其他类型的约束。可用的约束类型有附加节点设置(ENS),节点刚性体(NRB),薄壳边界到实体(STS),以及铆接(RIVET)。在GUI中,可以通过路径MainMenu>Solution>Constraints>Apply>AdditionalNodal施加这些约束。
附加节点设置约束类型(EDCNSTR,ADD,ENS)允许在一个已经存在的刚性体上增加节点(通过节点组元),这个刚性体是用EDMP命令定义的,该节点组元不能和其他任何刚体连接在一起。在刚体上附加的节点可以放置在模型的任何地方,并且可放置在初始刚体外。ENS选项有许多应用,包括在两个刚体结合的地方设置节点,定义施加节点载荷的节点,还可在指定的位置定义集中质量。
不像用EDMP命令定义的典型刚体一样,用EDCNSTR,ADD,NRB命令定义的节点刚体不是和一个部件号相联系,而是与一个节点组元有关。当模拟刚性连接(焊接)时,NRB选项是非常有用的。对于一个刚性连接,不同柔性组元(有不同的MATIDs)的部分作用在一起形成一个刚体。所以说很难用一个单一的MATID(和相应的部件号)来定义这种类型的刚体。但是,用一个节点刚体很容易定义刚性连接。因为节点刚体不是和一个部件号相联系,所以使用刚体(如用EDLOAD命令施加的载荷)的其他选项不能用于节点刚体。(https://www.xing528.com)
薄壳到实体边界选项(EDCNSTR,ADD,STS)把实体单元区域和薄壳单元区域固连起来,如图10-5所示,可将一个单独壳节点固连到最多9个实体节点上,这些实体节点定义一个fiber矢量。定义fiber矢量的实体单元节点在整个分析中保持线性但是在fiber方向上保持相对移动。薄壳节点必须和某个沿fiber方向的实体单元节点位置重合。
与用EDWELD命令定义的焊接点相似,RIVET(EDCNSTR,ADD,RIVET)选项在两个不同位置的节点间定义了一个无质量刚性约束。和焊接点不同的是,一个rivet不能定义破坏。当定义了一个rivet时,节点间的距离将在模拟中的任何运动中保持不变。由rivet连接的节点不能是模型中其他约束的一部分。
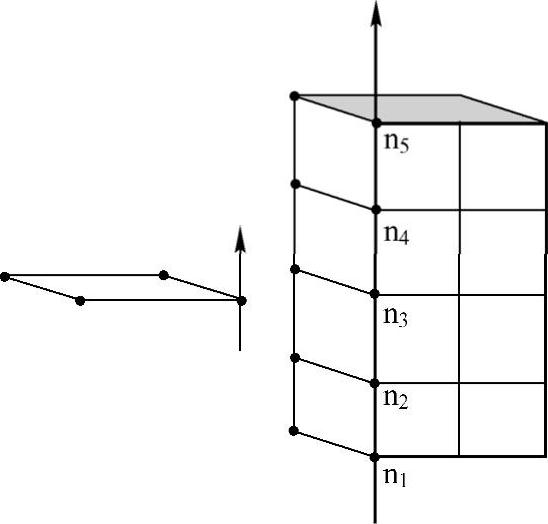
图10-5 约束
在显动态分析中,模拟被焊接在一起的组元是很普遍的。在部件通常通过焊接装配在一起的汽车应用中,显得尤其普遍。这种情况下,在ANSYS/LS-DYNA中使用EDWELD命令来模拟焊接约束。可以模拟两种不同类型的焊接:无质量焊接点和一般焊接。用EDWELD命令连接的节点不能用其他方式约束。
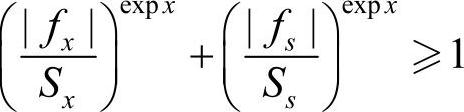
对于一个无质量焊接,必须指定两个不同位置的节点。也可以用EDWELD命令输入失效参数在焊点内定义失效。失效依据下列关系:
在GUI中,用下列菜单路径来定义一个无质量焊点:
Main Menu>Preprocessor>LS-DYNA Options>Spot weld>Massless Spotwld。
一般焊接用于模拟两个部件的长焊接截面。对于一般焊接,必须指定一个有效的节点组元,可以使用重合节点。但是,如果使用了重合节点,就必须定义输出数据所用的局部坐标系。一般焊接内的失效也可以用EDWELD命令的失效参数来定义,使用与上述等式相同的关系式。
在GUI中,采用下列菜单路径来定义一般焊接:
Main Menu>Preprocessor>LS-DYNA Options>Spot weld>GenrlizdSpotwld。
在瞬动态模拟中,经常需要定义初始条件。在ANSYS/LS-DYNA中,可以用EDVEL和EDPVEL命令定义初始速度。可以使用这些命令对各种实体施加线速度和角速度。用EDVEL对节点组元或单个节点施加速度;用EDPVEL给部件或部件集合施加速度。
EDVEL和EDPVEL提供了两种定义角速度的方法,Option=VGEN和Option=VELO.VGEN方法围绕指定轴对一个实体(节点组元、部件等)施加刚体旋转。VELO法直接给每个节点的自由度施加角速度。因为只有壳和梁单元有旋转自由度,VELO法的角度输入只适用于SHELL163和BEAM161单元。对于VGEN和VELO方法,瞬态速度可以相对于整体笛卡儿坐标系来定义。
注意:为了模拟旋转体,不管是否用位移,都应该用Option=VGEN因为此方法施加了刚体旋转。
由于LS-DYNA的结构体系,定义初速度的两种方法Option=VGEN和Option=VELO不能在同一个分析中使用。
定义初速度,可使用下列步骤:
1)定义想要施加初速度的实体。这可以是单个节点,一个节点组元[CM],一个部件[EDPART]或一个部件集合[EDASMP]。
2)确定VGEN和VELO是否适合的应用。
3)在GUI中采用下列菜单路径之一定义初始速度[EDVEL,EDPVEL]:
●Main Menu>Solution>Initial Velocity>-On Nodes-w/Nodal Rotate(VELO选项)。
●Main Menu>Solution>Initial Velocity>-On Nodes-w/Axial Rotate(VGEN选项)。
●Main Menu>Solution>Initial Velocity>-OnParts-w/Nodal Rotate(VELO选项)。
●Main Menu>Solution>Initial Velocity>-OnParts-w/Axial Rotate(VGEN选项)。
对于VGEN和VELO选项,相对于整体坐标系输入平动速度(EDVEL或EDPVEL命令的VX,VY和VZ域)。对于VELO选项,在整体笛卡儿坐标系中输入节点角速度(OMEGAX,OMEGAY和OMEGAZ域);对于VGEN选项,输入角速度的数量级(OMEGAX)、旋转坐标轴(XC,YC,和ZC域)以及相对于整体X,Y,Z轴的方向角。
如果没有用EDVEL或EDPVEL命令指定初始速度,则所有的初始速度为零。同样的,如果仅指定EDVEL(如EDVEL,VGEN,Cname)命令的Cname域或EDPVEL(EDPVEL,VGEN,PID)的PID域,由于这两个命令的其他域默认值为零,所以此时施加的初始速度为零。
若想改变事先用EDVEL命令指定的初始速度,用相同的组元名字或节点号重新定义一个新的速度就可以了。这个新值将覆盖原来的组元或节点值。为了显示或删除事先加在节点或节点组元的初始速度,使用EDVEL,LIST和EDVEL,DELE命令(在GUI中,路径为Main Menu>Solution>Initial Velocity>-On Nodes-List或Main Menu>Solution>Initial Velocity>-On Nodes-Delete)。
类似地,若想改变事先用EDPVEL命令指定的初始速度,可以用相同的部件或部件集合ID来重新定义一个新速度。这个新值将覆盖原来的部件或部件集合的速度。为了显示或删除事先加在部件或部件集合上的初始速度,使用EDPVEL,LIST和EDPVEL,DELE命令(在GUI中,路径为Main Menu>Solution>Initial Velocity>-On Parts-List或Main Menu>Solution>Initial Velocity>-On Parts-Delete)。
CP系列命令(CP,CPDELE,CPINTF,CPLGEN,CPLIST,CPNGEN,CPSGEN)可用来在一个结构的不同自由度(DOFS)间进行定义、修改、删除、列表和产生耦合。同样,CE系列命令(CE,CEDELE,CEINTF,CELIST,CERIG)可在一个结构的不同DOF间定义、修改、删除、列出约束方程。在ANSYS/LS-DYNA的显式动态程序中,CP和CE命令仅用于UX,UY和UZDOFS(不允许旋转DOFS)。
既然旋转DOFS(UX,UY,UZ)不能使用,那么在显式分析中就不能用CP一系列的命令来模拟涉及旋转的刚体行为。如果使用了CP命令,将会导致非物理响应。
要注意到,包含非重合节点,或包含不沿耦合自由度方向节点的耦合设置不会产生力矩约束。这就意味着如果结构旋转,耦合的节点也会旋转。只有作用力和反作用力在模型中满足力矩平衡。对于耦合约束的每个节点,力矩结果与节点到固定中心的距离有关,位移方向与结果力矩有关。在某些情况下这可能导致非物理响应。
当模拟地理力学系统时,常常用一个有限域来表示地面或其他大的实体。对于这种分析,可以在模型外部使用非反射边界限制模型的整体尺寸。可以在以SOLID164单元模拟的有限域的表面上应用这些边界。非反射边界将防止在边界产生的人工应力波反射重新进入模型从而破坏结果。
当模型中包含非反射边界时,LS-DYNA会根据线性材料行为假设计算所有边界部分的阻抗匹配函数。因此,需进行有限元网格划分从而使所有重要的非线性行为都包含在离散模型中。
要定义非反射边界,需选择沿SOLID164实体外表面(NSEL)组成所需边界的节点,然后定义一个节点组元(CM),用EDNB命令在这些节点组元上施加非反射边界,然后激活膨胀和剪切选项。用EDNB,LIST和EDNB,DELE来显示或删除定义的非反射边界。
在显式动态分析中,为了应用与温度有关的材料,或包括热应力的影响,可能需要定义温度载荷。温度载荷主要应用在PLANE162,SHELL163和SOLID164单元中。ANSYS/LS-DYNA程序提供了几种温度载荷:
●应用于节点组元的随时间变化的温度(EDLOAD)。
●应用于模型中所有节点的常温度(TUNIF/BFUNIF)。
●在顺序显式动态分析中,施加非均匀温度载荷(不随时间变化)的ANSYS热分析结果(LDREAD,要求顺序求解)。
第一种方法用EDLOAD,TEMP命令和一般的加载方法对给定的节点组元施加随时间变化的温度。但必须定义两个数组参数表示载荷:第一个包括时间值,第二个包括温度值。可以用这些参数定义曲线或用EDLOAD命令直接输入。也可以用EDLOAD的SCALE参数来对这些温度值进行缩放。
第二种方法允许给模型中所有节点施加均匀不变的温度。这种方法用于模拟稳态热载荷的结构。也可以用TUNIF命令或BFUNIF,TEMP命令施加这种温度载荷。
第三种方法允许把ANSYS热分析中计算的温度作为载荷施加到显式动态分析中。这种方法对模拟与温度有关的现象是很有用的,比如锻造。应用这种方法,必须执行隐显顺序求解。在显式阶段,可以用LDREAD命令从热分析(隐)结果文件(Jobname.RTH)中读入温度数据,然后加到模型的节点上。在热分析中只能从指定的时间点转移这些温度。
对于这3种温度加载方法,可以用TREF命令输入参考温度。热载荷定义为施加温度和参考温度的差值。如果不定义参考温度,其默认值为零。
为了使温度载荷有效,必须使用温度相关双线性各向同性材料模型。忽略屈服强度和切向模量,可以用这个模型代表热弹性材料。
值得注意的是,温度加载的EDLOAD方法不能和LDREAD或TUNIF/BFUNIF方法混合使用。另外,EDLOAD命令不能显示或删除LDREAD,TUNIF或BFUNIF施加的温度载荷。
在一个显动态分析中可以同时使用LDREAD和TUNIF(BFUNIF)。LDREAD命令把温度载荷施加到所选的节点上,覆盖了TUNIF或BFUNIF定义的任何温度载荷。LDREAD没有选择的节点将采用TUNIF或BFUNIF命令定义的温度载荷。采用BFDELE命令,删除LDREAD定义的温度载荷,用BFLIST命令显示其定义的载荷。
为进行隐式-显式连续求解,已将动力松驰功能加入到ANSYS/LS-DYNA程序(EDDRELAX命令)。真实的动力松弛(EDDRELAX,DYNA)是通过增加阻尼,使动能降为零,从而允许显式求解器进行静态分析。当隐式求解器用于提供预载荷时(EDDRELAX,ANSYS),可采用稍不同的方法,基于预加载的几何构型(也就是,由隐式求解得到的节点位移)进行应力初始化。在后一种情况中,显式求解器仅用101个时间步来施加预载荷。而在前一种情况,求解器每250个循环步(默认值)就检查动能直到预载荷动能耗散完毕。ANSYS/LS-DYNA支持两种方法,它在零时间瞬态分析部分开始前,在虚拟时间内进行。EDLOAD命令通过PHASE标记指定分析类型。
EDLOAD,ADD,Lab,Cname,Par1,Par2,PHASE
PHASE:
0载荷曲线仅用于瞬态分析(默认值),或隐式-显式连续求解。
1载荷曲线仅用于动力松弛。
2载荷曲线仅用于瞬态分析和动力松弛。
与ANSYS/LS-DYNA的动力松弛有关的主要有5种不同的分析类型,现讨论如下:
●仅瞬态动力分析(EDDRELAX,OFF):在这种情况下,EDLOAD命令的PHASE参数置为零。不采用动力松弛,这是默认设置。
●仅应力初始化而没有瞬态分析(EDDRELAX,DYNA):这种情况用ANSYS/LS-DYNA显式求解器近似求解静力分析,实际最好由隐式求解器,如ANSYS来处理。在EDLOAD命令中PHASE参数置为1,终止时间(TIME命令)必须置0,以预防静载荷的卸载。采用实际的动力松弛。
●无载荷瞬态分析的应力初始化(EDDRELAX,DYNA):这种情况与前一种情况相同,不同的是时间设置为所期望的值。在零时间时,结构立即卸载,自由振动。
●有加载瞬态分析的应力初始化(EDDRELAX,DYNA):它类似于前一种情况,不同的是用EDLOAD命令(借助于PHASE=2)在虚拟时间进行动力松弛以获得预加载并在真实时间进行瞬态分析。如果用倾斜载荷曲线代替恒定载荷曲线,则结构在零时刻时卸载并重新加载。因此,如果显式求解器需要一个倾斜载荷曲线对静态求解精确收敛,那么较好的是使用两个EDLOAD命令。第一个(PHASE=1)用斜坡载荷曲线施加预载荷。而第二个(PHASE=0)不用斜坡载荷曲线继续加载。
注意,如果对同一个组元(或PARTID)和同一个载荷标签多次执行EDLOAD命令,那么会用最后一个EDLOAD命令的值。对于给定的组元(PARTID)和载荷标签不能使用多个PHASE参数值。为符合这一设置,必须为应力初始化和瞬态曲线复制节点组元(这一工作区仅适用于用组元定义载荷)。
●隐式-显式连续求解(EDDRELAX,ANSYS):这种情况是用ANSYS隐式求解器施加预载荷以求得位移结果,作为预载荷施加ANSYS/LS-DYNA显示器解器的给定几何构型上,通过应力初始化得到预加载的几何实体。在EDLOAD命令中的PHASE必须置为0。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。