



ATmega16有5个复位源:
1)上电复位。电源电压低于上电复位门限VPOT时,MCU复位。
2)外部复位。引脚RESET上的低电平持续时间大于最小脉冲宽度时MCU复位。
3)掉电检测复位。掉电检测复位功能使能,且电源电压低于掉电检测复位门限VBOT时MCU即复位。
4)看门狗复位。看门狗使能并且看门狗定时器溢出时复位发生。
5)JTAGAVR复位。复位寄存器为1时MCU复位。
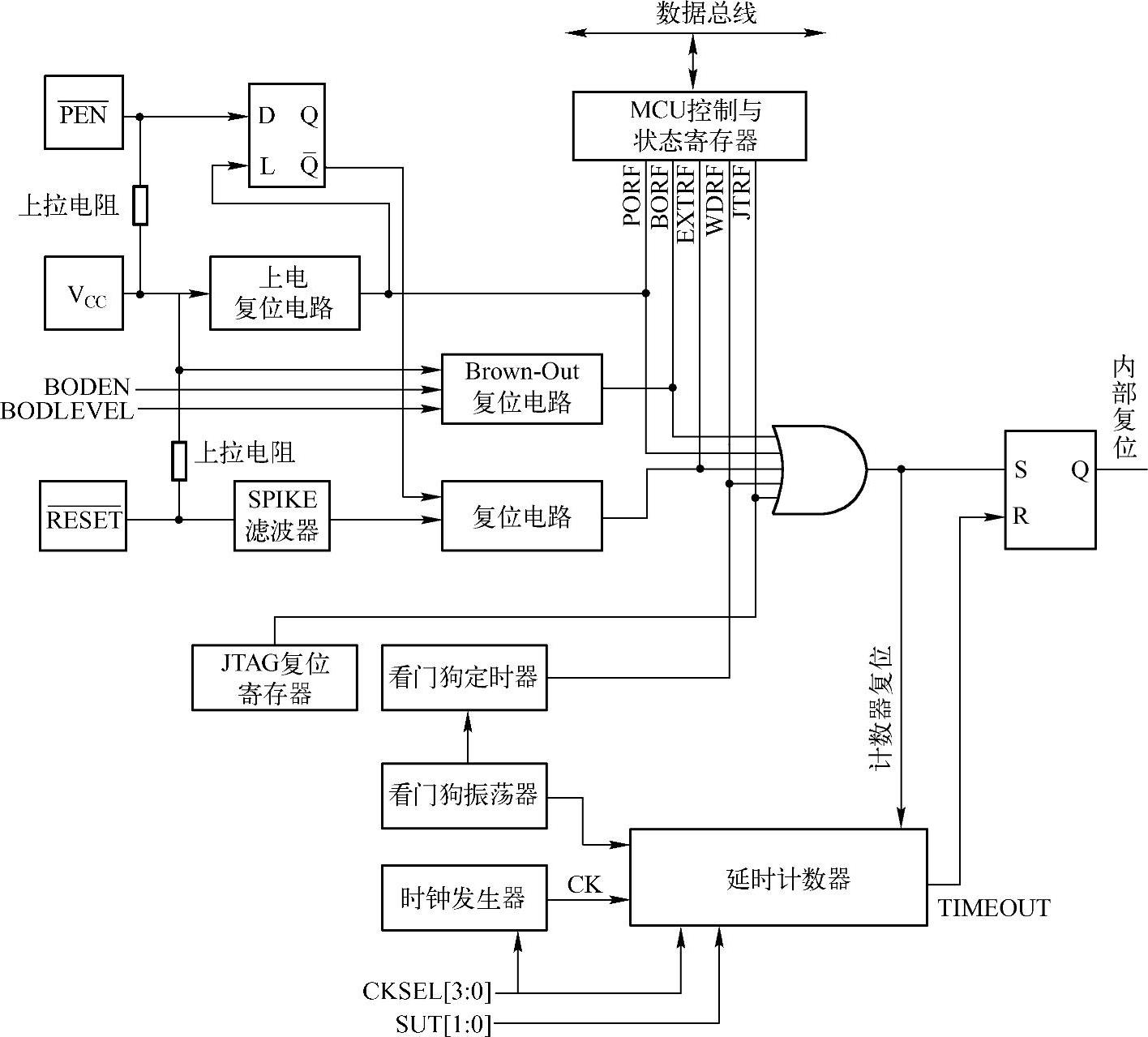
图2-11 复位逻辑
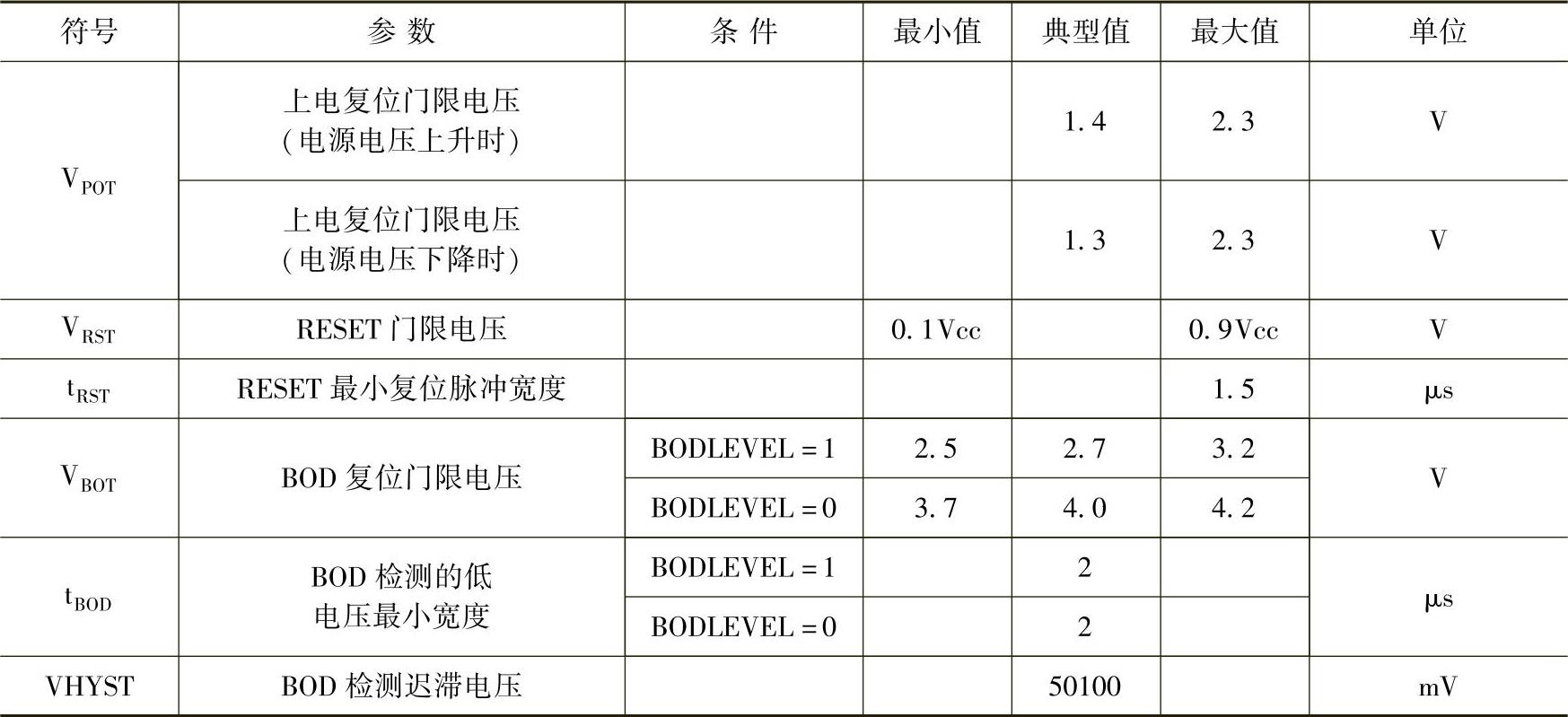
表2-18 复位特性
1.上电复位
上电复位(POR)脉冲由片内检测电路产生。检测电平参见表2-18。无论何时VCC低于检测电平POR即发生。POR电路可以用来触发启动复位,或者用来检测电源故障。
POR电路保证器件在上电时复位。VCC达到上电门限电压后触发延迟计数器。在计数器溢出之前器件一直保持为复位状态。当VCC下降时,只要低于检测门限,RESET信号立即生效。图2-12和图2-13所示为RESET信号由不同的控制信号控制时,MCU的启动时序图。
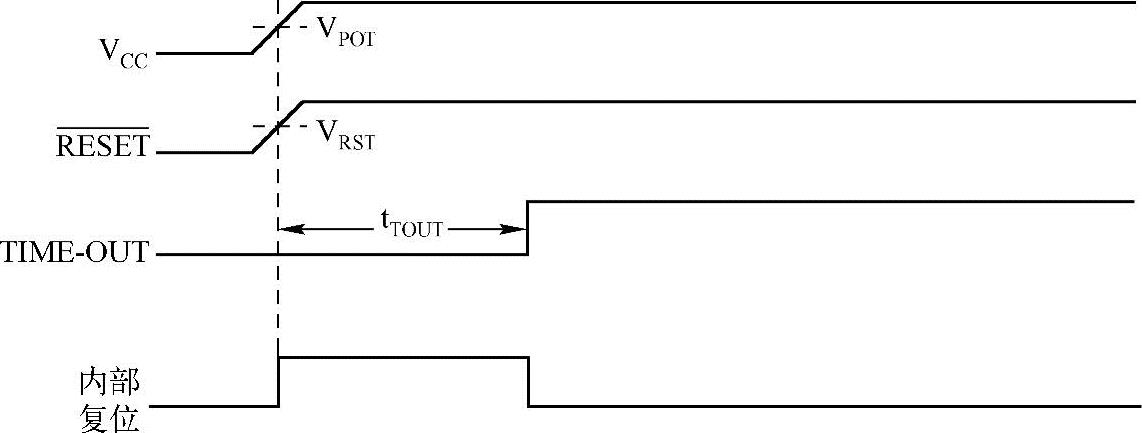
图2-12 MCU启动过程,RESET连接到VCC
 (https://www.xing528.com)
(https://www.xing528.com)
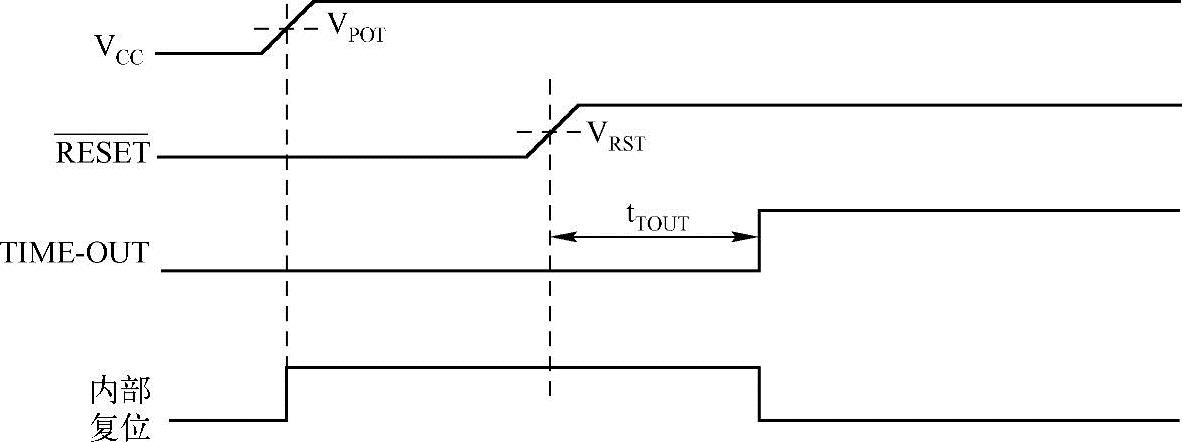
图2-13 MCU启动过程,RESET由外电路控制
2.外部复位
外部复位由外加于RESET引脚的低电平产生。当复位低电平持续时间大于最小脉冲宽度时(详见表2-18)即触发复位过程,即使此时并没有时钟信号在运行。当外加信号达到复位门限电压VRST(上升沿)时,tTOUT延时周期开始(见图2-14)。延时结束后MCU即启动。
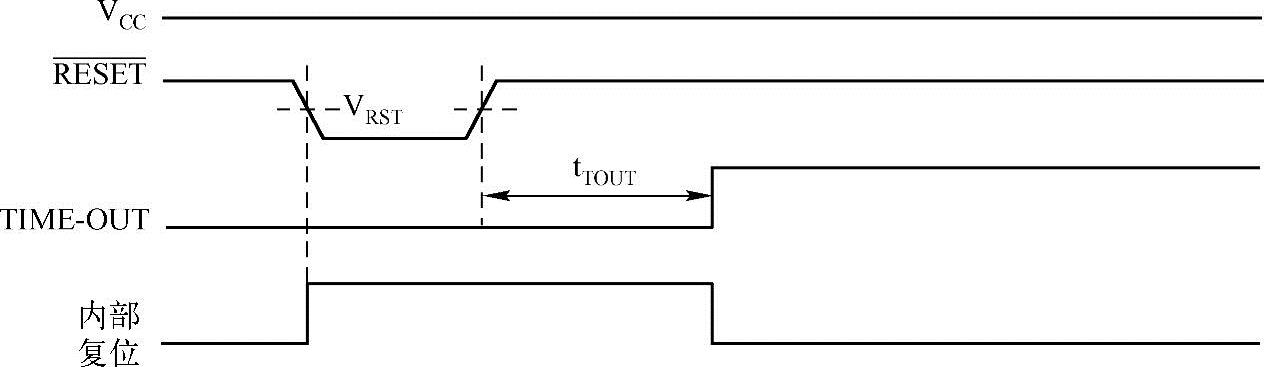
图2-14 工作过程中发生外部复位
3.掉电检测复位
ATmega16具有片内BOD(Brown-outDetection)电路,通过与固定的触发电平的对比来检测工作过程中VCC的变化。此触发电平通过熔丝位BODLEVEL来设定,2.7V(BODLEV-EL未编程),4.0V(BODLEVEL已编程)。BOD的触发电平具有迟滞功能,以消除电源尖峰的影响。这个迟滞功能可以解释为VBOT+=VBOT+VHYST/2以及VBOT-=VBOT-VHYST/2。
BOD电路的开关由熔丝位BODEN控制。当BOD使能后(BODEN被编程),一旦VCC下降到触发电平以下(VBOT-,见图2-15),BOD复位立即被激发。当VCC上升到触发电平以上时(VBOT+,见图2-15),延时计数器开始计数,一旦超过溢出时间tTOUT,MCU即恢复工作。如果VCC一直低于触发电平并保持如表2-18所示的时间tBOD,BOD电路将只检测电压跌落。
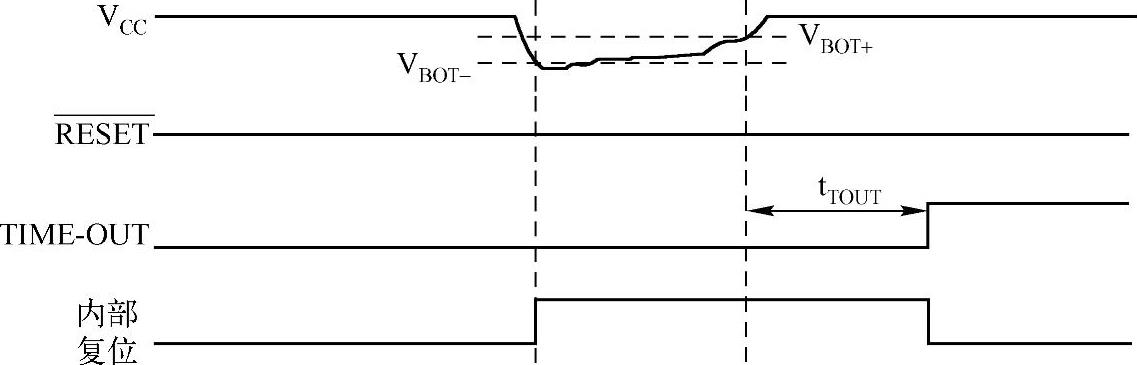
图2-15 工作过程中发生掉电检测复位
4.看门狗复位
看门狗定时器溢出时将产生持续时间为1个时钟周期的复位脉冲。在脉冲的下降沿,延时定时器开始对tTOUT计数。图2-16所示为工作过程中发生看门狗复位的过程。
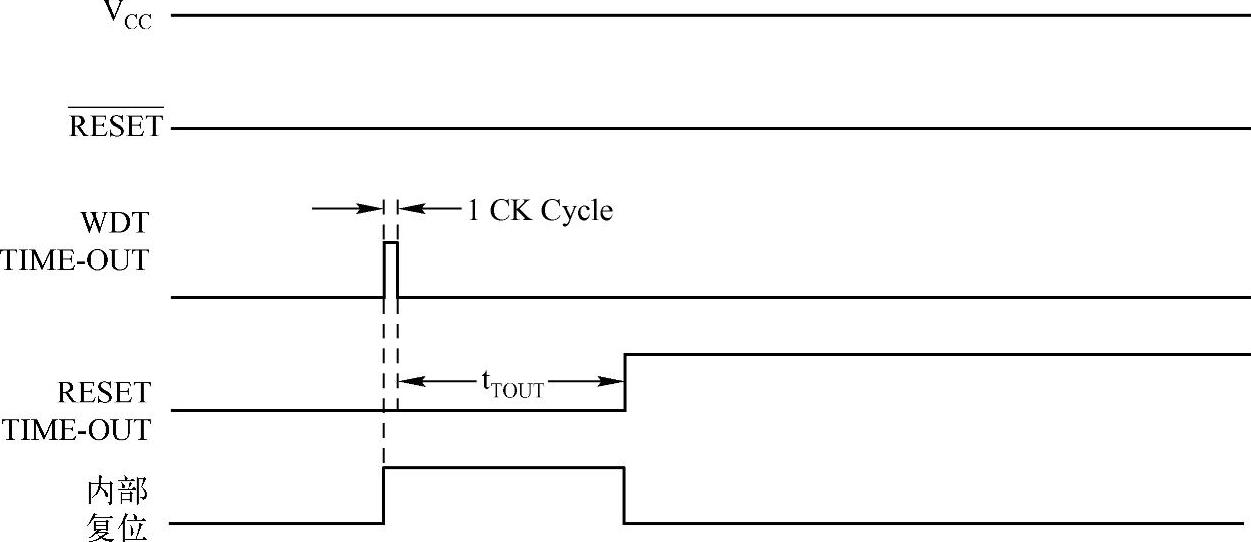
图2-16 工作过程中发生看门狗复位
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。