



步进电动机是一种能够将电脉冲信号转换成角位移或线位移的机电设备,它实际上是一种单相或多相同步电动机。单相步进电动机由单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。多相步进电动机由多相方波脉冲驱动,在经功率放大后分别送入步进电动机各相绕组。当向脉冲分配器输入一个脉冲时,电动机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。正常情况下,步进电动机转过的总角度和输入法的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。由于步进电动机能直接接收数字量的输入,所以特别适合于微处理器的控制。在本例中使用的步进电动机型号为35BY48S03,外形如图11-11所示。
1.步进电动机的工作原理
步进电动机有三线式、五线式、六线式三种,其控制方式均相同,必须以脉冲电流来驱动。若每旋转一圈以200个励磁信号来计算,则每个励磁信号前进1.8°,其旋转角度与脉冲数成正比,正、反转可由脉冲顺序来控制。图11-12所示是35BY48S03型步进电动机接线图,A、B、A、B为电动机的励磁信号,即可控制步进电动机的转动。每输出一个脉冲信号,步进电动机走一步。因此依序不断送出脉冲信号,即可使步进电动机连续转动。

图11-11 35BY48S03型步进电动机外形图
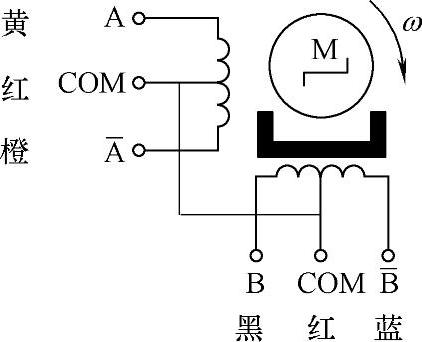
图11-12 35BY48S03型步进电动机接线图
(1)1相励磁法 在每一瞬间只有一个线圈导通。消耗电力小,精确度良好,但转矩小,振动较大,每送一励磁信号可走1.8°。若欲以1相励磁法控制步进电动机正转,其励磁顺序见表11-2。若励磁信号反向传送,则步进电动机反转。
表11-2 励磁顺序A→B→C→D→A

(2)2相励磁法 在每一瞬间会有两个线圈同时导通。因其转矩大,振动小,故为目前使用最多的励磁方式,每送一励磁信号可走1.8°。若以2相励磁法控制步进电动机正转,其励磁顺序见表11-3。若励磁信号反向传送,则步进电动机反转。
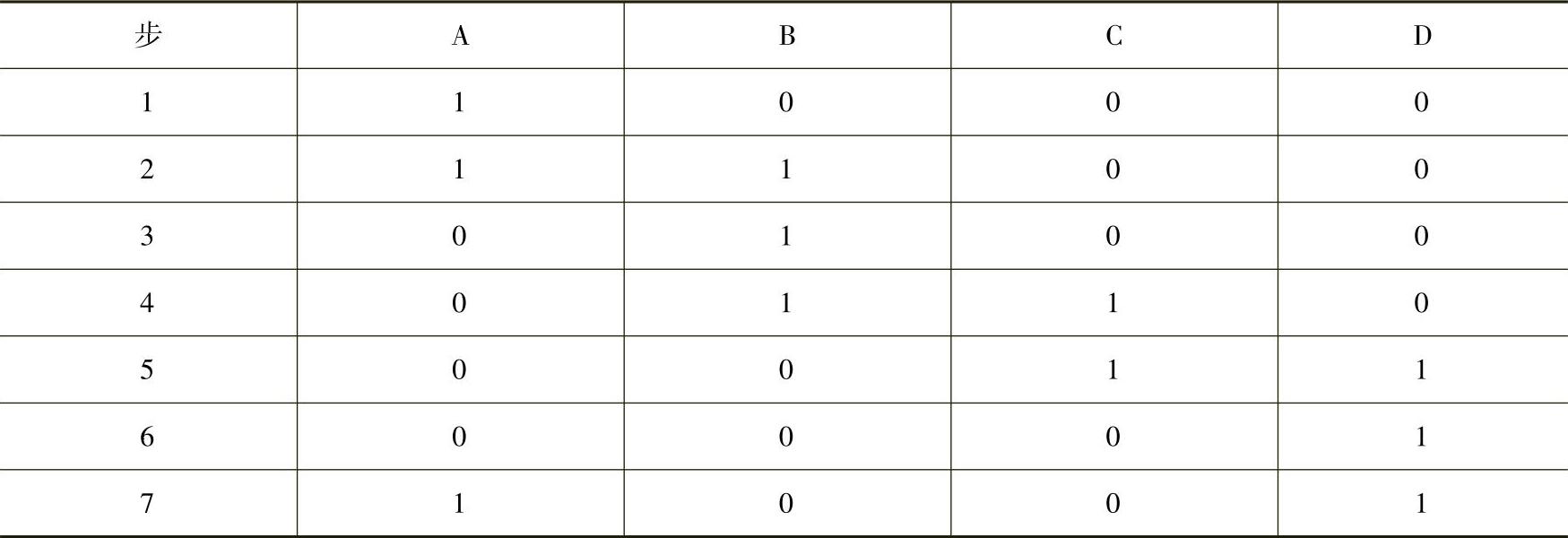
(3)1-2相励磁法 为1相与2相轮流交替导通。因分辨率提高,且运转平滑,每送一励磁信号可走0.9°,故也被广泛采用。若以1-2相励磁法控制步进电动机正转,其励磁顺序见表11-4所示。若励磁信号反向传送,则步进电动机反转。
表11-3 励磁顺序:AB→BC→CD→DA→AB

表11-4 励磁顺序:A→AB→B→BC→C→CD→D→DA→A
步进电动机的负载转矩与速度成反比,速度越快负载转矩越小,当速度快至其极限时,步进电动机即不再运转。所以在每走一步后,程序必须延时一段时间。
35BY48S03型步进电动机主要参数见表11-5。
表11-5 35BY48S03型步进电动机主要参数

2.应用实例1
(1)应用电路 电动机工作电压为12V,最大电流为0.26A,因此用一块达林顿驱动器(ULN2803)来作为驱动,通过P1.0~P1.3来控制各线圈的接通与切断。开机时,P1.0~P1.3均为高电平,依次将P1.4~P1.7切换为低电平即可驱动步进电动机运行,注意在切换之前将前一个输出引脚变为高电平。如果要改变电动机的转动速度,只要改变两次接通之间的时间,而要改变电动机的转动方向,只要改变各线圈接通的顺序即可。图11-13所示为仿真接线简图,而实际中往往采用如图11-14所示的应用电路,电路中采用光耦进行了隔离,既避免了电动机运转时的干扰,又实现了低压控制高压的目的。图中的两个按键用来控制电动机的正反转。
(2)程序设计
1)程序功能:P1.0和P1.1用来控制电动机正反转,在程序中分别对应K0和K1两个变量,下面控制电动机采用的是单相驱动法。
2)程序流程图:电动机正反转程序流程如图11-15所示。(https://www.xing528.com)
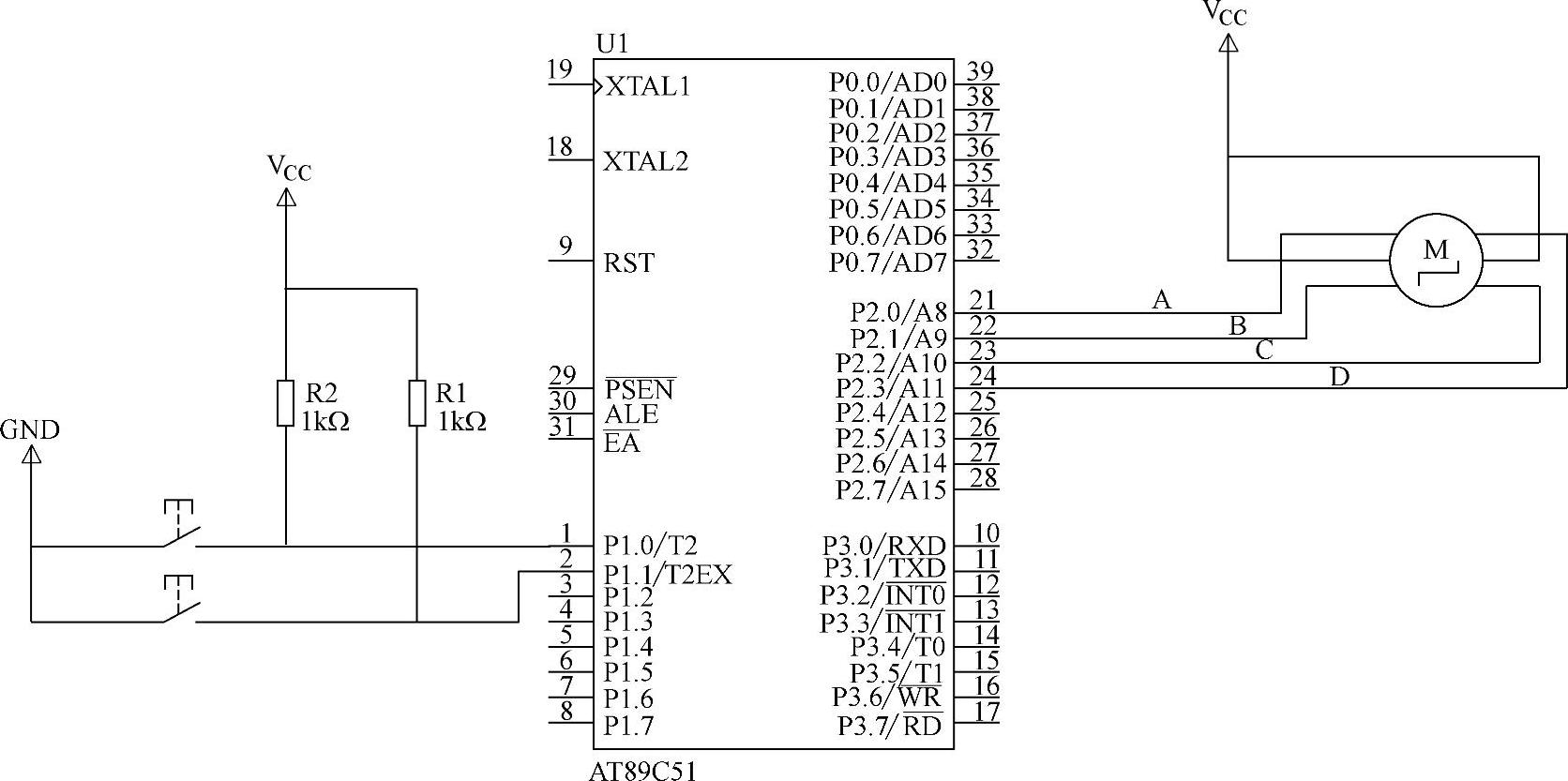
图11-13 仿真接线简图
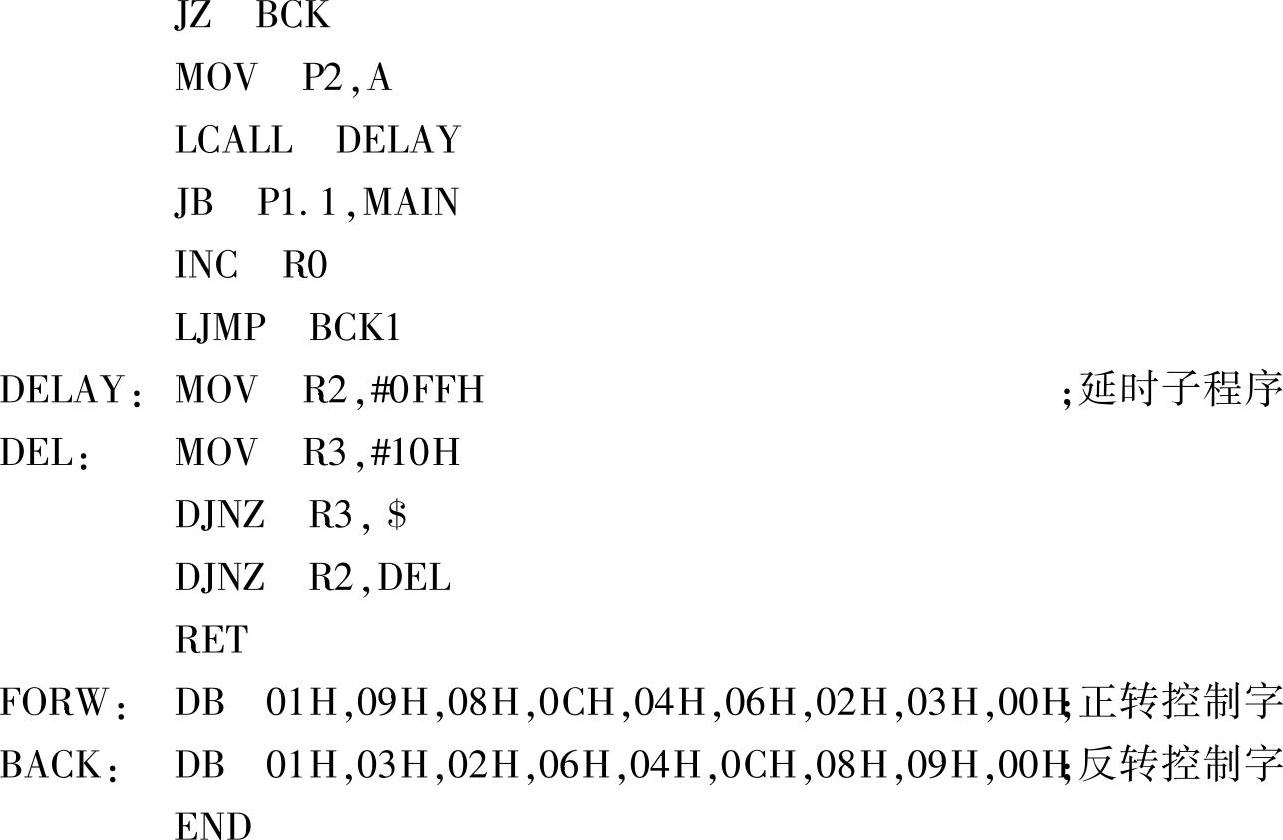
3)参考程序:
①汇编参考程序:
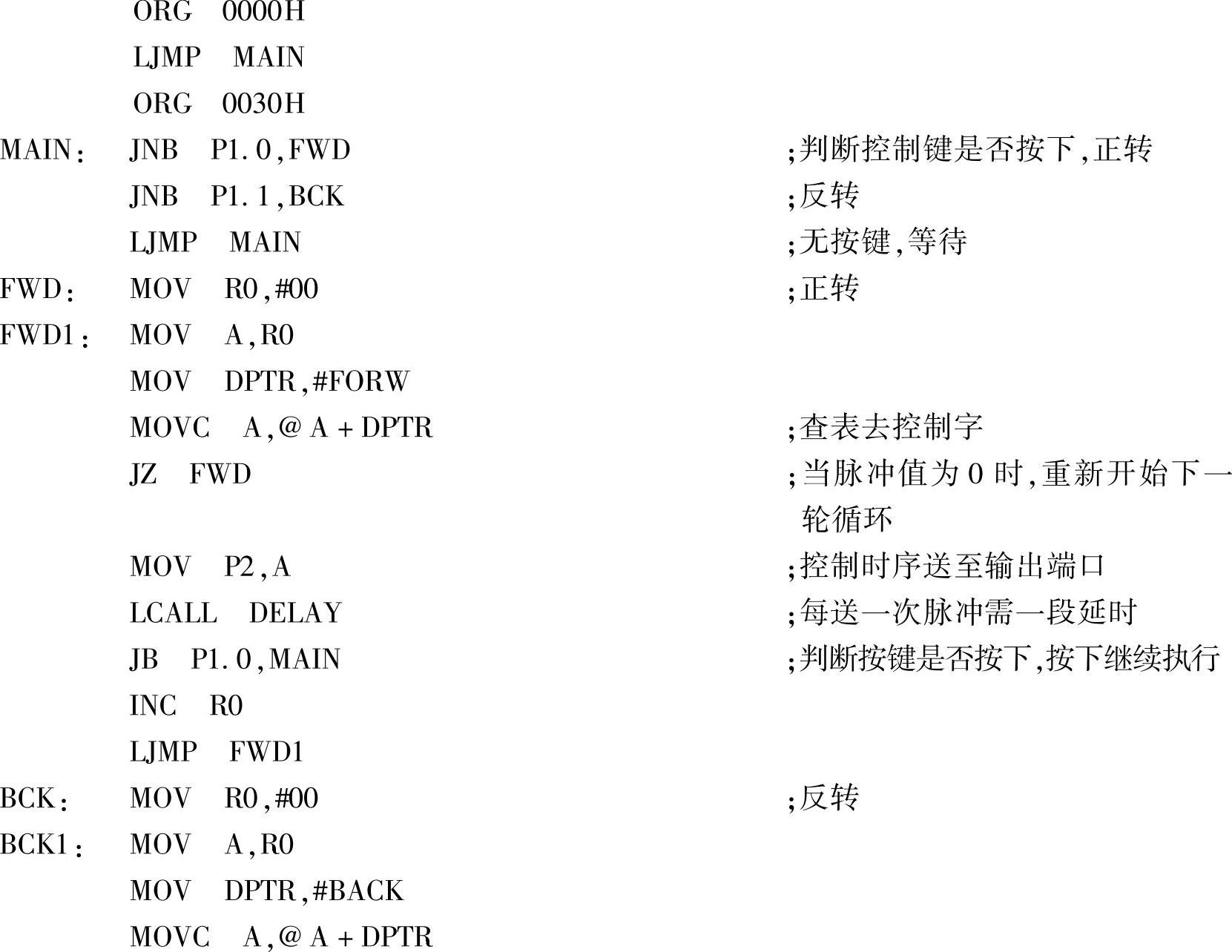
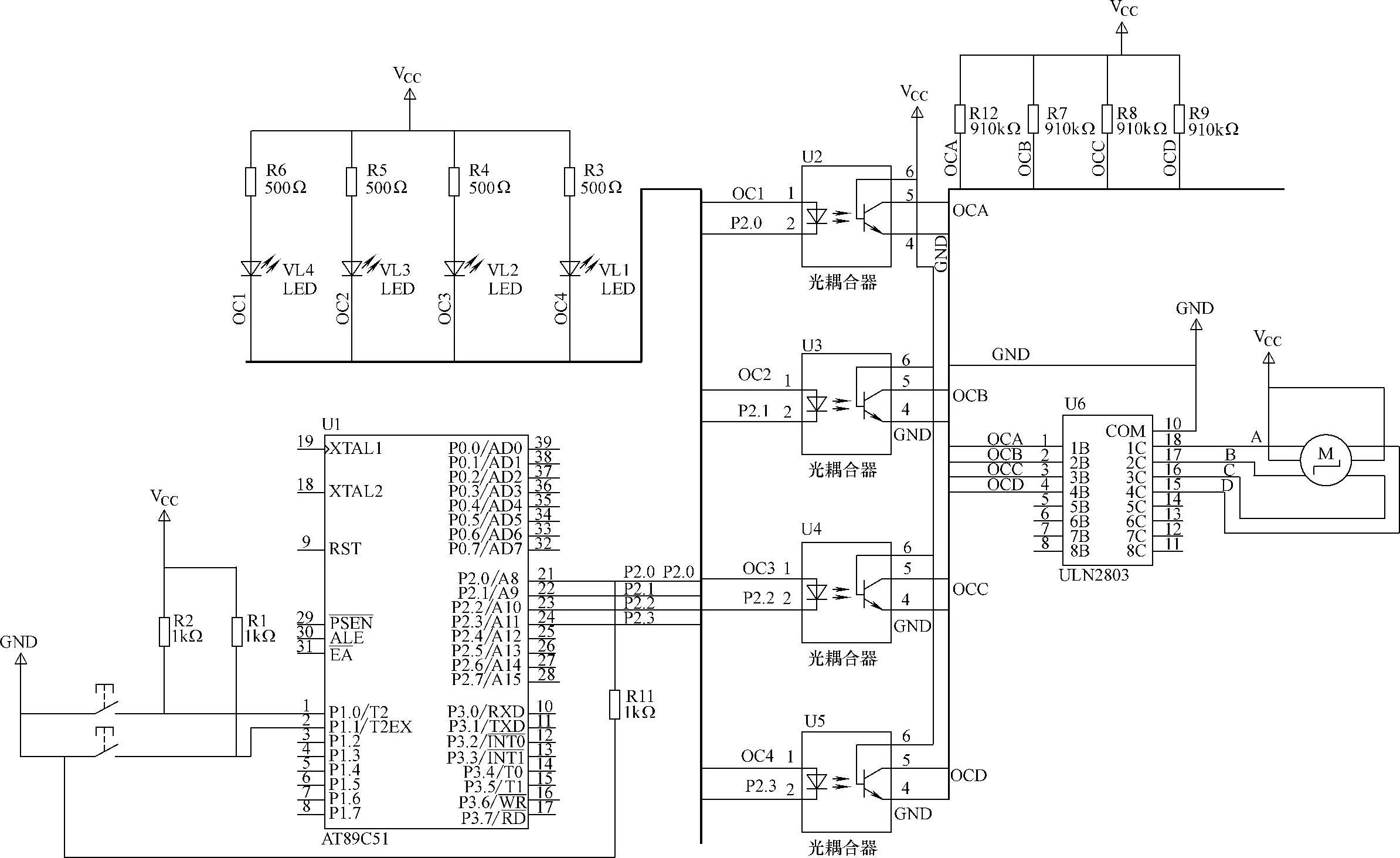
图11-14 应用电路
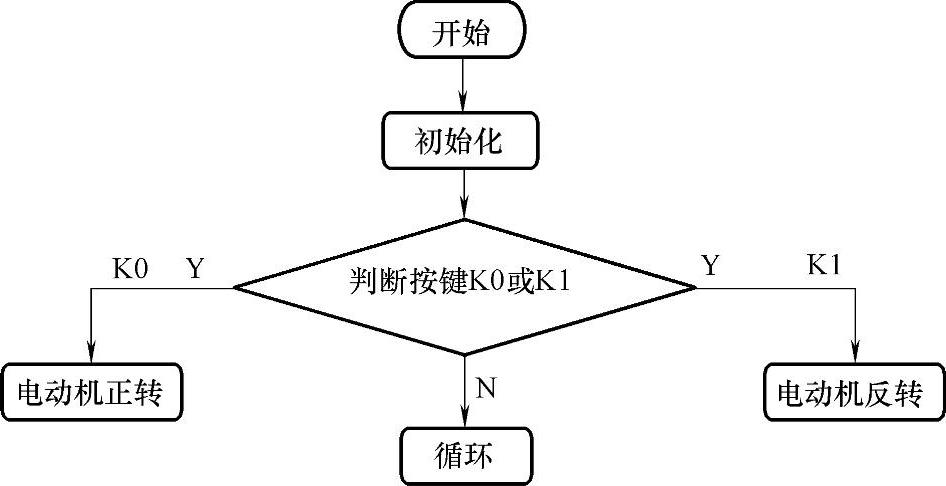
图11-15 电动机正反转程序流程图
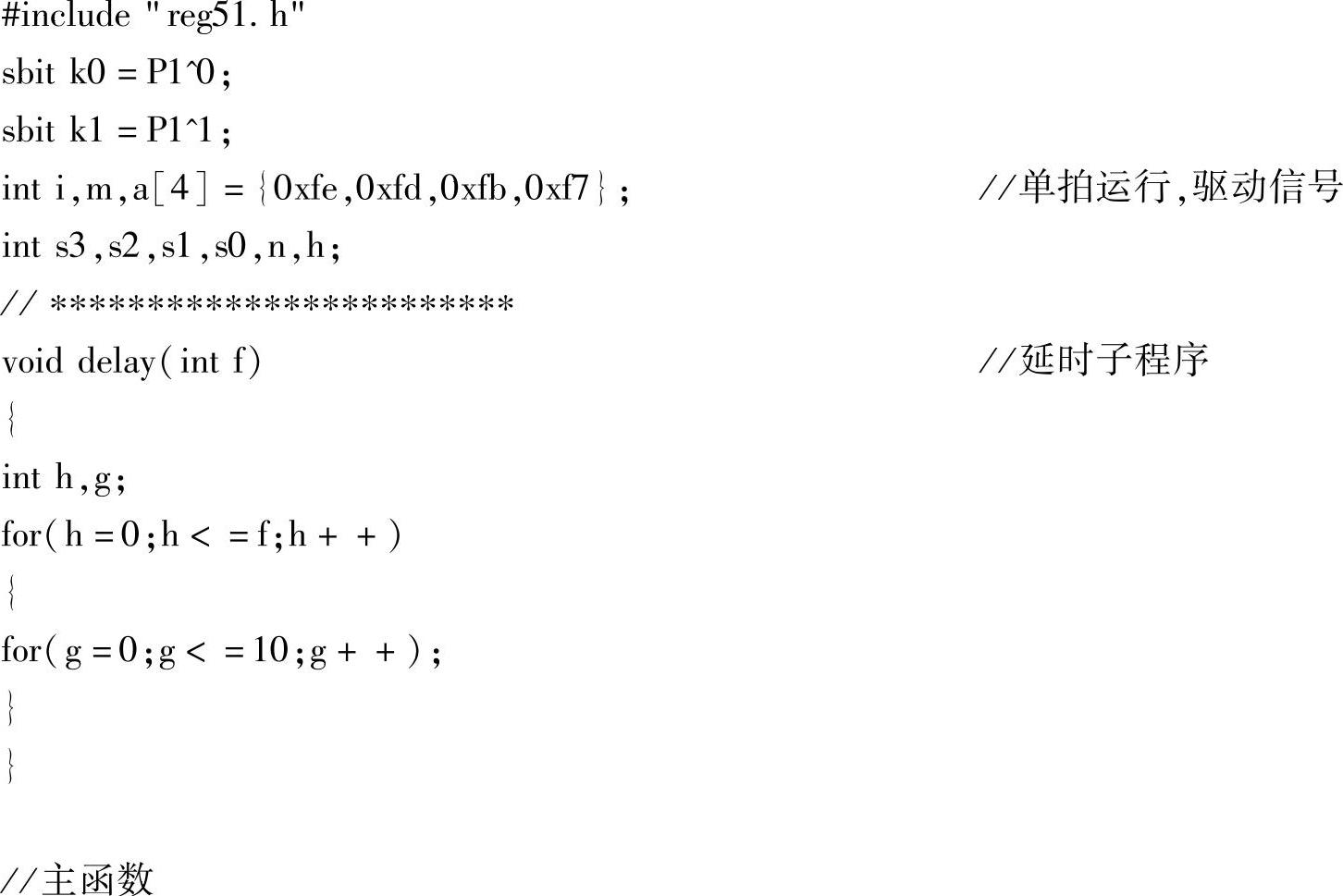
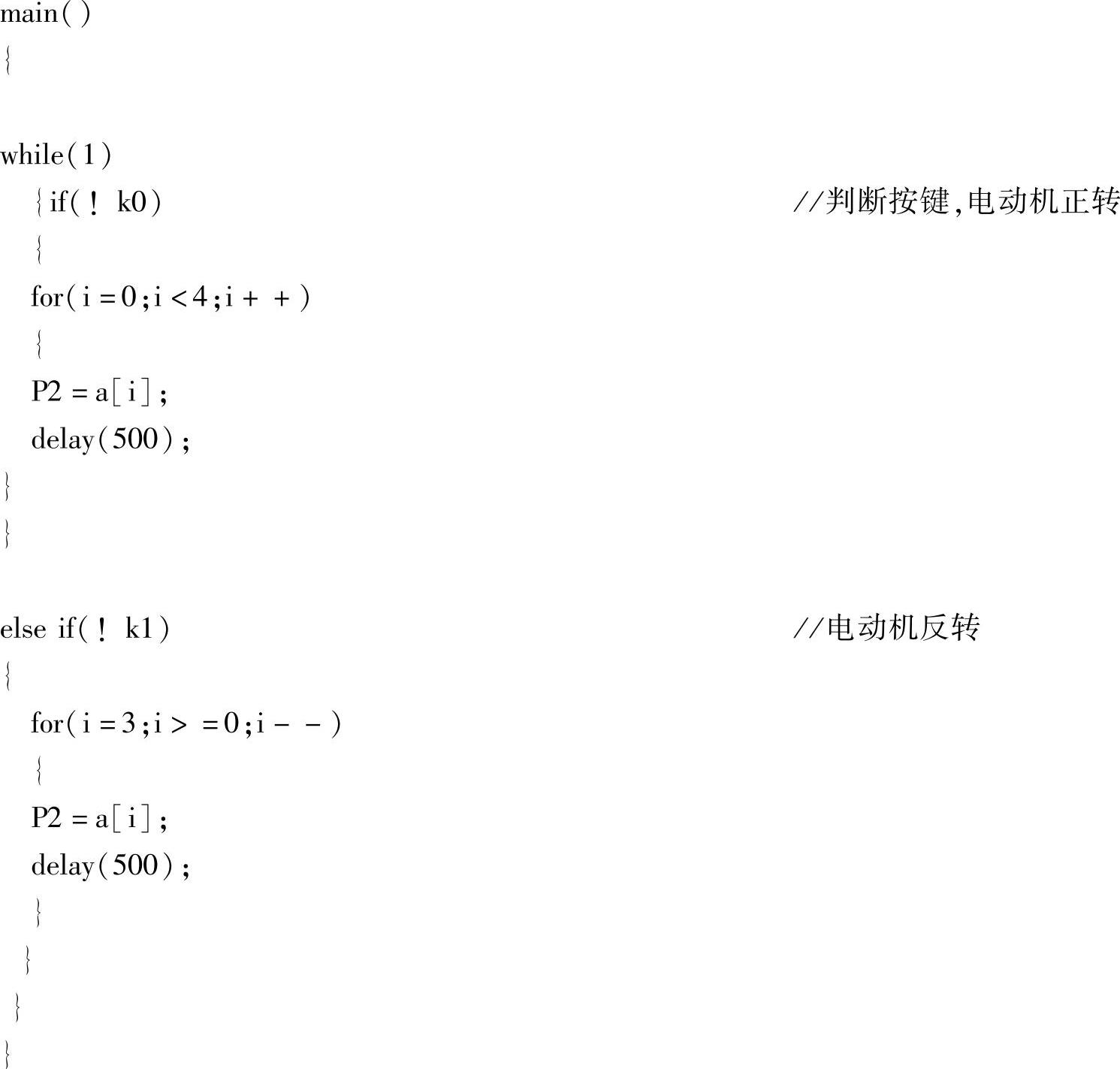
②C语言参考程序:
3.应用实例2
单片机控制步进电动机电路如图11-16所示,用两个按键分别控制步进电动机正转和反转。当S1键按下时,单片机的P1.3到P1.0接口按正向励磁顺序A→AB→B→BC→C→CD→D→DA→A输出电脉冲,电动机正转;当S2键按下时,单片机的P1.3到P1.0接口按反向励磁顺序A→DA→D→CD→C→BC→B→AB→A输出电脉冲,电动机反转,控制流程图如图11-17所示。
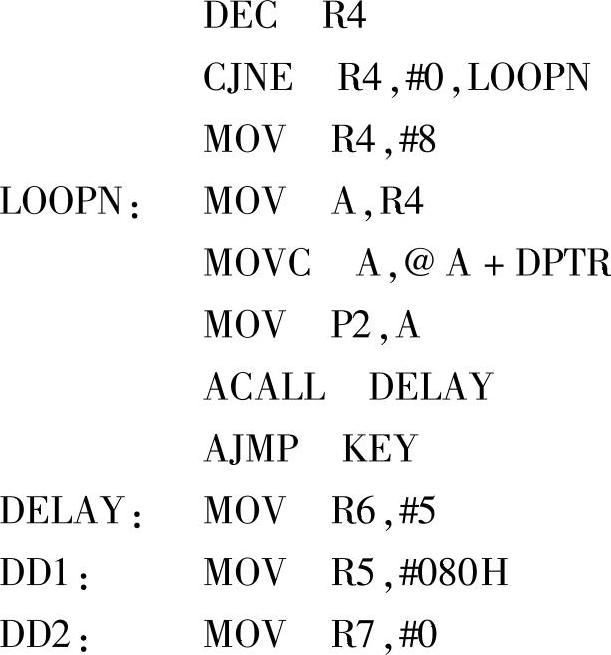
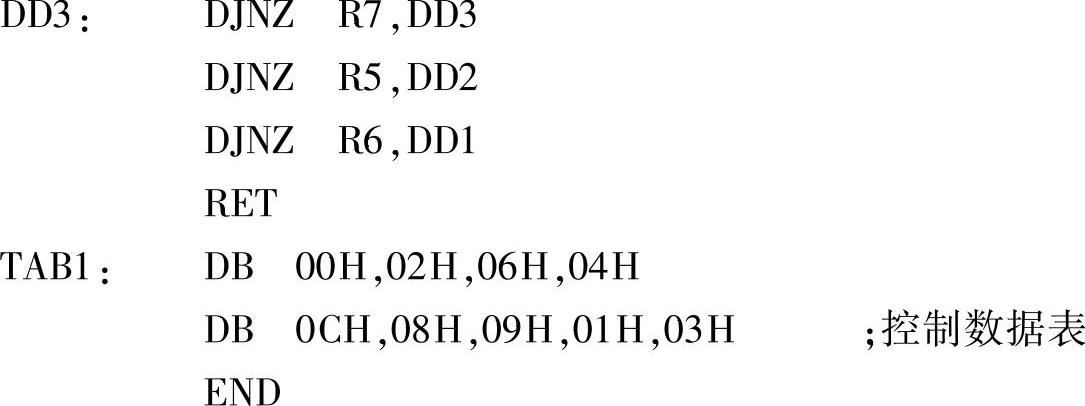
源程序:
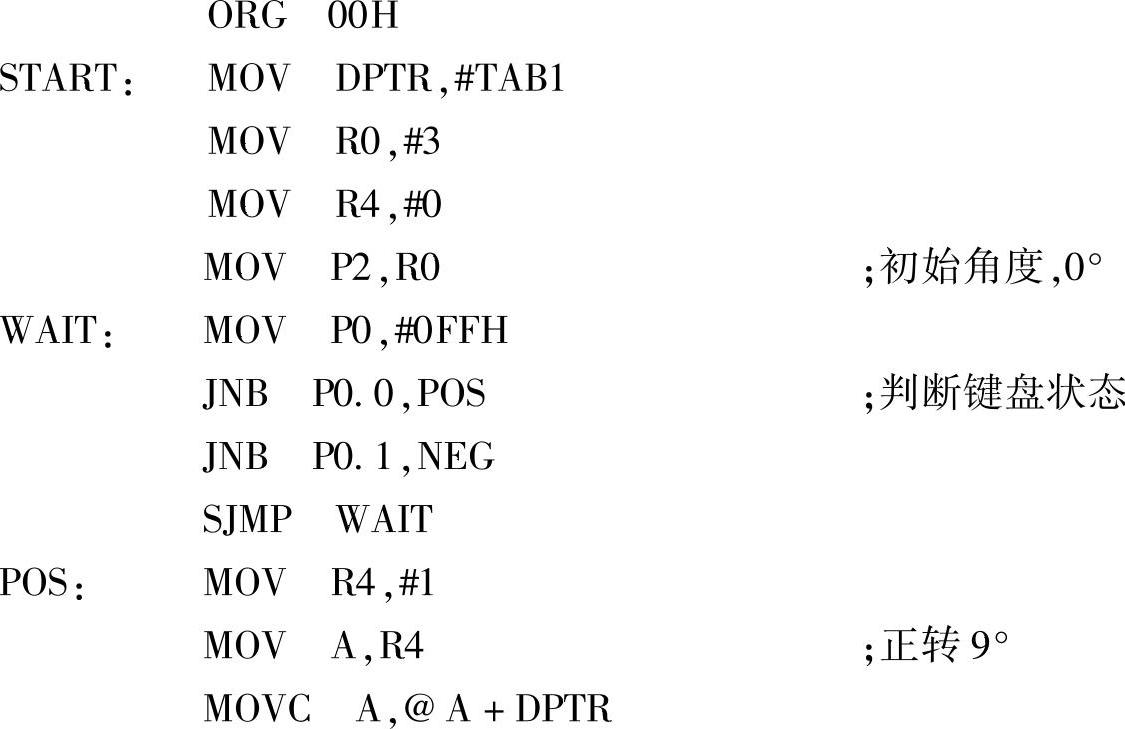
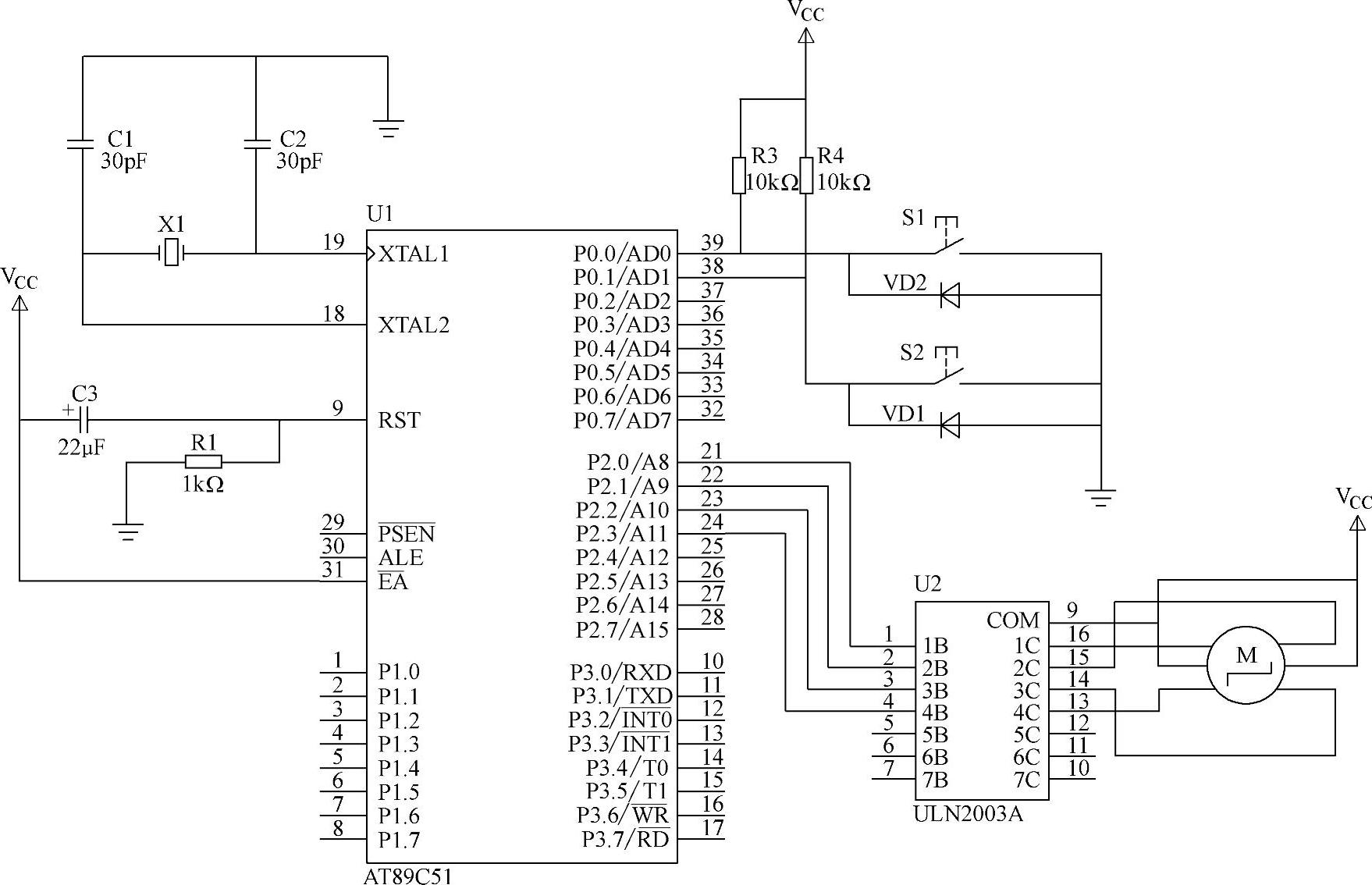
图11-16 单片机控制步进电动机电路图
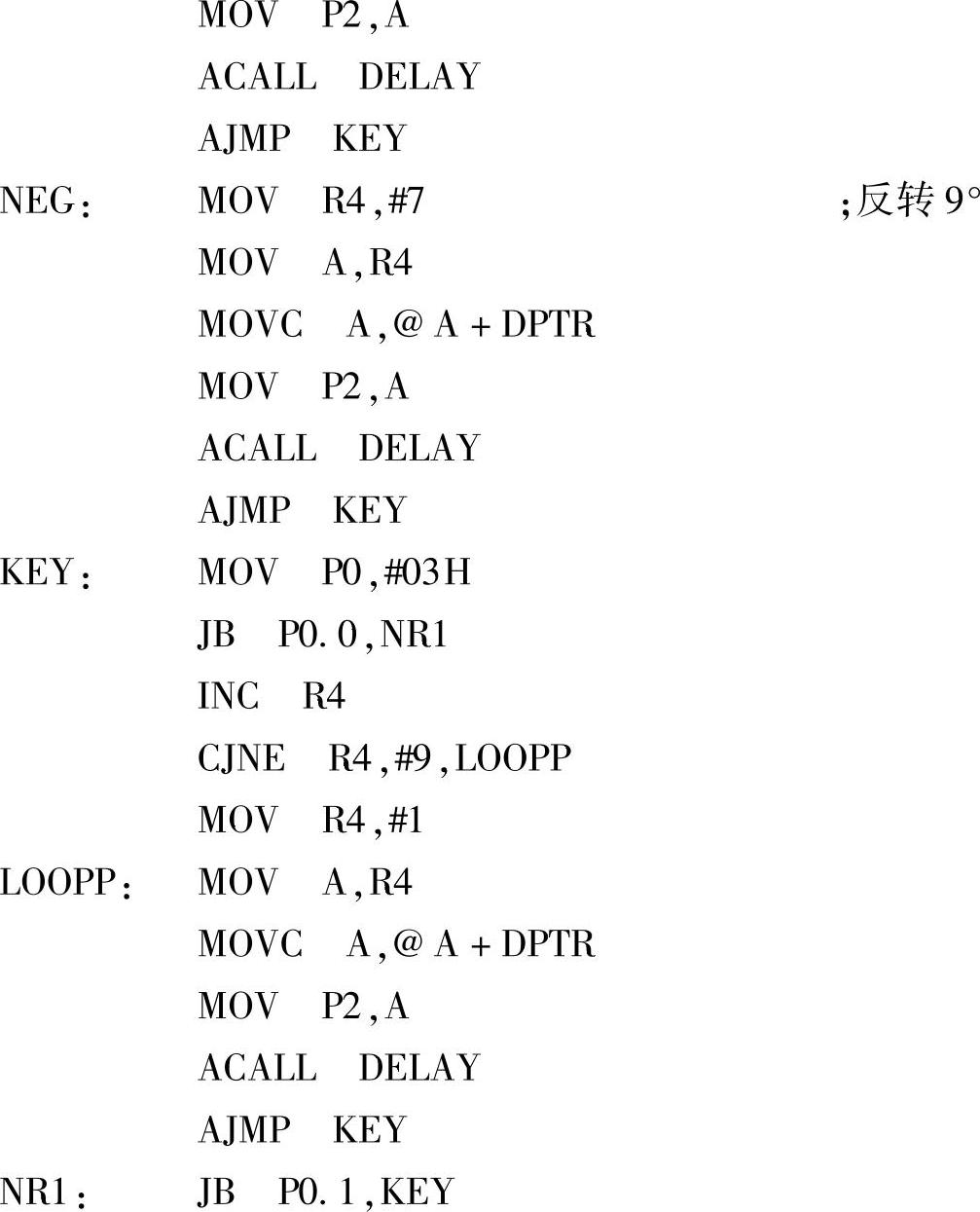
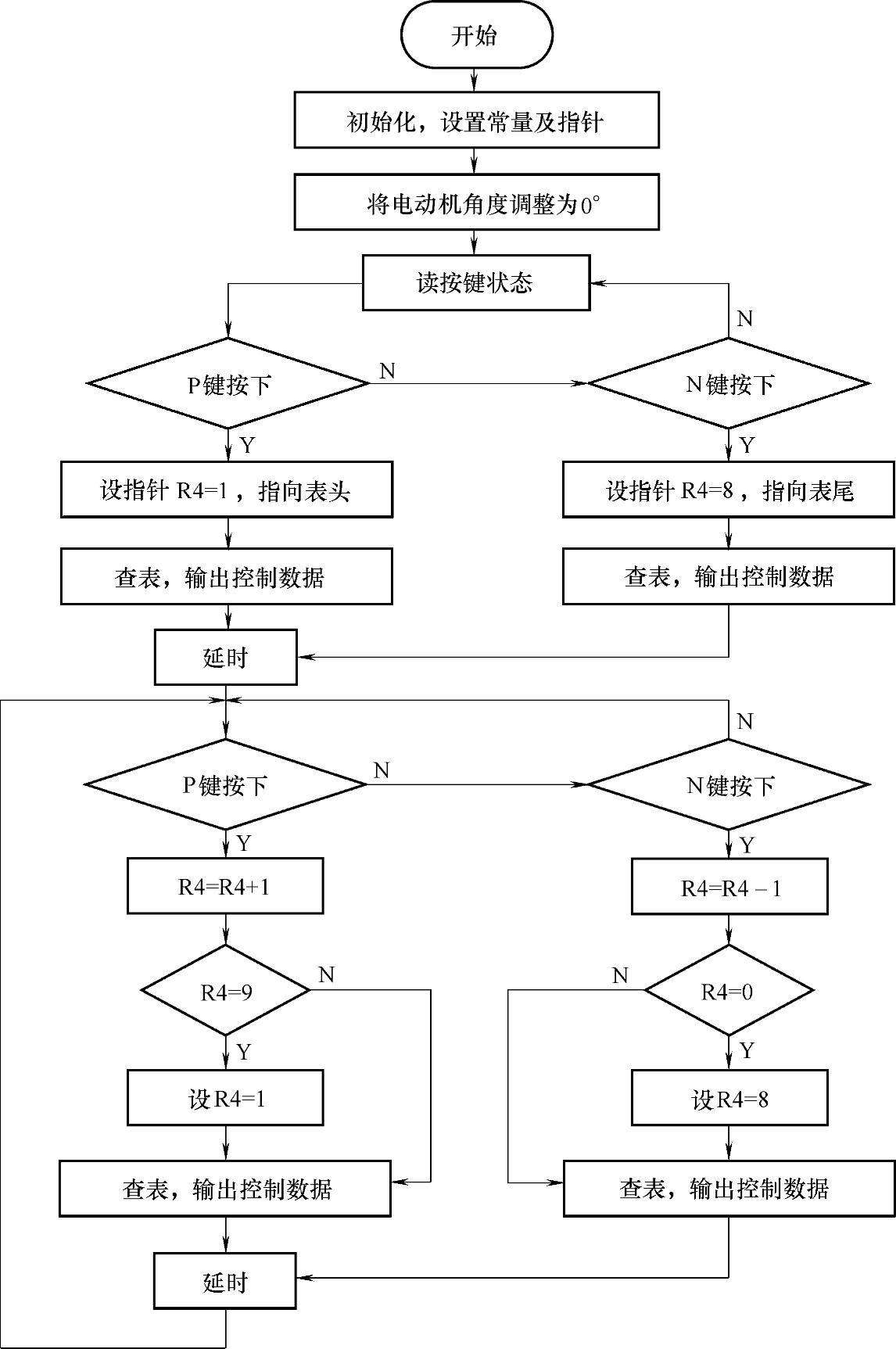
图11-17 控制流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。