



步进电机是纯粹的数字控制电机,它是将电脉冲信号转变为角位移或线位移的电磁机械装置。给电机加一个脉冲信号,电机则按设定方向转过一个步距角。其位移量(角度或长度)与输入脉冲个数有严格的对应关系,电机转速与输入脉冲频率能保持同步。步进电机实物图如图11-18所示。
可以通过控制脉冲个数来控制角位移量,达到精确定位的目的;可以通过控制脉冲频率来控制电机转动的速度和加速度,达到调速的目的。步进电机由于没有积累误差,因此是一种具有较高定位精度的执行元件。步进电机主要用于开环控制系统,当精度和速度有较高要求时也可采用闭环控制。步进电机主要由定子和转子构成。定子的主要结构是绕组,三相、四相、五相步进电机分别有3个、4个、5个绕组,其他依此类推。绕组按一定的通电顺序工作,这个通电顺序称为步进电机的“相序”。转子的主要结构是磁性转轴,当定子中的绕组在相序信号作用下有规律地通电、断电工作时,转子周围就会有一个按此规律变化的电磁场,因此一个按规律变化的电磁力就会作用在转子上,转子总是力图转动到磁阻最小的位置,正是这样,使得转子按一定的步距角转动,使转子发生转动。
图11-18 步进电机实物图
步进电机在自动化仪表、自动控制、机器人、自动生产流水线等领域的应用相当广泛,如在打印机、磁盘驱动器、扫描仪中都有步进电机的身影。关于步进电机工作原理请参考有关资料,本节介绍一种普通微型单极3相步进电机的控制。
单极3相步进电机有三个励磁励相,分别用A、B、C表示,每相有一个励磁线圈。通过控制三个励磁线圈电流的通断的先后时间顺序和通断频率就可以改变步进电机的旋转方向和控制转速,图11-19是单极3相步进电机的原理图。
单极3相步进电机有3相3拍和3相6拍两种驱动方式,图11-20给出它们的控制时序图。3相3拍就是A、B、C三相分别通电,正转为A-B-C-A-B-C,反转为A-C-B-A-C-B,每拍转动3°。3相6拍中有三拍是两相同时通电,正转为A-AB-B-BC-C-CA,反转为A-AC-C-CB-B-BA,每拍转动1.5°。
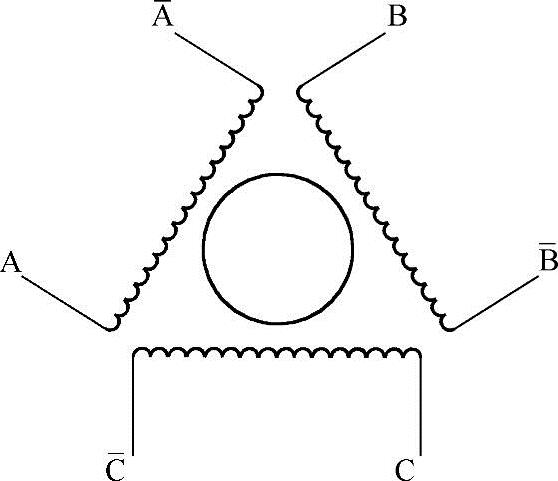
图11-19 单极3相步进电机原理图
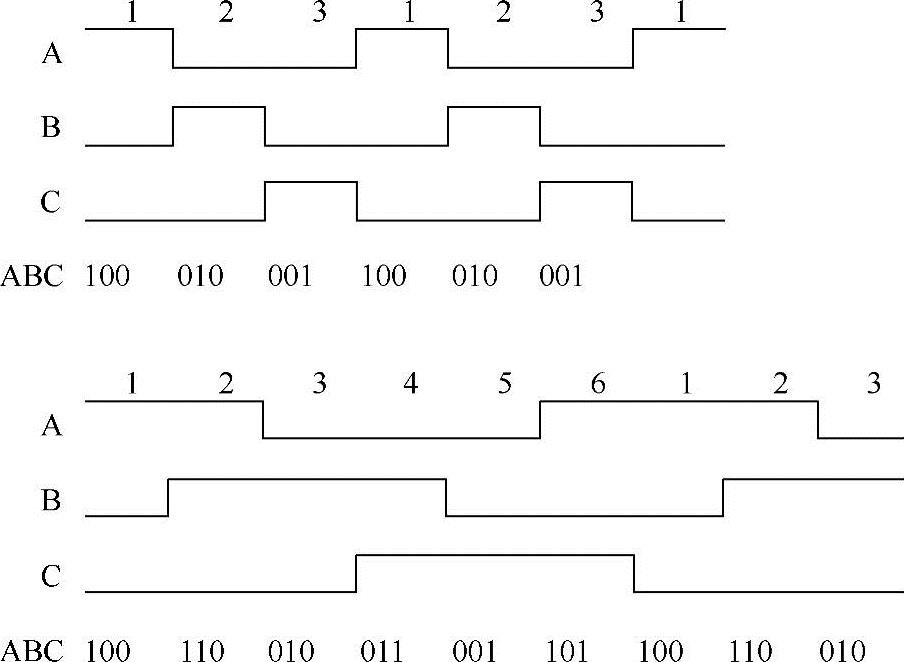
图11-20 3相步进电机控制时序图
步进电机的主要特性:
1)步进电机由脉冲信号来控制,如果变更输入脉冲的相序可以方便地改变电机的转向。变换通电的拍数,如三相六拍或三相三拍,相应地实现半步驱动与整步驱动,从而实行不同步距角的运行方式。
2)步进电机的动态响应快,易于起停、正反转及变速。步进电机具有半电流自锁功能,维持控制绕组的电流为额定电流的一半,电机便停在某一位置上不动,即步进电机有自整角能力,不需要机械制动。
3)通过细分驱动,消除了电机的低频振荡,提高了电机的输出转矩,提高步距精度,且没有累积误差。开环控制就能获得较高的控制精度。
4)调速范围宽,能达到1000r/min。速度可在相当宽的范围内平滑调节,低速下仍能获得大转矩。(https://www.xing528.com)
5)步进电机的缺点是电效率低,带负载的能力不大,起动转矩小,存在低频振荡和高频力矩不足的问题,必须进行细分驱动,改善电机运行性能。步进电机具有独特的优点,作为伺服电动机应用于速度、位置控制领域控时,往往可以使系统简化、工作可靠,而且获得较高的控制精度。因而成为经济型数控系统一种主要的伺服元件。在工业上尤其是用作状态伺服元件、状态指示元件、位置控制和速度控制元件。因此,目前打印机、绘图仪、机器人等设备都以步进电机为动力核心。
本实例对步进电机的控制电路如图11-21所示。采用功率元件UM2003直接控制一个5V的步进电机。
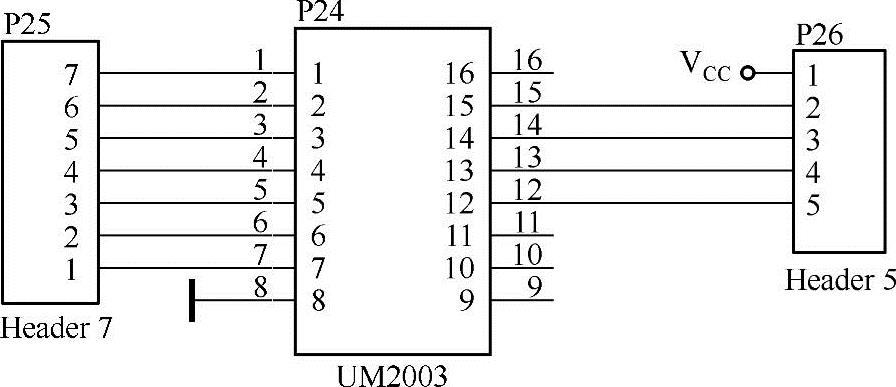
图11-21 UM2003驱动步进电机电路图
控制程序如下。
●目的:4相5线步进电机。
●功能:4相5线步进电机驱动。
●时钟频率:内部1MHz。
●编译环境:ICC-AVR6.31。
●使用硬件:步进电机与杜邦线。
●结果:连接硬件后,步进电机缓慢单向转动。
●操作要求:将点阵屏上的电源输入端接到5V的直流电源上。控制信号端口用杜邦线与单片机上相应的插针相连。


免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。