



为了提高汽车的安全性、经济性和舒适性,电子技术在汽车上被广泛应用。汽车上应用的电子控制装置(见图9⁃28)也越来越多,如果仍采用常规的布线方式,将导致车上导线数量急剧增加,从而增加成本、降低车辆的可靠性并增加维修难度。一辆采用传统布线方法的高档汽车,其导线长度可达2000m,电气节点达1500个,导线的质量可以达到40~60kg。为便于多个电子控制单元之间相互连接、协调工作和信息共享,汽车控制器局域网络(Controller Area Network,CAN)应运而生。
早期的汽车网络没有自身的通用网络标准,而是采用一些现有的常规标准。汽车生产厂家也主要沿用汽车技术的传统发展模式,根据需要和以往的基础来开发网络系统,开放性很差。
20世纪80年代初,CAN是德国博世公司为了解决汽车众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议。汽车CAN总线的技术背景来源于工业现场总线和计算机局域网这样非常成熟的技术,因此具有很高的可靠性和抗干扰性。
CAN经过多次修订,于1991年9月形成技术规范2.0版本。该版本包括2.0A和2.0B两部分。其中2.0A给出了报文标准格式,2.0B给出了报文标准和扩展两种格式。推出2.0B是为了满足美国汽车制造商对C类网应用的要求。1993年11月国际标准化组织正式颁布了CAN国际标准ISO11898,为CAN标准化、规范化的推广铺平了道路。
20世纪90年代以后,车上媒体网络、线控系统网络和智能交通系统网络的研究开始兴起,在网络协议、支撑软硬件技术和元器件等方面多处于试制性阶段。线控系统网络协议主要有两个选择:一个是TTP/C(Time Triggered Protocol/SAE Class C,是满足SAEC级网络标准的时间触发协议),目前有奥迪、大众、霍尼韦尔和德尔福等公司倾向于选用这个协议作为线控网络的协议标准;另一个是FlexRay,其动态部分为byteflight协议,这是一种既支持时间触发访问方式,又支持事件触发访问方式的协议,目前有宝马、摩托罗拉,飞利浦半导体、博世和通用等公司倾向于选用这个协议作为线控网络的协议标准。为了弥补CAN事件触发访问方式在实时控制应用中的缺陷,博世也推出了支持时间触发访问方式的CAN协议,TTCAN。(https://www.xing528.com)
随着汽车视听设备、通信设备和信息服务设备的广泛应用,1998年宝马、戴姆勒⁃克莱斯勒、哈曼和OASIS等公司或组织建立了在汽车上推广使用汽车媒体网络MOST标准的合作机构,车上媒体网络从此诞生。
美国汽车工程师协会(SAE)按照性能将汽车网络系统由低到高划分为三个等级标准:A级、B级和C级网络。A级网络数据传输速度小于10kbit/s,主要用于要求价格低,数据传输速度、实时性、可靠性要求较低的情况,如车身系统的门窗和行李箱网络系统。A级网络也作为一些传感器和执行器级别的底层局部连接总线使用。B级网络数据传输速度为10~125kbit/s,主要用于对数据传输速度要求较高的系统,包括一些车身控制系统、仪表盘、低档的实时控制系统以及故障诊断系统等。C级网络数据传输速度为125~1000kbit/s,主要用于可靠性和实时性要求较高的系统,如发动机和动力传动系统的实时控制系统、线控系统等。
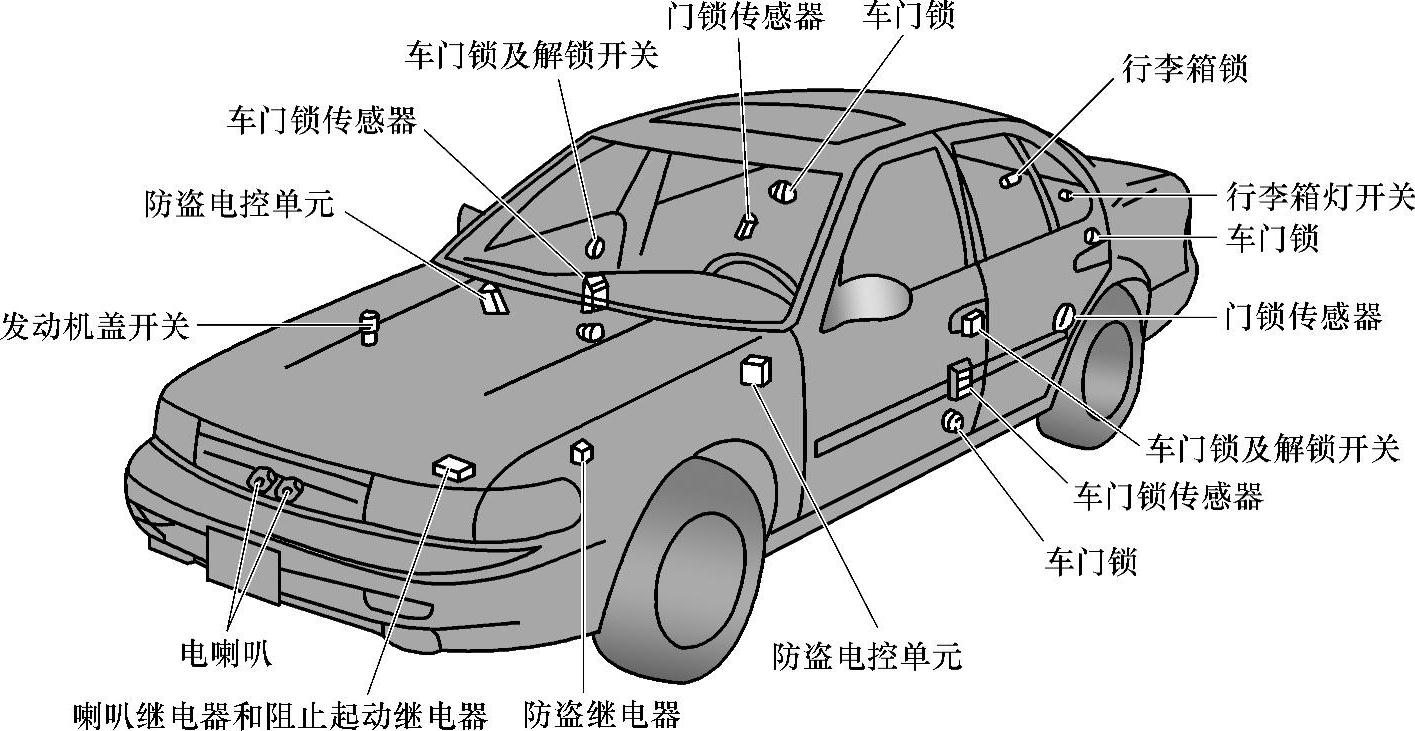
图9⁃28 汽车上应用的电子控制装置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。