



首先以求解连续梁为例,引出结构有限元分析的一些基本概念和计算步骤。
在图1-1中,某连续梁承受集中力矩作用。将结构离散为3个节点、两个单元。结构中的节点编号为1、2、3;单元编号为①、②。
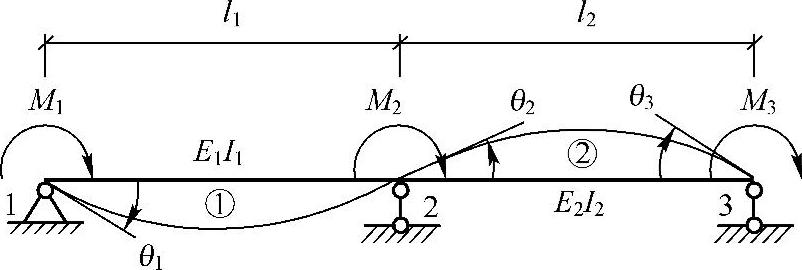
图1-1 受集中力矩作用的连续梁
1.单元分析
在有限元分析过程中,第一步是进行结构离散,并对离散单元进行分析,分析的目的是得到单元节点的力与位移的关系。单元分析的方法有直接法和能量法,本节采用直接法。
从连续梁中取出一个典型单元e,左边为节点i,右边为节点j。将节点选择在支撑点处,单元两端只产生转角位移θei、θej,顺时针转动为正。独立的单元杆端内力为弯矩mi、m,顺时针为正。j
记: 为单元e的节点位移向量;
为单元e的节点位移向量; 为单元e的杆端力向量。
为单元e的杆端力向量。
根据结构力学位移法可得如下平衡方程:

式(1-1)中: ,
, ,EI、l分别为单元e的抗弯刚度和长度。
,EI、l分别为单元e的抗弯刚度和长度。
keij(i,j=1,2)的物理意义为单元j处发生单位转角引起的i处的力矩,将式(1-1)写成矩阵形式

或(f)e=(k)e(u)e (1-3)
式(1-2)和式(1-3)称为梁单元e的刚度方程。式中,(k)e称为梁单元e的刚度矩阵,只要已知梁单元的EI、l就可计算出单元刚度矩阵。
以上分析实现了单元分析的目的,即得到单元刚度方程和单元刚度矩阵。
2.整体分析
有限元分析的第二步要将离散的单元集成整体,组集过程可见图1-2。在组集过程中,必须满足以下条件:
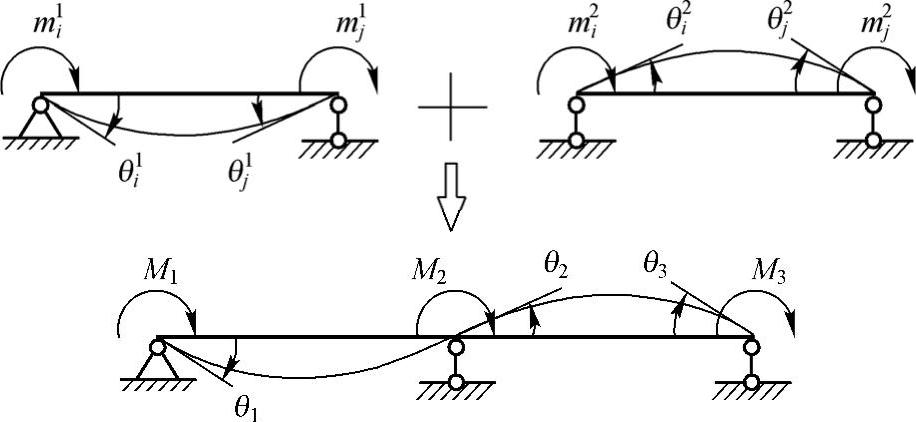
图1-2 离散的单元集成整体
1)变形协调

2)节点平衡

式(1-2)代入(1-5)可得:

式(1-4)代入(1-6)整理可得:

写成矩阵形式,得

式(1-8)称为结构刚度方程,它实际上是结构的节点平衡方程,记为
(K)(Δ)=(P) (1-9)
式(1-9)中: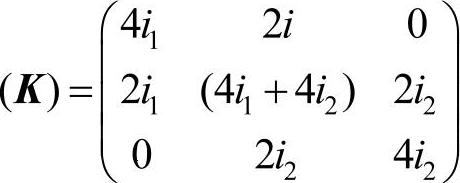 称为该结构的原始刚度矩阵;{Δ}={θ1θ2θ3}T称为该结构的位移向量;(P)=(M1M2M3)T称为该结构的节点载荷向量。
称为该结构的原始刚度矩阵;{Δ}={θ1θ2θ3}T称为该结构的位移向量;(P)=(M1M2M3)T称为该结构的节点载荷向量。
以上分析实现了整体分析,即得到结构原始刚度矩阵和结构刚度方程。
3.用直接刚度法形成结构刚度矩阵
通过整体分析,建立了节点的平衡方程,即结构的刚度方程,从而得到结构刚度矩阵。但是,要实现电算,不可能对每一具体结构都进行一次总体分析,而应该找一种规律,在确定了节点位移和载荷的排序后,使计算机能够直接由单元刚度矩阵集成结构刚度矩阵,从单元刚度方程得到结构的刚度方程,这一方法称为直接刚度法。下面介绍用直接刚度法直接由单元刚度矩阵集成结构刚度矩阵的过程。
(1)确定结构刚度矩阵的阶数
结构刚度方程中第i行,表示该结构第i个位移分量上力的平衡方程,因此,如果结构有N个独立位移分量,就可列出N个独立平衡方程,结构刚度矩阵就是N×N阶的。本例有3个独立的位移分量,故总刚度必然为3×3阶的,写成:

(2)确定单元刚度矩阵中元素与结构刚度矩阵中元素的关系若将单元刚度矩阵下标写成位移分量编号的形式,
单元1:i=1,j=2

单元2:i=2,j=3

则有:k11=k111,k12=k112,k13=0,k21=k121,k22=k122+k222,k23=k232,k31=0,k32=k322,k33=k233。
可见,若将单元刚度矩阵中元素下标写成位移分量编号的形式,则结构刚度矩阵中任一刚度元素与单元刚度矩阵中元素有如下关系:

式(1-13)中:e—单元号,ne—结构单元总数
因此,用直接刚度法集成总刚度,可归纳为以下几步:
1)结构未知量进行编号,确定各未知量在结构刚度方程中的位置(行号);
2)确定结构刚度矩阵的阶数N;
3)对单元e进行循环,寻找e单元刚度矩阵中各元素下标对应于整体刚度方程中的未知量编号;并按此编号,根据式(1-13)分别叠加到结构总体刚度矩阵中的对应位置上去。
对单元循环完毕时,结构刚度矩阵就形成了。形成结构刚度矩阵是有限元分析过程中十分重要的环节,为了节约计算机存储空间,加快刚度方程求解速度,还必须了解结构刚度矩阵具有的如下性质:
1)结构刚度矩阵是N×N阶的方阵,N为结构的未知量总数。
2)结构刚度矩阵是对称阵,即kij=kji,这一性质由力-位移互等定理决定。
3)处于同一单元上的两个未知量称相关未知量。若两个未知量不相关,则kij=0。由式(1-13)可知,两个未知量不相关,就没有单元刚度矩阵贡献,因此kij=0,如本例中k13=k31=0。
4)结构刚度矩阵为带状矩阵,其非0元素分布在主对角线元素附近。
5)结构刚度矩阵是稀疏阵,非0元素很少。对于较大规模的结构,结构刚度矩阵中的非0元素只占总元素的10%左右。
6)结构刚度矩阵是非负定矩阵,即对任意不为0的N维向量(x)有:(x)T(K)(x).0。
4.支承条件的引入
在有限元分析过程中,通常在结构原始刚度矩阵(K)建立以后,才引入支承条件。下面仍对本例进行讨论。如果改变本例中节点3的边界条件,如图1-3所示,在节点1和节点2处转角θ1、θ2是未知量,节点力M1、M2是已知量,节点3是固端,M3为未知量,转角θ3是已知量,即θ3=0。
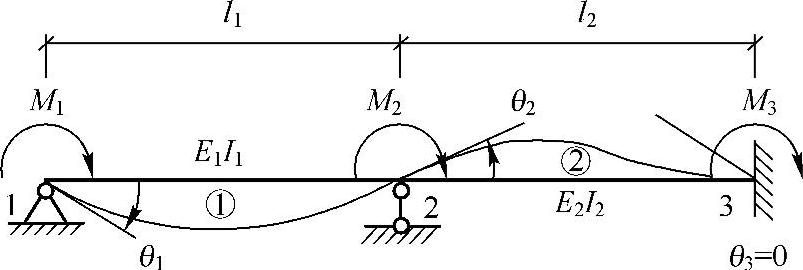
图1-3 改变节点边界条件的连续梁
计算分两步进行。(https://www.xing528.com)
第一步,暂不引入支承条件和载荷情况,先建立原始刚度方程,即式(1-8);
第二步,在固定端引入支承条件θ3=0,即将式(1-8)修改为:

为了求解θ1、θ2,可从矩阵方程中取出前面两个方程:

即

式(1-16)就是引入支承条件和载荷情况后得到的位移法基本方程,由此可解出基本未知量θ1、θ2。
将式(1-16)与(1-8)比较,可以看出,如果在式(1-8)中把(K)的第3行和第3列去掉,同时把右边向量中的相应元素去掉,就可直接得出式(1-16)。因此,引入支承条件的问题就归结为去掉对应未知量的行与列的问题,这种方法称为划行划列法。
有时,为了能方便地计算出支反力,可以将式(1-8)写成

式(1-17)中: ——未知位移量;
——未知位移量;
(Δ)β=(θ3)——已知位移; ——已知载荷向量;
——已知载荷向量;
(P)β=(M3)——未知载荷向量或支反力。
式(1-17)可写成如下两个独立方程组:
(k)αα(Δ)α+(k)αβ(Δ)β=(P)α (1-18)
(k)βα(Δ)α+(k)ββ(Δ)β=(P)β (1-19)
由于(Δ)β=(θ3)=0,因此式(1-18)等价于式(1-16)。
当(Δ)α求得后,代入式(1-19),则可求得支反力:
(P)β=(k)βα(Δ)α+0 (1-20)
对于本例,即

由此可见,要计算支反力,必须先将已知位移对应的刚度矩阵元素(k)βα提取出来,然后再划行划列。
在程序计算中,希望将引入支座后的矩阵仍保留原来的阶数且未知量排列顺序不变,为此,可将式(1-16)扩大成如下形式:

即对原始刚度矩阵先提取对应于已知位移向量的刚度元素,以备计算支反力用,再将原始刚度矩阵中这些元素全部置0,对角线元素置1。载荷向量中对应的元素也置0。这种处理约束的方法称为“充0置1法”。
5.非节点载荷的处理
如果在单元内有非节点载荷,就不可能直接建立结构刚度方程,因为结构刚度方程表示的是节点力的平衡方程。图1-4a所示结构具有3个节点、2个单元,M1、M2、M3为节点载荷,M′、M′′为非节点载荷。
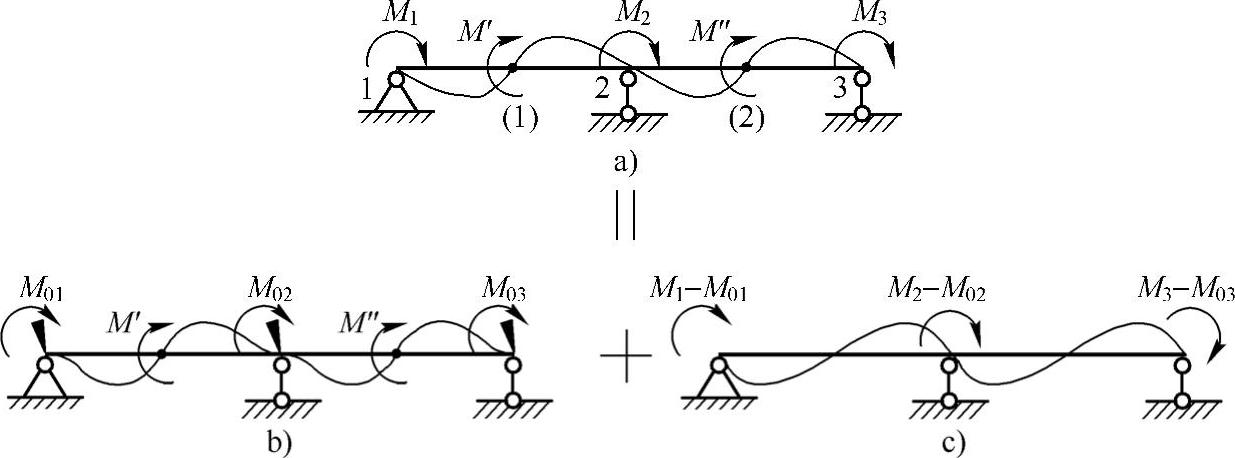
图1-4 单元内有非节点载荷作用的连续梁
要解决这个问题,需用等效节点载荷代替非节点载荷来分析整体结构受力,处理原则为在等效节点载荷作用下的结构节点位移与实际载荷作用下结构的节点位移应相等。具体可按如下步骤处理。
(1)求等效节点载荷
计算非节点载荷的等效节点载荷时可分以下两步进行。
第一步:在各节点加上约束,阻止节点发生位移,计算结构上所有非节点载荷的效应,如图1-4b所示,其中M01、M02、M03为非结点载荷在增加的约束中引起的反力(弯矩)。
单元(1)、单元(2)产生的固端力矩(加脚标0表示固端力矩)为:

各节点增加的约束中的反力分别为与该节点相关联单元的固端力矩之和:

第二步:去掉各节点的约束,相当于在各节点施加外力矩向量{P}=-(M0);再叠加上原有的节点载荷M1、M2、M3,总的节点载荷如图1-4c所示。
显然,把图1-4b和图1-4c两种情况叠加就得到图1-4a给出的情况。图1-4c中的节点载荷{P}称为结构非节点载荷的等效节点载荷,而式(1-24)中的单元固端力矩(M0)(1)、(M0)(2)的反向力称为相应单元载荷的等效节点载荷。
(2)求各杆端弯矩
连续梁在非节点载荷作用下的杆端弯矩由两部分组成,一部分是在节点加阻止位移的约束时非节点载荷作用下的杆端弯矩,另一部分是在等效节点力载荷作用下的杆端弯矩。第二部分的计算方法在前面已详细讨论,即先由式(1-8)求出结构的位移向量{Δ},然后代入式(1-2)计算杆端力。
将两部分杆端力进行叠加,即得非节点载荷作用下各杆的杆端弯矩。

6.有限元分析的基本步骤
有限元分析的实施过程可分为3个阶段。
前处理阶段:将整体结构或其一部分简化为理想的数学力学模型,用离散化的单元代替连续实体结构或求解区域。
分析计算阶段:运用有限元法对结构离散模型进行分析计算。
后处理阶段:对计算结果进行分析、整理和归纳。
以上讨论尽管只是针对两跨连续梁进行的,但其分析阶段的思想及计算步骤却代表了所有复杂结构的有限元静力分析过程。因此,读者必须熟练掌握这一过程的每一环节,领会其分析思路。为了便于理解,将有限元分析的基本步骤归纳成以下几点:
1)结构简化与离散化,并对离散结构进行单元、节点编号;
2)整理原始数据,包括单元、节点、材料、几何特性、载荷信息等;
3)形成各单元的单元刚度矩阵;
4)形成结构原始刚度矩阵;
5)形成结构载荷向量,它是节点力与非节点力的总效应;
6)引入支承条件;
7)解方程计算节点位移;
8)求各单元内力和各支承反力。
不同结构的有限元分析具有以下区别:
1)描述结构的单元形式不同——一种单元将对应一种刚度;
2)单元的节点未知量个数不同——平面刚架单元为3、空间刚架单元为6等。
针对具体结构形式,可以进行具体的有限元分析。桥梁结构一般为空间复合结构,它的离散模型可由梁、板、壳以及三维实体单元组合而成,复杂结构的单元分析一般采用能量法推导。但为了简化计算,一般可近似为杆系结构,因此,下一节将用能量法描述有限元分析原理和单元分析方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。