



电动机pwm驱动模块的具体电路如图8-20所示。本电路采用的是基于pwm原理的h形桥式驱动电路。
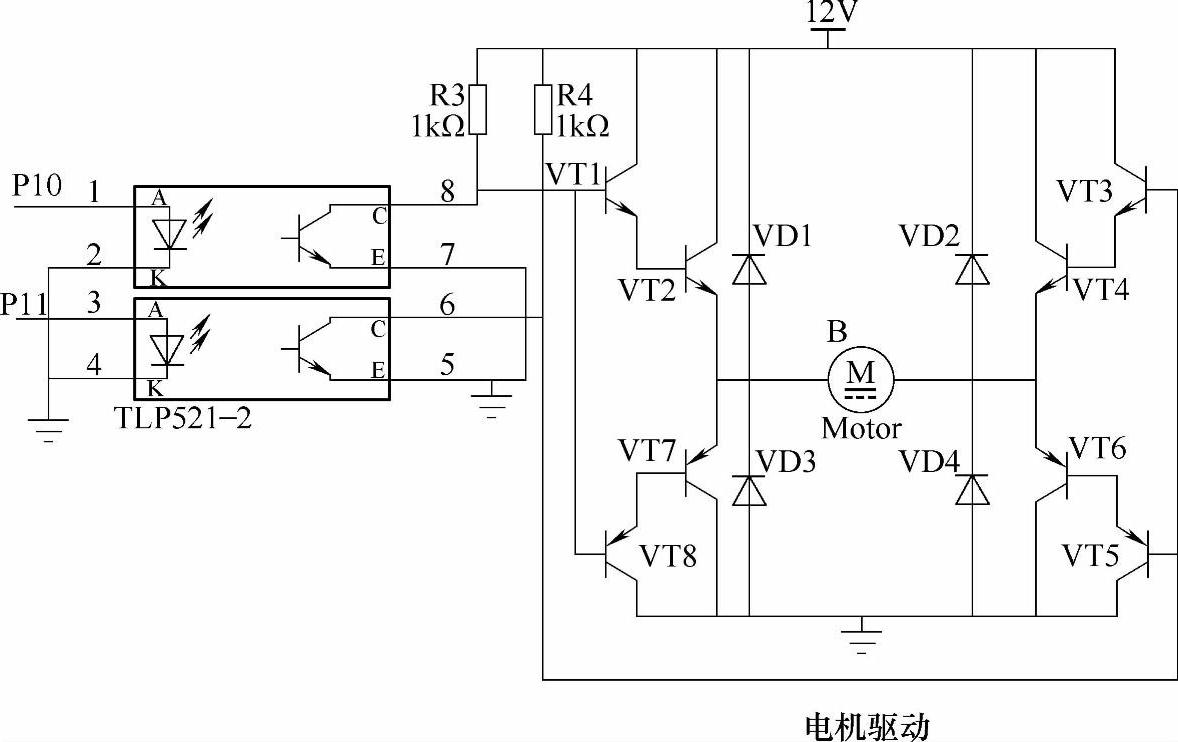
图8-20 直流电动机pwm驱动模块的具体电路
pwm电路由以复合管组成的h形桥式电路构成,4组晶体管以对角组合分为两组:根据两个输入端的高、低电平决定晶体管的导通和截止。4个二极管在电路中起防止晶体管产生反向电压的保护作用,并可防止电动机两端的电流和晶体管上的电流过大。
实验中的控制系统电压统一为5v电源,因此若复合管基极由控制系统直接控制,则控制电压最高为5v,再加上晶体管本身的压降,加到电动机两端的电压就只有4v左右,严重减弱了电动机的驱动力。基于上述考虑,采用tlp521-2光耦合器,将控制部分与电动机的驱动部分隔离开来。输入端各通过一个晶体管增大光耦合器的驱动电流;电动机驱动部分通过外接12v电源驱动。这样不仅增加了各系统模块之间的隔离度,也使驱动电流得到了大大的增强。
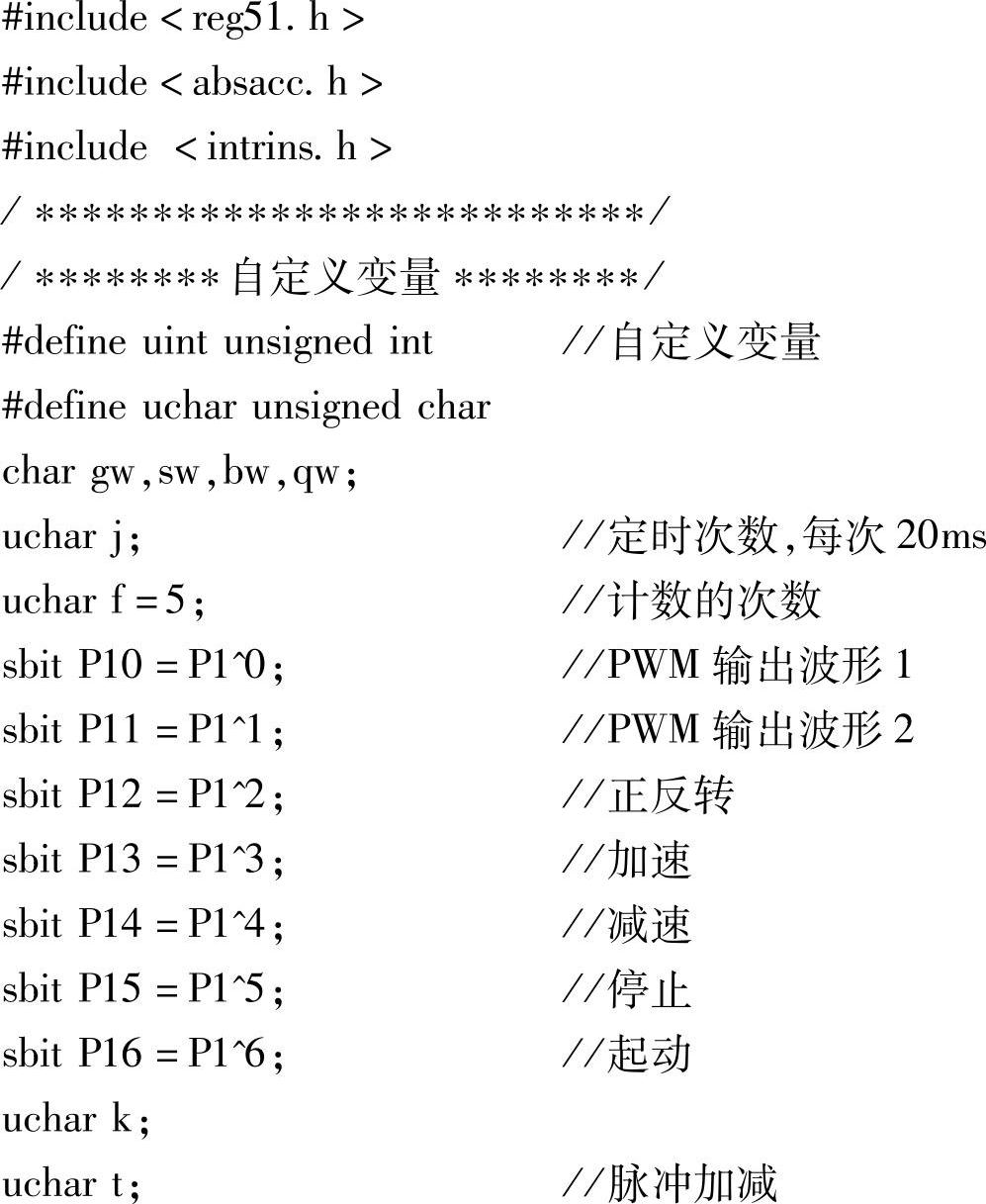
在电动机驱动信号方面,我们采用了占空比可调的周期矩形信号控制。脉冲频率对电动机转速有影响,脉冲频率高,则连续性好,但带负载能力差;脉冲频率低则反之。经实验发现,当电动机转动平稳时,如果增加负载,其速度下降明显,电动机处于低速平稳运行时甚至会停转。电动机的脉冲频率在10hz以下,电动机转动有明显跳动现象。具体采用的频率可根据个别电动机性能在此范围内调节。p10输入高电平信号,p11输入低电平,电动机正转;p10输入低电平信号,p11输入高电平,电动机反转;p10、p11同时为高电平或低电平时,电动机不转。对电动机转速的调节通过对信号占空比的调整来进行。
1.pwm脉宽控制
本实例中采用软件延时方式对脉冲宽度进行控制,延时程序函数如下:
2.键盘中断处理子程序(https://www.xing528.com)
采用中断方式,按下每个键时,自动完成延时去抖动、键码识别、按键功能执行。
要实现按住加/减速键不放时恒加或恒减速直到放开停止,就需在判断是否松开该按键时,每进行一次增加/减少一定的占空比。
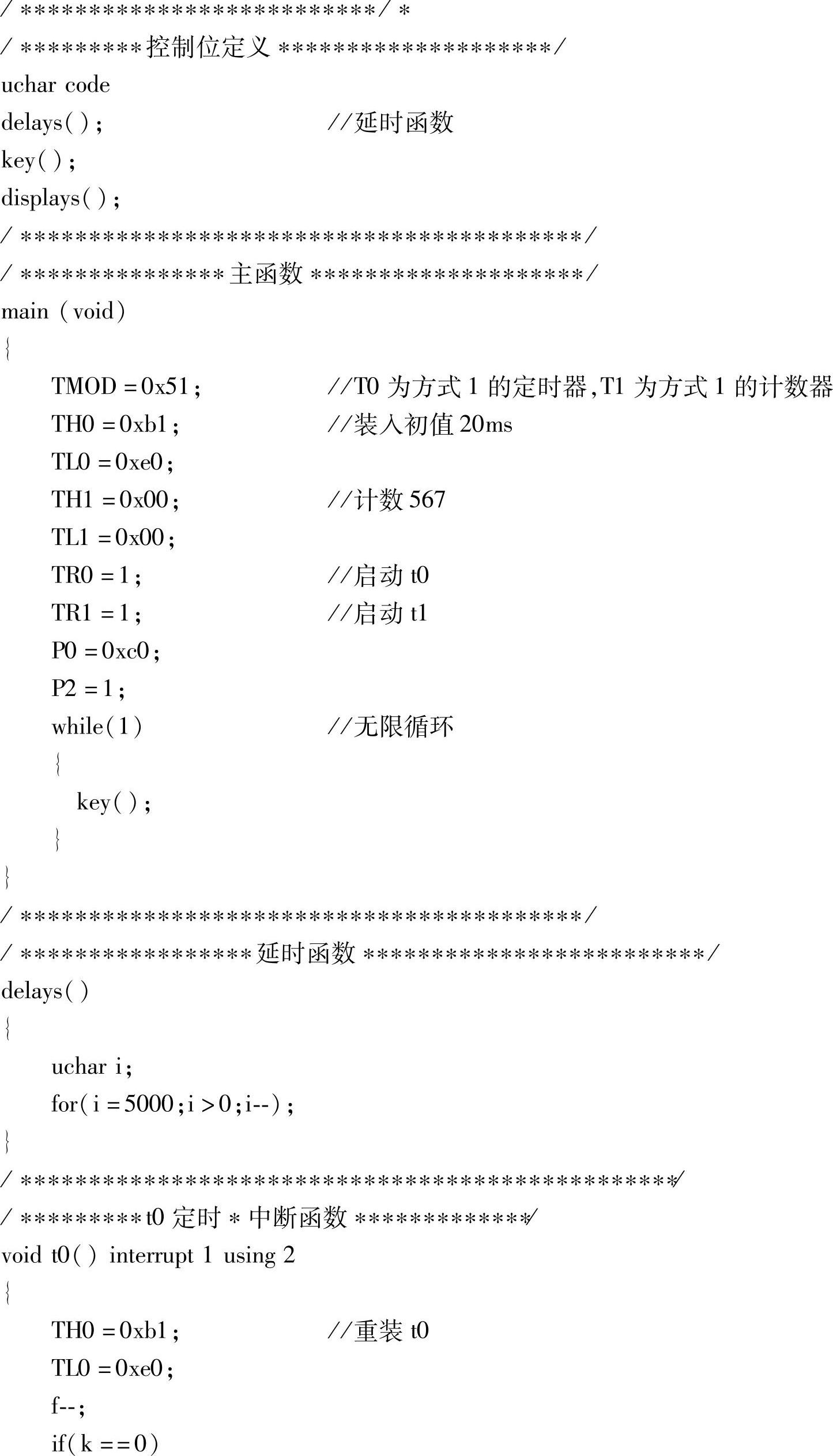
3.定时中断处理程序
采用定时方式1,因为单片机使用12mhz晶体振荡器,可产生最高约为65.5ms的延时。对定时器置初值b1e0h可定时20ms,即系统时钟精度可达0.02s。当20ms定时时间到,定时器溢出则响应该定时中断处理程序,完成对定时器的再次赋值,并对全局变量time加1,这样,通过变量time可计算出系统的运行时间,程序如下:
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。