



传统的装配元件方法是给元件加入各种固定约束,将元件的自由度减少到0,因此元件的位置被完全固定,这样装配的元件不能用于运动分析(基体除外)。另一种装配元件的方法是给元件加入各种组合约束,如“销钉”“圆柱”“刚体”和“球”等,使用这些组合约束装配的元件,因自由度没有完全消除(刚体、焊接和常规除外),元件可以自由移动或旋转,这样装配的元件可用于运动分析。这种装配方式称为连接装配。
在“元件放置”操控板中,展开“用户定义”下拉列表框,列出系统定义的连接装配约束形式,如图7-24所示。
对选定的连接类型进行约束设定时的操作与上一节的约束装配操作相同,因此以下内容着重介绍各种连接的含义,以便在进行机构模型的装配时选择正确的连接类型。
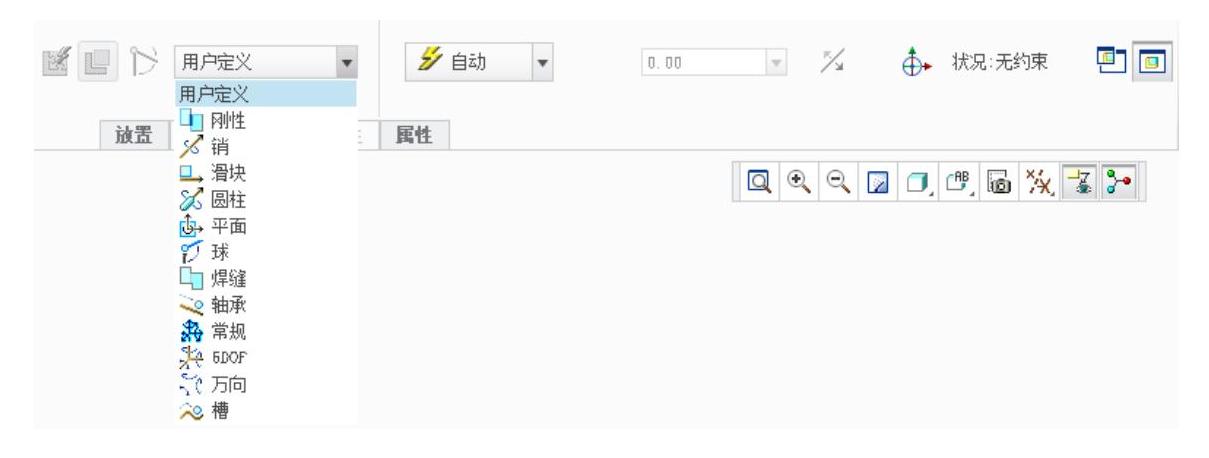
图7-24 连接装配的约束类型
1.刚性连接
刚性连接用于连接两个元件,使其无法相对移动,连接的两个元件之间的自由度为零。连接后,元件与组件成为一个主体,相互之间不再有自由度。如果刚性连接没有将自由度完全消除,则元件将在当前位置被“粘”在组件上。如果将一个子组件与组件使用刚性连接,子组件内各零件也将一起被“粘”住,其原有自由度不起作用,总自由度为0,如图7-25所示。
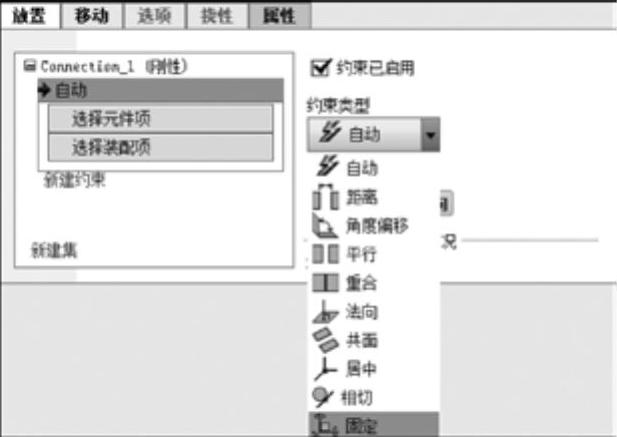
图7-25 “刚性”连接类型
2.销连接
销连接由一个轴对齐约束和一个与轴垂直的平移约束组成。元件可以绕轴旋转,具有1个旋转自由度,总自由度为1。轴对齐约束可选择直边、轴线或圆柱面,可反向;平移约束可以是两个点对齐,也可以是两个平面的对齐/配对,当为平面对齐/配对时,可以设置偏移量,如图7-26所示。
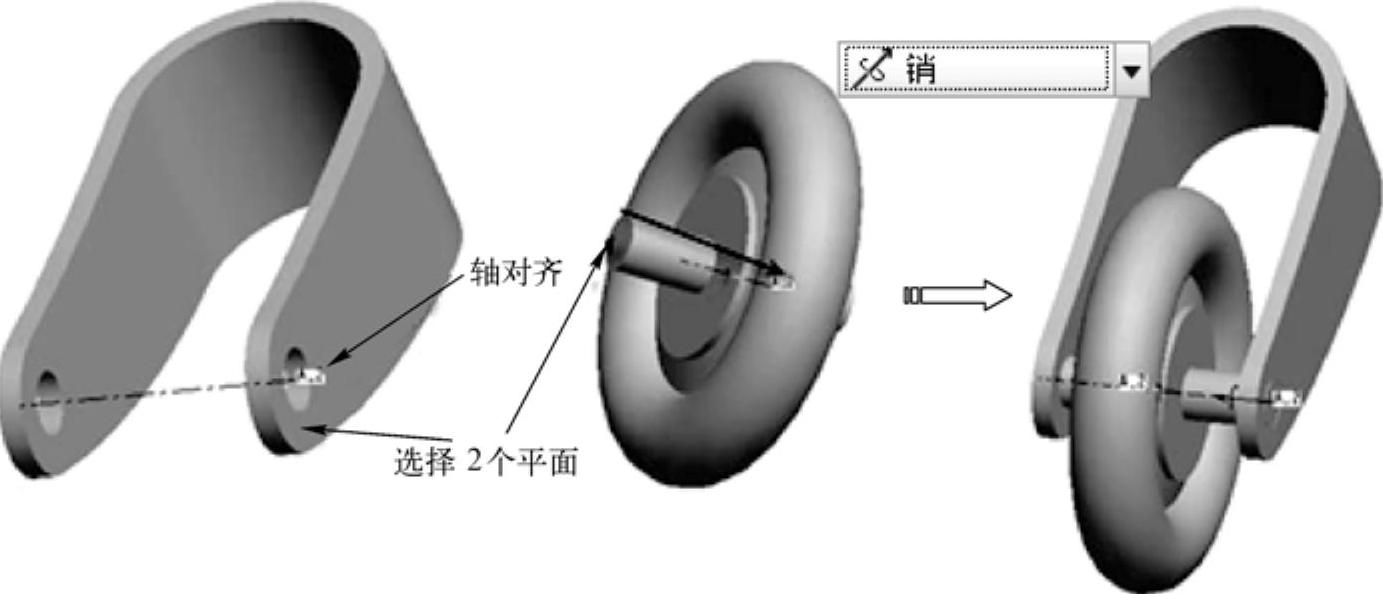
图7-26 “销”连接
3.滑块连接
滑块连接即滑动杆连接形式,由一个轴对齐约束和一个旋转约束(实际上就是一个与轴平行的平移约束)组成。元件可滑轴平移,具有1个平移自由度,总自由度为1。轴对齐约束可选择直边、轴线或圆柱面,可反向。旋转约束选择两个平面,偏移量根据元件所处位置自动计算,可反向,如图7-27所示。
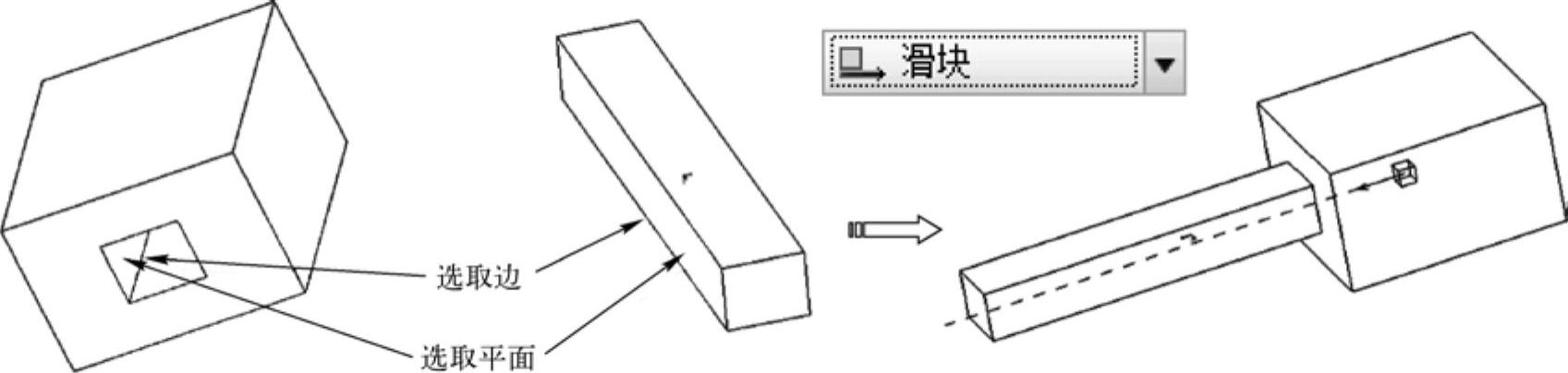
图7-27 “滑块”连接
4.圆柱连接
圆柱连接由一个轴对齐约束组成。由于比销钉约束少了一个平移约束,因此元件可绕轴旋转,同时可沿轴向平移,具有1个旋转自由度和1个平移自由度,总自由度为2。轴对齐约束可选择直边、轴线或圆柱面,可反向,如图7-28所示。
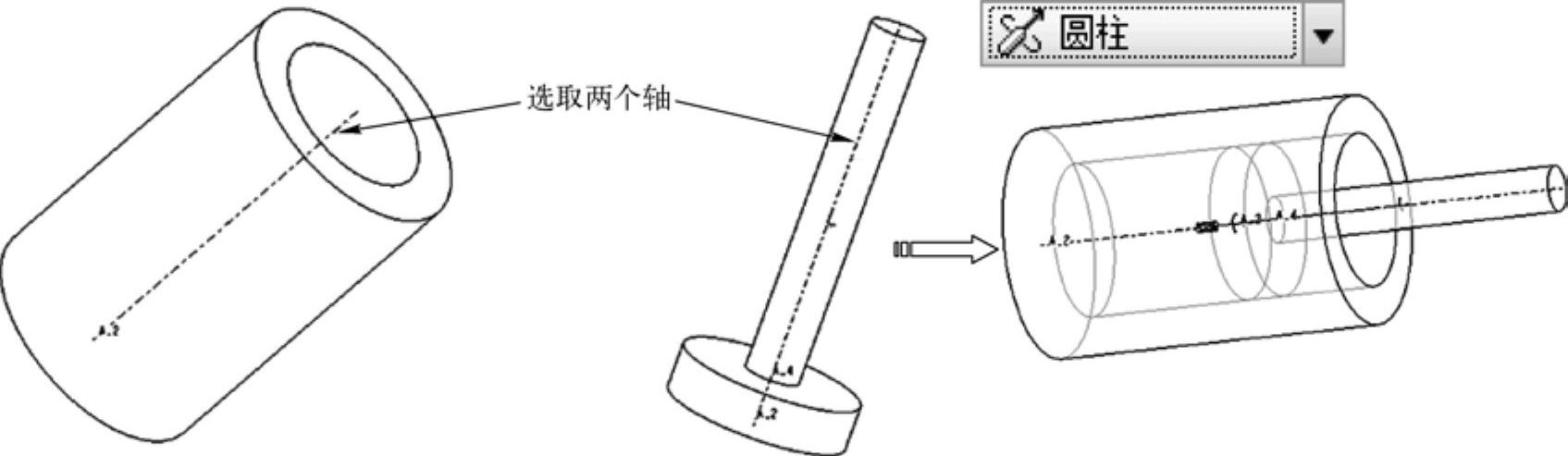
图7-28 “圆柱”连接
5.平面连接(https://www.xing528.com)
平面连接由一个平面约束组成,也就是确定了元件上某平面与组件上某平面之间的距离(或重合)。元件可绕垂直于平面的轴旋转并在平行于平面的两个方向上平移,具有1个旋转自由度和2个平移自由度,总自由度为3。可指定偏移量,可反向,如图7-29所示。

图7-29 “平面”连接
6.球连接
球连接由一个点对齐约束组成。元件上的一个点对齐到组件上的一个点,比轴承连接少了一个平移自由度,可以绕着对齐点任意旋转,具有3个旋转自由度,总自由度为3,如图7-30所示。
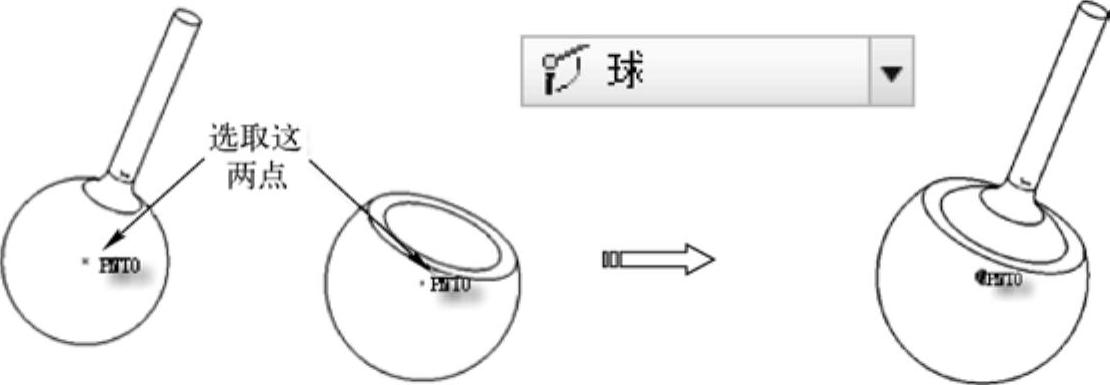
图7-30 “球”连接
7.焊缝连接
焊缝连接使两个坐标系对齐,元件自由度被完全消除,总自由度为0。连接后,元件与组件成为一个主体,相互之间不再有自由度。如果将一个子组件与组件使用焊缝连接,子组件内的各零件将参照组件坐标系按其原有自由度起作用,如图7-31所示。

图7-31“焊缝”连接
8.轴承连接
轴承连接由一个点对齐约束组成。它与机械上的“轴承”不同,是元件(或组件)上的一个点对齐到组件(或元件)上的一条直边或轴线上,因此元件可沿轴线平移并任意方向旋转,具有1个平移自由度和3个旋转自由度,总自由度为4,如图7-32所示。
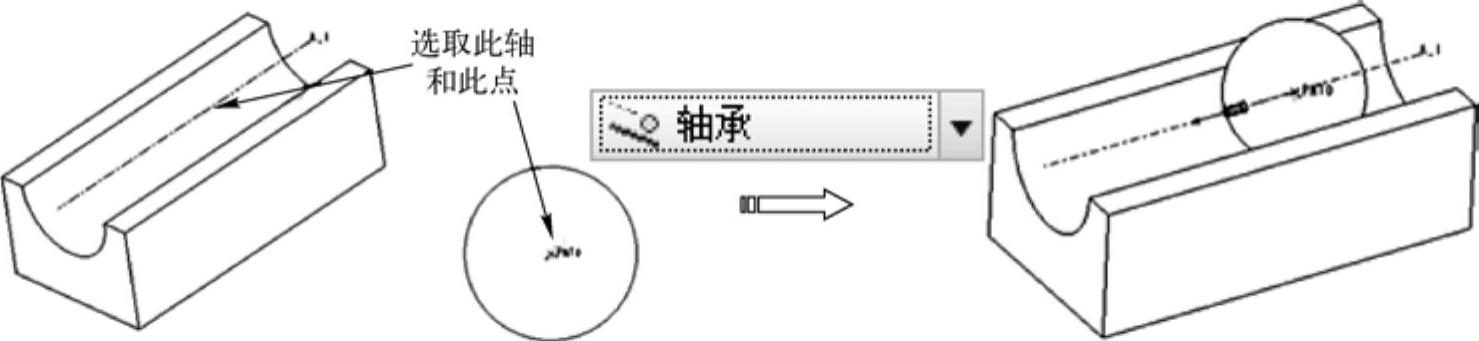
图7-32 “轴承”连接
9.常规连接
常规连接选取自动类型约束的任意参照来建立连接,有一个或两个可配置约束,这些约束和用户定义集中的约束相同。“相切”“曲线上的点”和“非平面曲面上的点”不能用于此连接。
10.6DOF连接
6DOF连接需满足“坐标系对齐”约束关系,不影响元件与组件相关的运动,因为未应用任何约束。元件的坐标系与组件中的坐标系对齐。X、Y和Z组件轴是允许旋转和平移的运动轴。
11.槽连接
槽连接包含一个“点对齐”约束,允许沿一条非直的轨迹旋转。此连接有4个自由度,其中点在3个方向上遵循轨迹运动。对于第1个参照,在元件或组件上选择一点。所参照的点遵循非直参照轨迹。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。