



车辆导航系统是指采用车载GPS定位装置确定车辆的行驶位置,与预先存储的数字地图数据进行地图匹配,实时动态地显示车辆在路网中的位置,并优化车辆到达目的地的最佳路径以及达到相应路段后的路径诱导。
车辆导航系统实现的主要功能有:
(1)车辆定位 通过车载GPS接收机接收卫星信号,并进行地图匹配后在电子地图上显示出车辆的实际位置。
(2)路径规划 根据驾驶人目的地及设定的起点和终点,导航软件按“最短路径”原则设计路径,自动建立路径库。
(3)按设计路径进行导航 车载显示器将在电子地图上显示设计的路径,同时显示汽车运行的路径和方向,告诉驾驶人到达下一个目的地的剩余距离和驾驶路径。
(4)査询功能 系统提供包括社会公用信息等在内的信息供用户査询,査询结果以图像及语音的形式显示,并通过显示器在电子地图上给出。
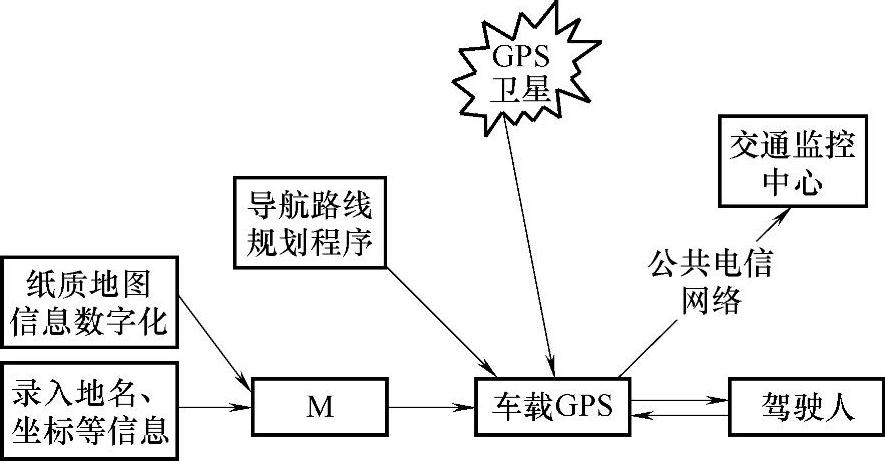
图9⁃34 汽车GPS导航系统的工作原理(https://www.xing528.com)
汽车GPS导航系统主要由GPS接收器、车载导航ECU、液晶显示器、车载传感器和CD⁃ROM驱动器等部分组成。汽车GPS导航系统的工作原理如图9⁃34所示。
车辆定位包括车辆当前的位置(经度、纬度、髙度、时间)和车辆在地图上的相对位置。完成此功能需要进行航位测定(Dead⁃re⁃ckoning)、地图匹配(Map⁃matching)和绝对位置校准(GPS)。
航位测定通常使用传感器(包括装在非驱动车轮上的速度传感器、测定方向的电子罗盘等)所提供的距离、速度及方向等数据来计算车辆位置。由于车轮倾斜、轮胎压力变化等原因,航位测定很容易产生误差,并具有累加效应,需要使用地图匹配技术和全球定位系统对产生的误差进行修正。
地图匹配是指利用各种数据(传感器数据、数字地图、最优路径等)确定车辆在地图上的相对位置。该过程把航位测定所得到的路径与数字地图中道路线形及最优路径相比较,来确定车辆的准确位置,并将输出反馈给航位测定,以修正航位测定过程的误差。
车辆诱导是指根据道路交通法规、最优路径,通过导航软件和数字地图对行驶出发地至目的地进行最佳路径的检索,在行驶中具有瞬时再检索功能,及时显示各路口的标志并在到达路口前给出声音提示或屏幕显示,引导驾驶人实现路径选择。
车辆诱导方式可分为静态路径诱导和动态路径诱导。按照固有的信息决定路径的自治诱导,称为静态路径诱导。按照固有的信息并同时利用接收到的道路实时信息(交通事故、道路施工等)决定路径的自治诱导,称为动态路径诱导。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。