



运动小车就是一个机器人。2004年1月,美国先后有“勇气”号和“机遇”号一对火星探测器成功登陆火星,它们就是机器人火星车。它们有自己的大脑、颈、头、眼睛、手臂,当它们发现值得探测的目标时,就会以6个轮子当腿,运动至目标面前,然后伸“手”进行考察。它们依靠太阳能电池板获得能源,用轮子在火星上漫步。这节课我们先从学习制作一辆机器人运动车开始。
知识
一、机器人搭建的技巧
对乐高搭建初学者来说,认识乐器件不只是入门的最基本要求,而要搭建出美观、稳固的结构就必须掌握一些基本的搭建技巧。我们知道任何复杂的结构都可以分割为最基本结构,如果掌握了搭建的基本技巧,就可以将简单的模块(结构)叠加为复杂模块,同时也有利于入门者一开始就能在有设计方案的前提下搭建,而不是盲目的搭建。
在机器人的设计中,机械结构是完善系统的一个重要因素。要认识各种各样的传动机构,了解其工作原理及其优缺点,有助于我们选择在什么时候用哪种传动系统最有效,从而设计出出色的机器人系统。其中机械结构上的设计非常重要,在设计过程中要注意以下几点:
1.采用分层的设计方法
在设计过程中为了使构建的机器人结实,结构设计非常重要,一定要根据要完成的任务合理设计。轻巧、稳固的结构不一定就需要很多组件,而在于设计中的技巧。
2.采用模块化设计,用最少的部件搭出稳定的结构
设计机器人时,最好使机器人结构便于拆卸,确切地说,将机器人的结构模块化。将机器人模块化的好处还有,可以在需要的时候将一些组件用在其他项目上,而无须重新搭建这些结构。
3.平衡,是车辆稳定运行的关键
小车的平衡问题至关重要,尽量降低小车的重心,以减小惯性及其不稳定性。试着将主控器放在不同位置,使小车最好地适应加速、减速过程。
二、LEGO EV3器件介绍
1.EV3主控器
EV3主控器(图16-1)是新一代的NXT控制器,它的按钮可以发光,根据光的颜色可看出EV3的状态,它具有更高分辨率的黑白显示器,内置扬声器,USB端口,一个迷你SD读卡器,四个输入端口和四个输出端口。支持USB2.0、蓝牙、WiFi与电脑通讯。还有一个编程接口用于编程和数据日志上传和下载。兼容与移动设备(安卓、IOS),由AA电池或EV3充电直流电池供电。

图16-1 EV3主控器
技术规格:
处理器:ARM 9处理器,300MHz,基于Linux操作系统。
输入端口:4个输入端口,1000/s的采样率。
输出端口:4个。
存储:内置16MB的ROM和64MB的RAM。支持最高32GB mini SD卡拓展。
按键:可发出三种颜色的六个按钮。并且通过颜色表明活动状态。
屏幕:分辨率178×128像素,能更好地查看详细图形和传感器数据。
拓展:通过EV3左侧的标准USB(EV3有两个USB,一个是mini USB用于程序下载,一个是标准USB用于拓展)可连接外部WiFi、蓝牙适配器等外置设备。
通讯:可使用USB2.0、WiFi通信。
电池:可使用6节AA电池,或者原装2050mA·h的锂电池。

图16-2 马达
2.伺服电机
机器人靠什么来运动呢,俗称马达(图16-2),马达的内部其实是一个发电机,其通过一系列的减速传动,可以形成更大的力,这个马达的内部有芯片,可以精确记录圈数等一系列马达参数,我们称为“伺服电机”,它作为机器人的动力来源,内置角度传感器可以测量速度和距离,能准确地控制电机转动精度,可以精确到1°以内。外观容易连接。微型伺服电机比正常的伺服电机扭力小,速度高,更快反应时间和更小的体积。EV3大型马达的技术参数:测速反馈精度为160~170RPM,运行扭矩约为30oz[1]×in,失速转矩约为60oz×in。
实践
1.任务要求
要求制作一个运动车模型,如图16-3所示。
(1)小车要坚固、稳定,跑得又稳又好,不会散架,不会掉零件。
(2)小车能够实现前进、后退、转向功能,外观合理美观,操作简单。
(3)结构设计合理,小车重量尽量轻便(所用器件越少越好)。
2.准备材料
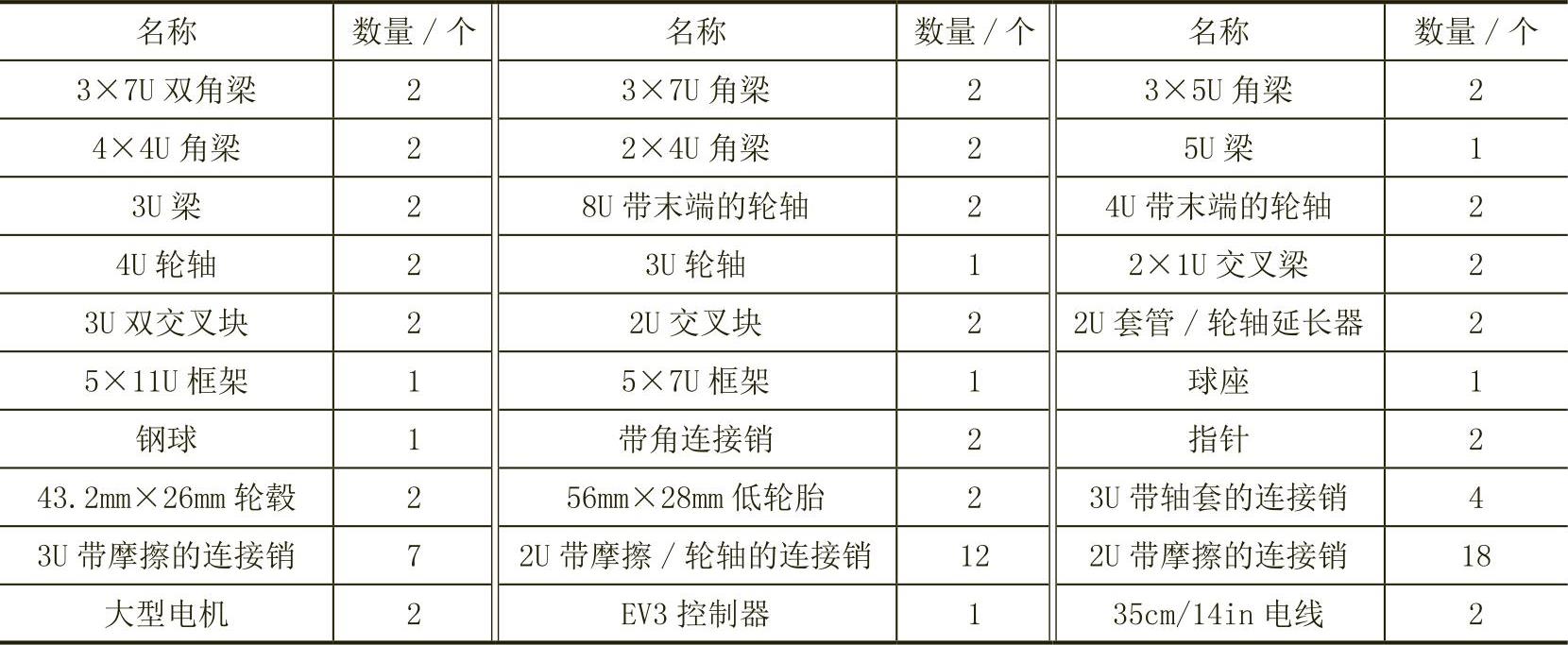
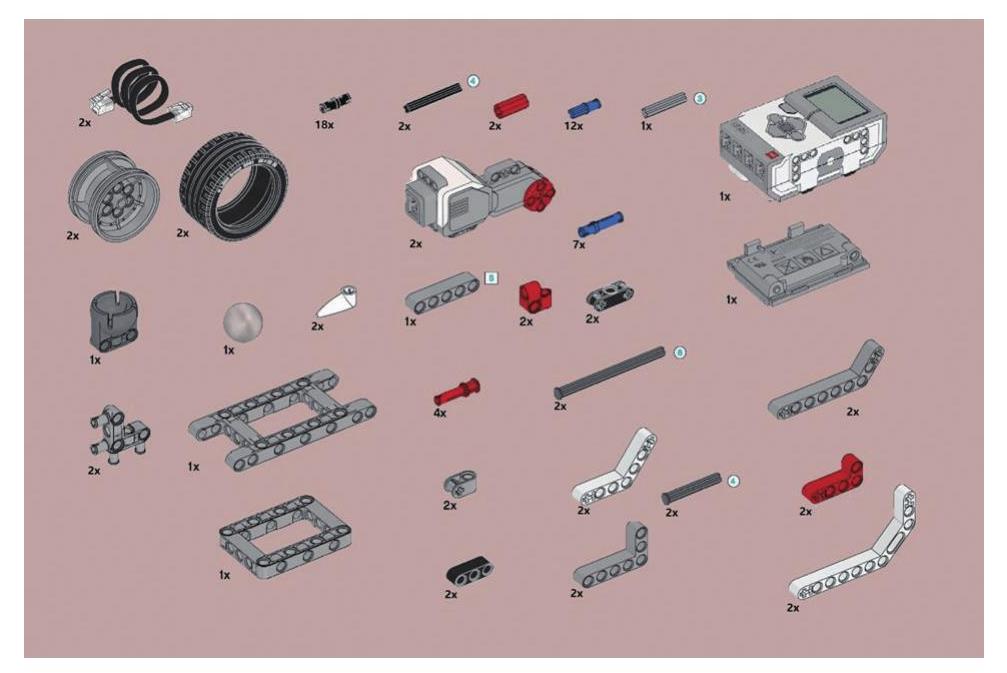
图16-3 小车零件图
3.动手搭建
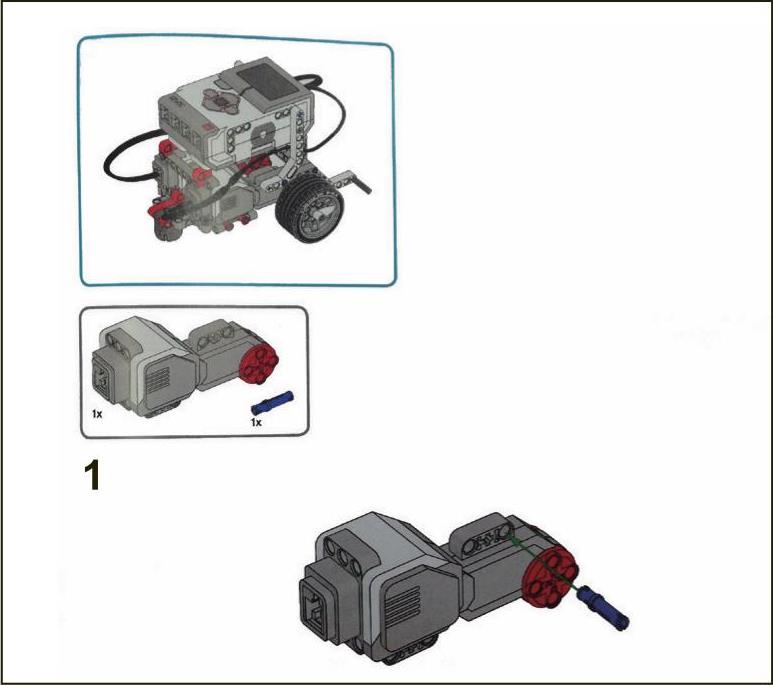
图16-4
第一步:准备1个大号马达和一个长连接销,如图16-4所示。
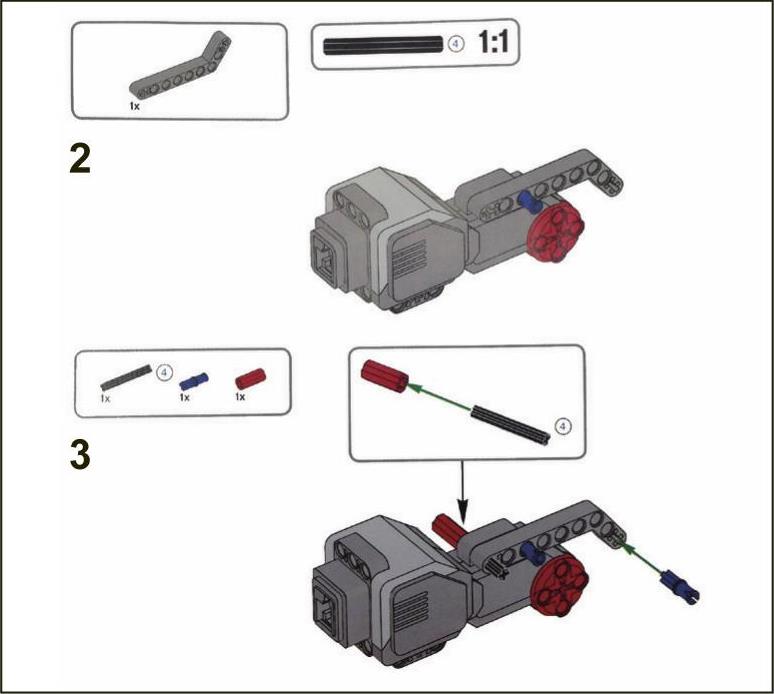
图16-5
第二步:用第一步准备的长连接销将3×7单弯梁固定在大号马达对应位置。
第三步:取1根4单位轴,与轴连接器相连接后固定住大号马达与3×7单弯梁,在3×7单弯梁十字孔处加装1个轴连接器。如图16-5所示。
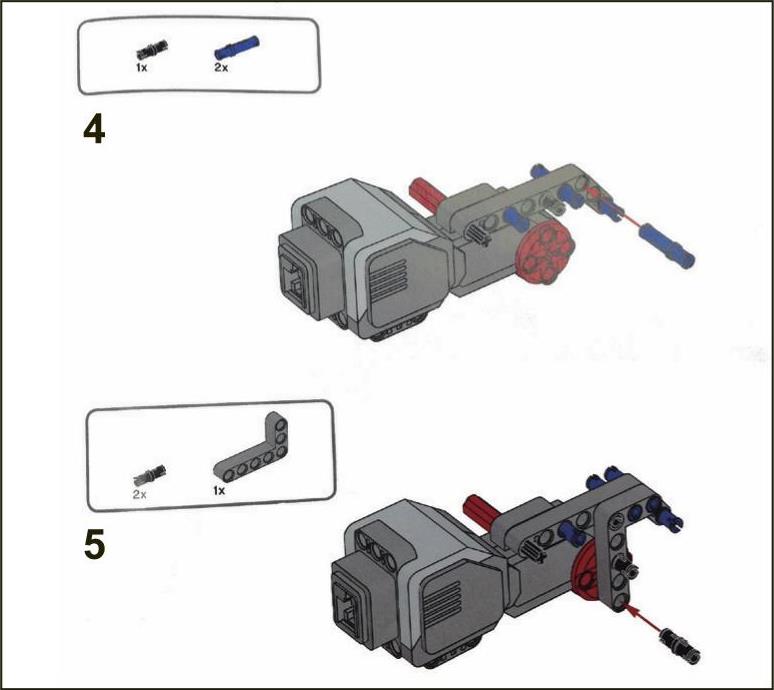
图16-6
第四步:再取2个长连接销、1个短连接销连接到3×7单弯梁相应位置。
第五步:把1根3×5直角梁3U端拼插在3×7单弯梁上,5U端相应位置加上2个短连接销。如图16-6所示。
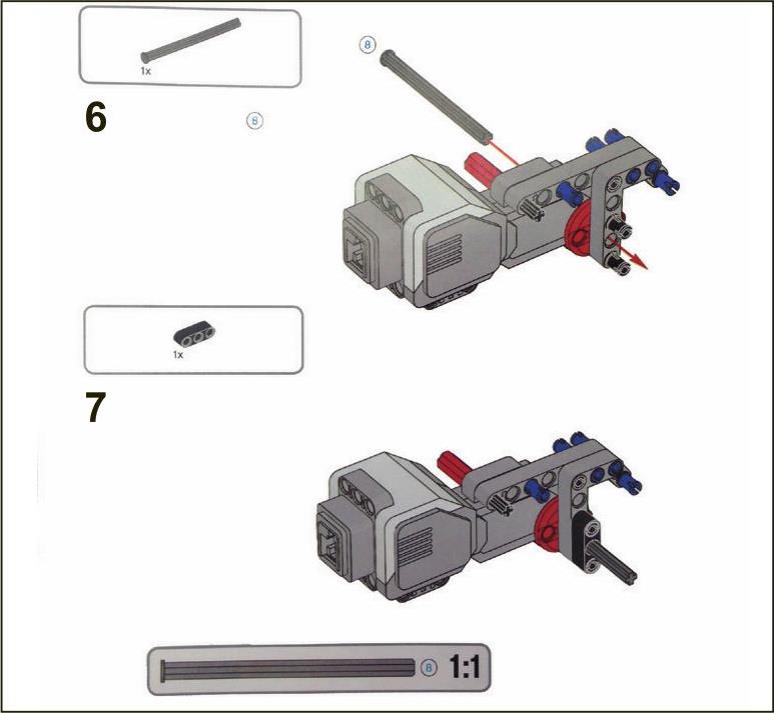
图16-7
第六步:取1根8U钉轴,从大号马达无零件侧传入马达中心十字孔,从3×5直角梁空孔传出。
第七步:取1根3U梁穿过第六步8U钉轴拼接在3×5直角梁上。如图16-7所示。
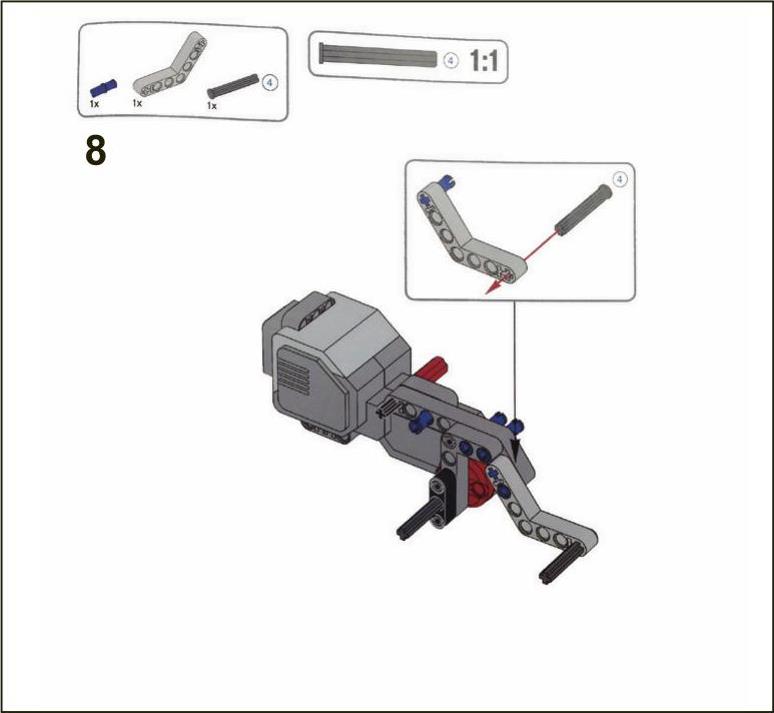
图16-8
第八步:取1根4×4单弯梁,一侧十字孔插入轴连接销,另一侧十字孔插入1根4U钉轴,如图16-8所示。
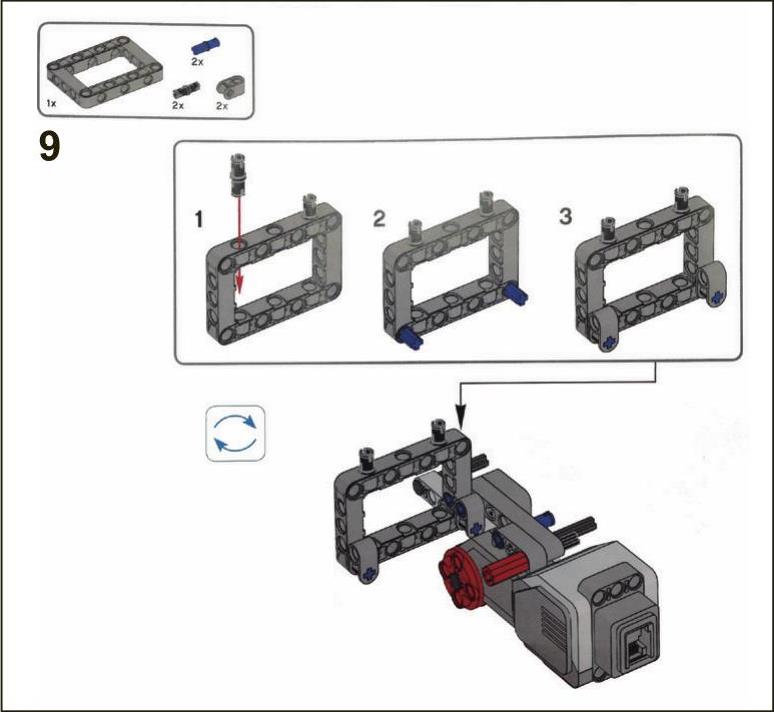
图16-9
第九步:1个5×7方框,按图16-9中位置插入2个短连接销、2个轴连接销,在两个轴连接销上插装2个十字形连接器,将十字形连接器朝向大号马达方向,连接在大号马达上的3×7单弯梁上。
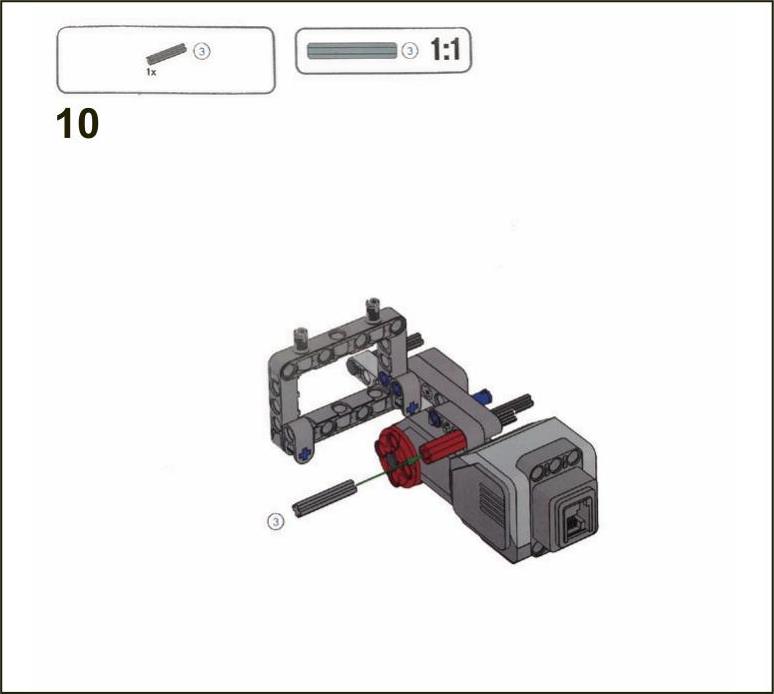
图16-10
第十步:取1根3U轴,连接在大号马达的轴连接器上,如图16-10所示。
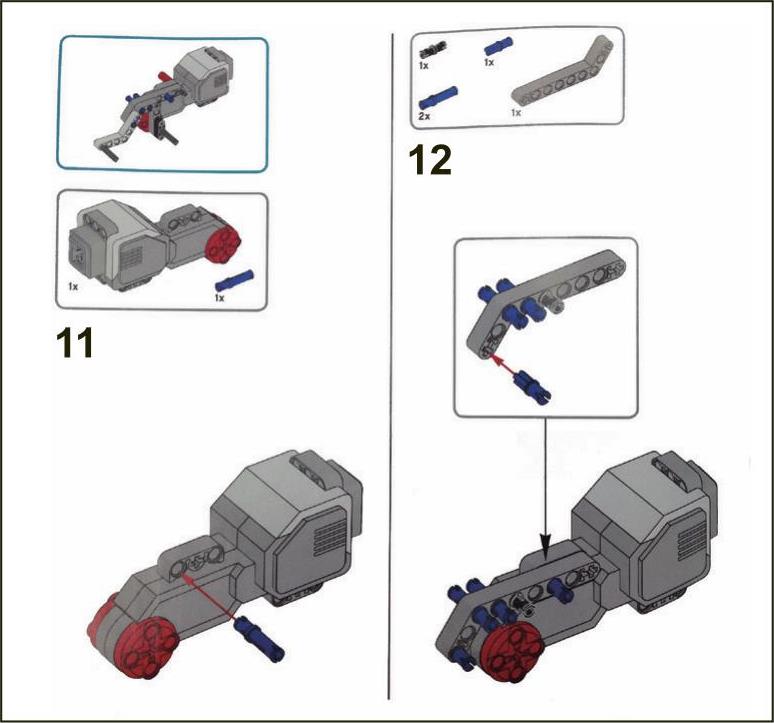
图16-11
第十一步:再准备1个大号马达和一个长连接销。
第十二步:用第十一步准备的长连接销将3×7单弯梁固定在大号马达对应位置,再取2个长连接销、1个短连接销、1个轴连接销连接到3×7单弯梁相应位置如图16-11所示。
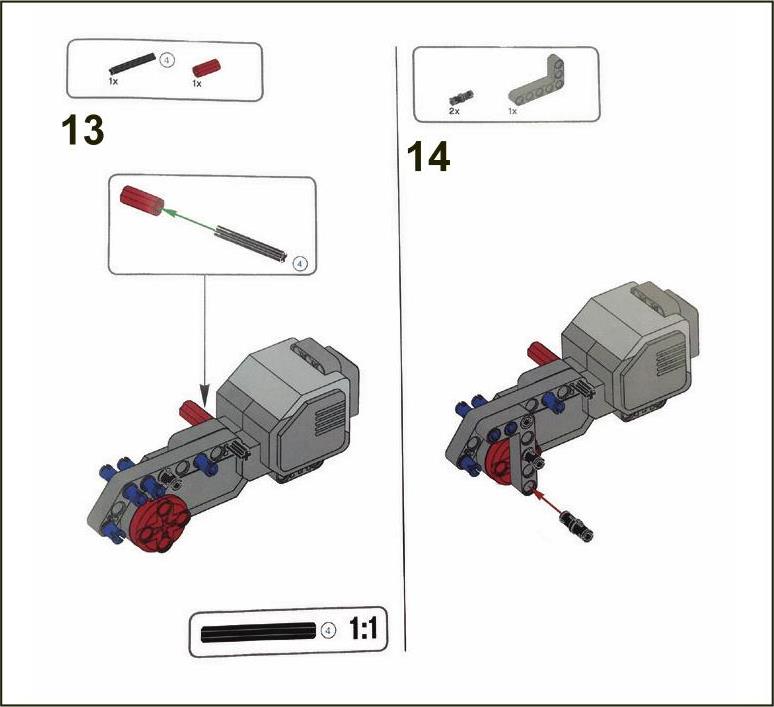
图16-12
第十三步:取1根4U轴,与轴连接器相连接后固定住大号马达与3×7单弯梁,在3×7单弯梁的十字孔处加装1个轴连接器。
第十四步:把1根3×5直角梁3U端拼插在3×7单弯梁上,5U端相应位置加上2个短连接销。如图16-12所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图16-13
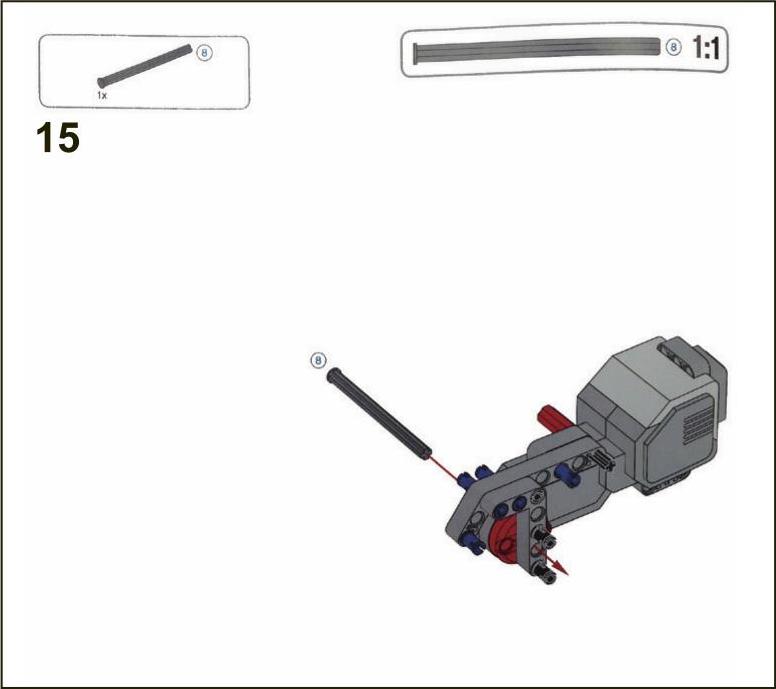
第十五步:取1根8U钉轴,从大号马达无零件侧传入马达中心十字孔,从3×5直角梁空孔传出,如图16-13所示。
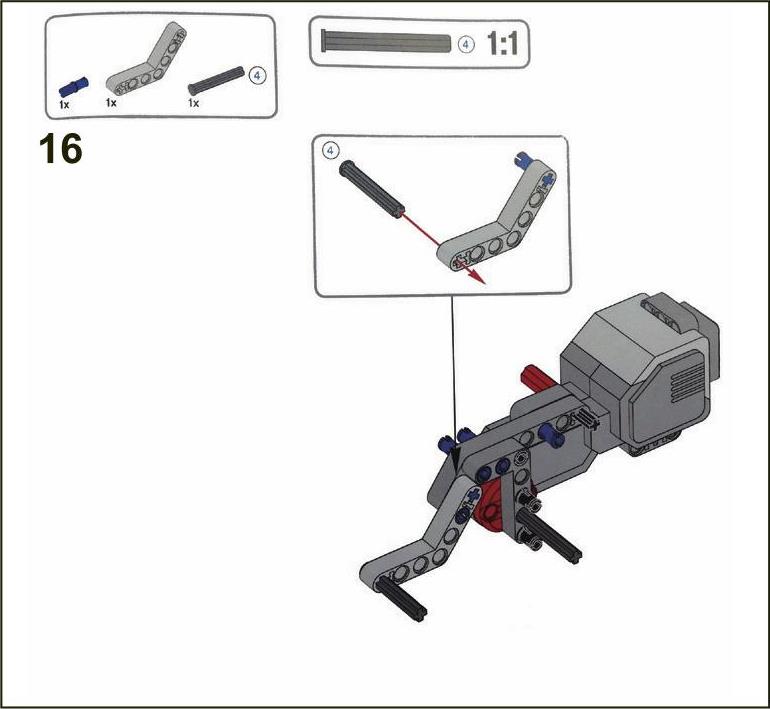
图16-14
第十六步:取1根4×4单弯梁,一侧十字孔插入轴连接销,另一侧十字孔插入1根4U钉轴,如图16-14所示。
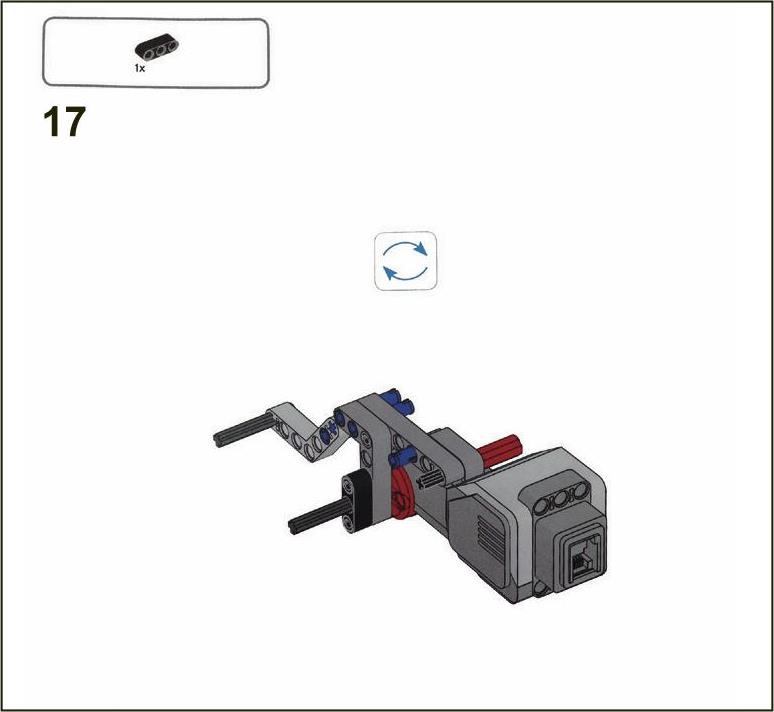
图16-15
第十七步:取1根3U梁穿过第六步8U钉轴拼接在3×5直角梁上,如图16-15所示。
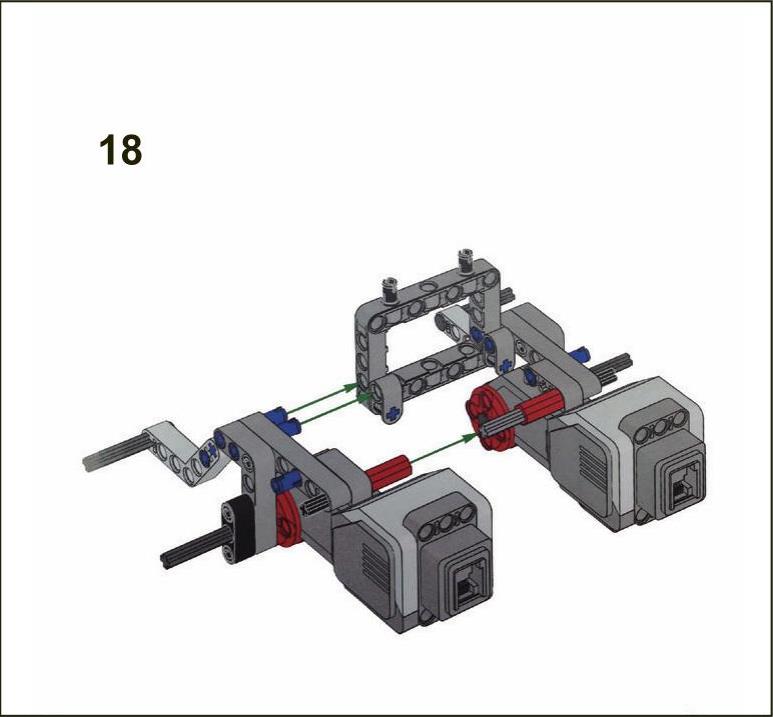
图16-16
第十八步:将已完成的两部分拼接在一起,如图16-16所示。
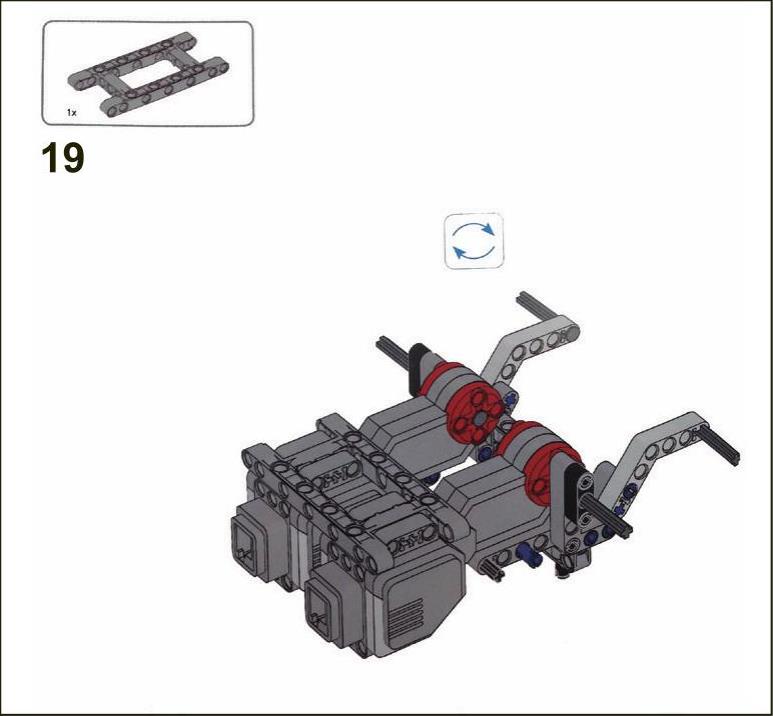
图16-17
第十九步:将已完成部分底部向上,取1个5×11方框架在两个大号马达突出的部分固定,如图16-17所示。
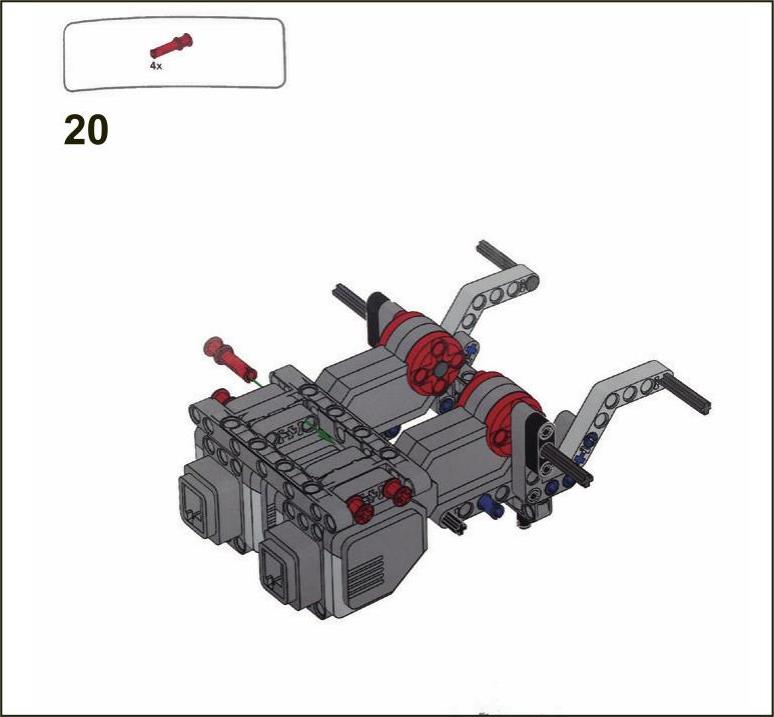
图16-1
第二十步:用4个有轴套的连接销固定,如图16-18所示。
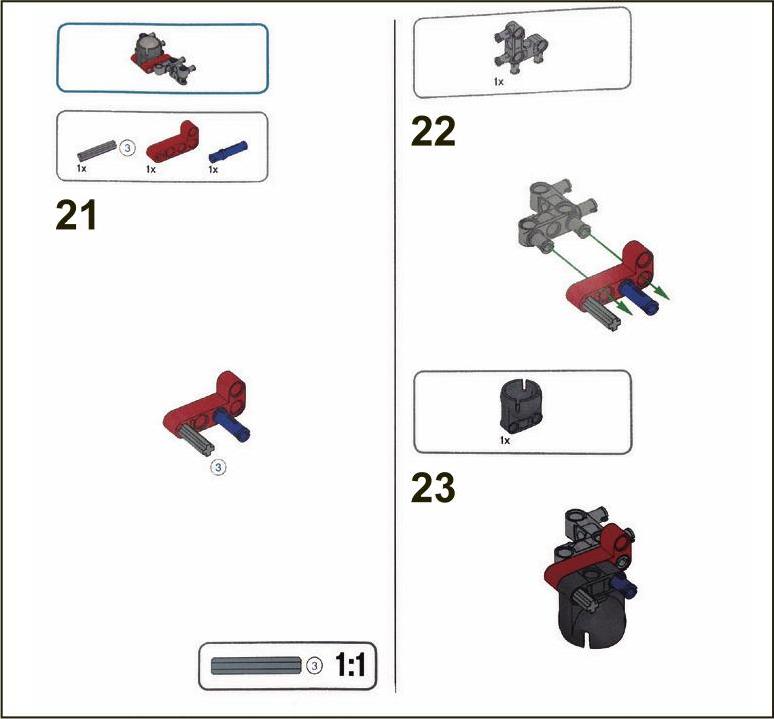
图16-19
第二十一步:取1根2×4直角梁,在相应位置上拼插1根3U轴、1个长连接销。
第二十二步:将一个灰色直角连接器插入2×4直角梁空孔中。
第二十三步:将万向轮拼接在3U轴和长连接销上。如图16-19所示。
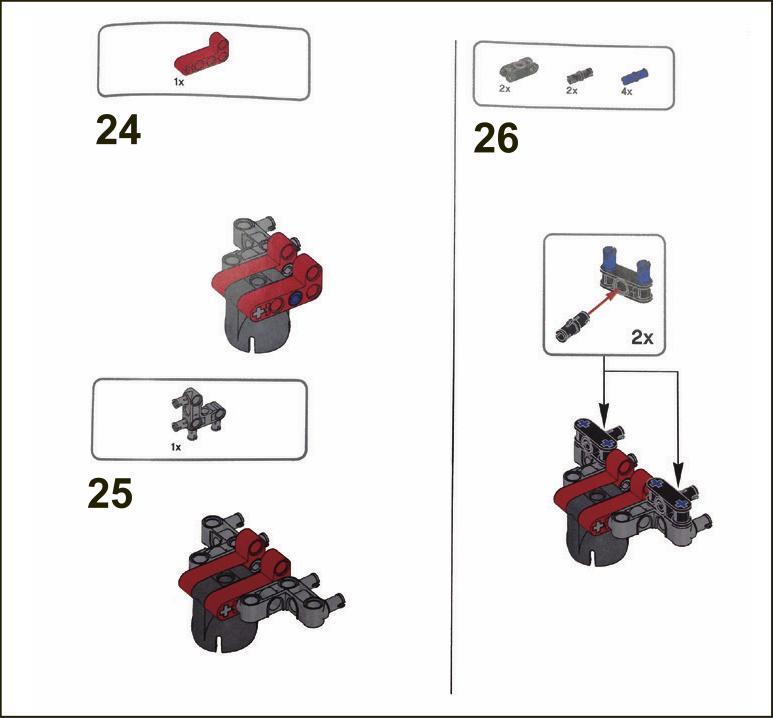
图16-20
第二十四步:用另一个2×4直角梁固定万向轮。
第二十五步:在这个2×4直角梁上拼插一个灰色直角连接销。
第二十六步:取2个双十字形连接器,十字孔插入各2个轴连接器,圆孔各插入2个短连接销,使露出的短连接销向后,将双十字形连接器连接在灰色直角连接销上。如图16-20所示。
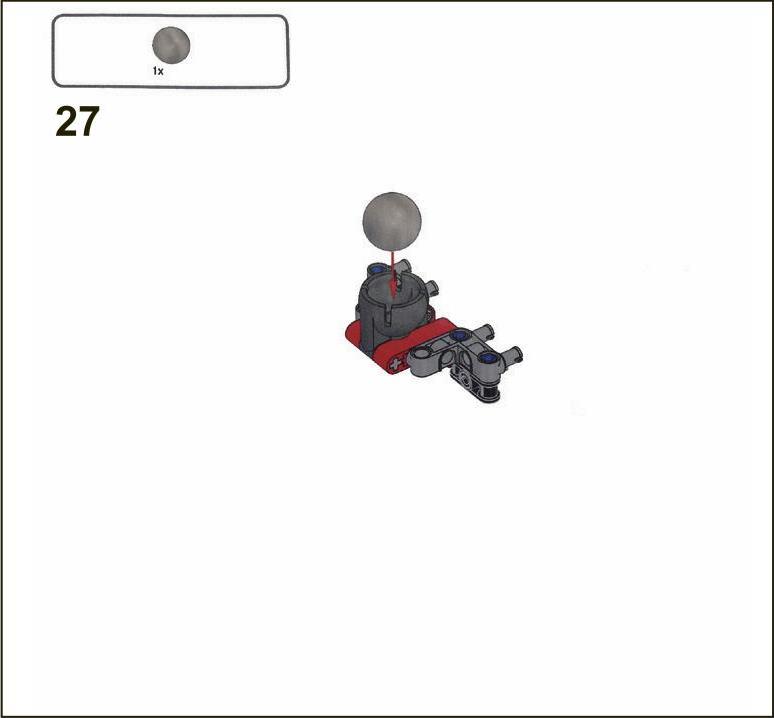
图16-21
第二十七步:将万向轮金属球装入相应位置,如图16-21所示。
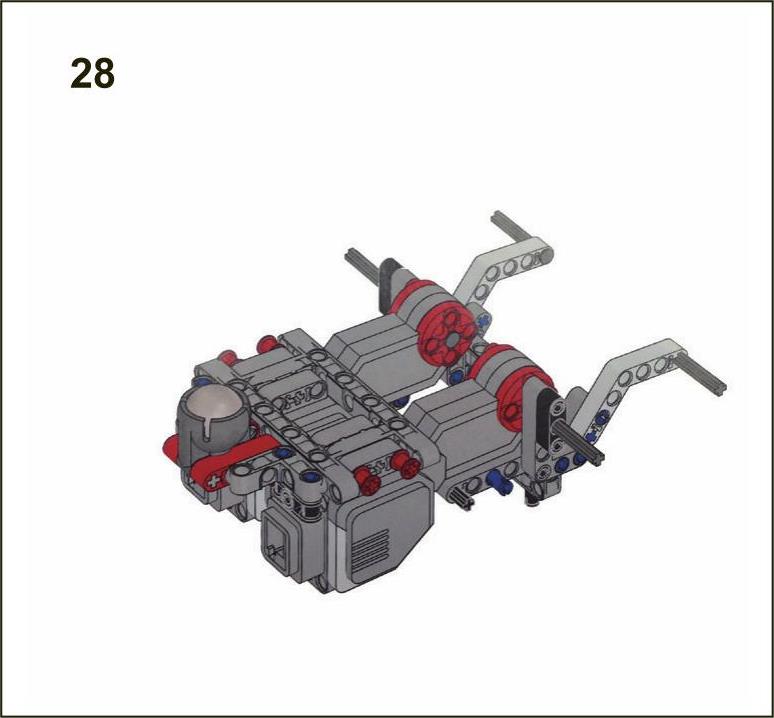
图16-22
第二十八步:将第二十七步成品唯一裸露的短连接销拼插在马达相应位置上,如图16-22所示。
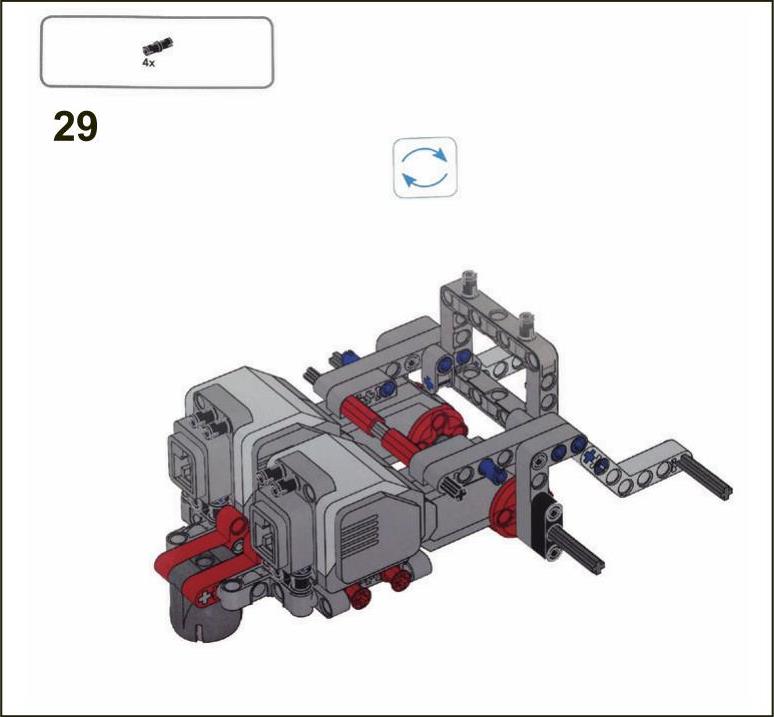
图16-23
第二十九步:将已完成部分反转,在大号马达后部加入4个短连接销,如图16-23所示。
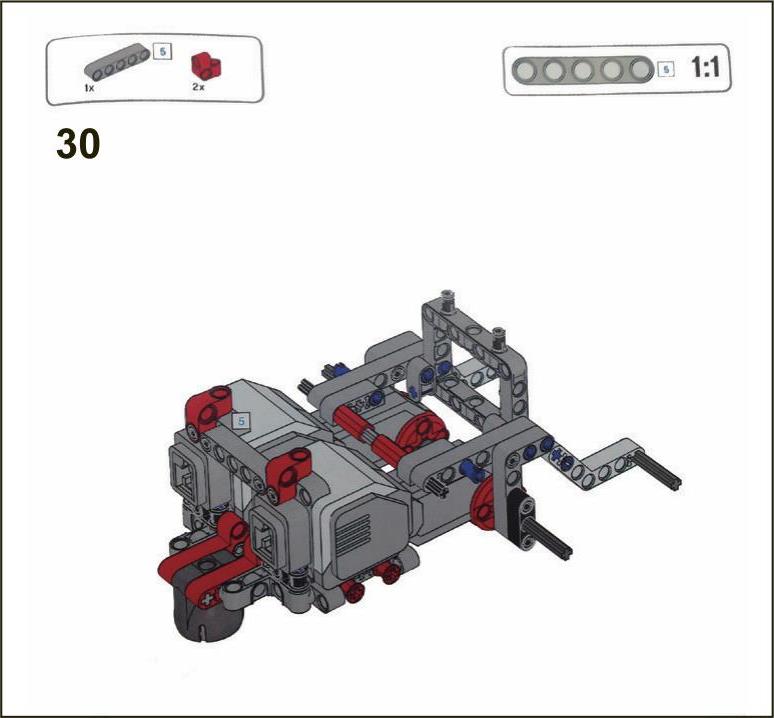
图16-24
第三十步:在第二十九步的短连接销上固定1根5U梁和2个3U双交叉块,如图16-24所示。
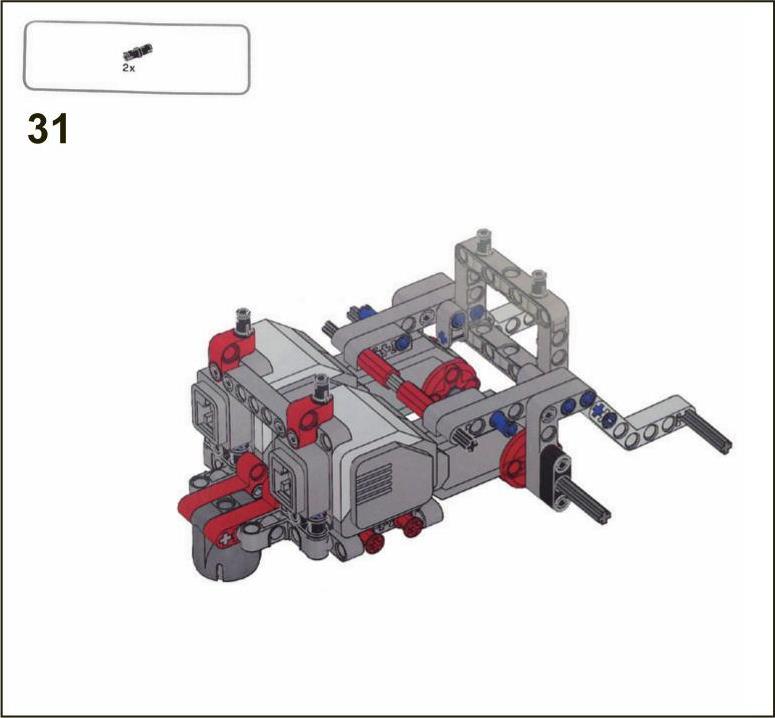
图16-25
第三十一步:在3U双交叉块上一边拼接1个短连接销,如图16-25所示。
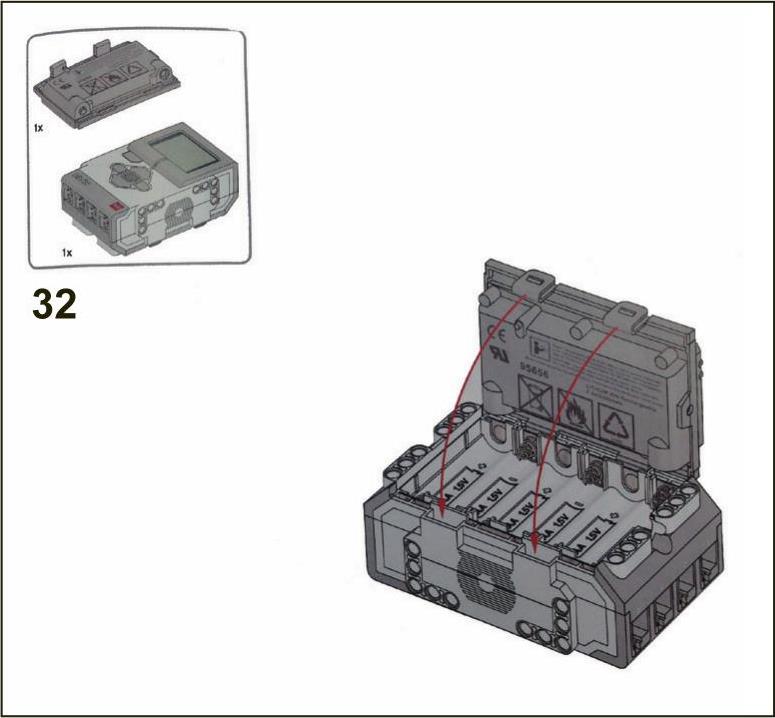
图16-26
第三十二步:将EV3控制器电池插入控制器,如图16-26所示。
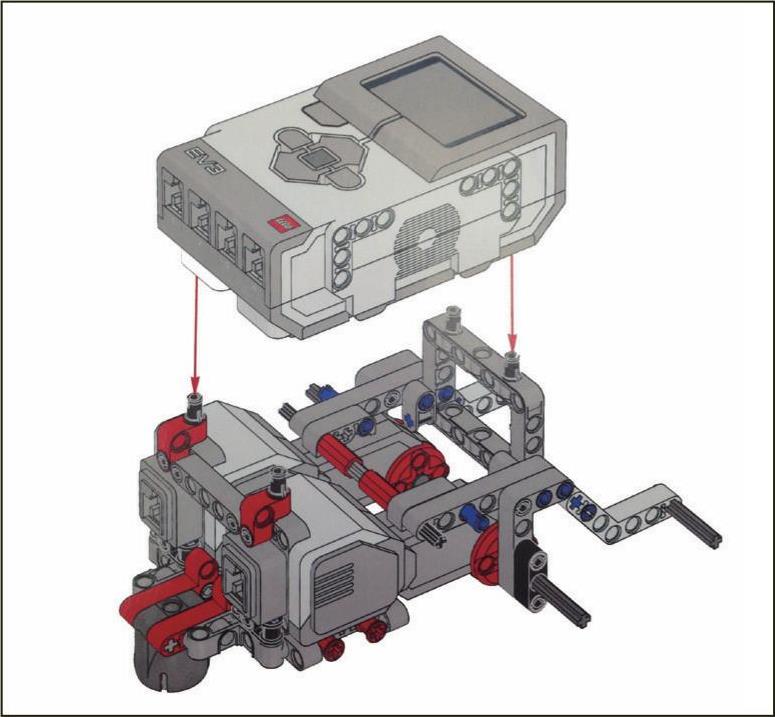
图16-27
将EV3控制器固定在剩下的短连接销上,如图16-27所示。
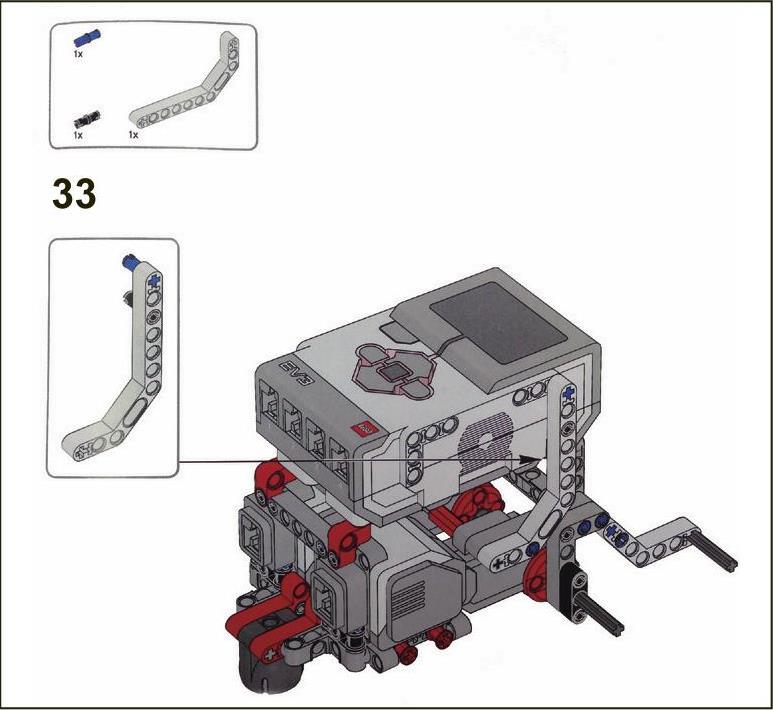
图16-28
第三十三步:取1根3×7直度梁、短连接销、轴连接销,固定EV3控制器与车体,如图16-28所示。

图16-29
第三十四步:轮毂与轮胎连接好,安装在突出的8U钉轴上,如图16-29所示。

图16-30
第三十五步:用牙型连接器固定车轮,如图16-30所示。
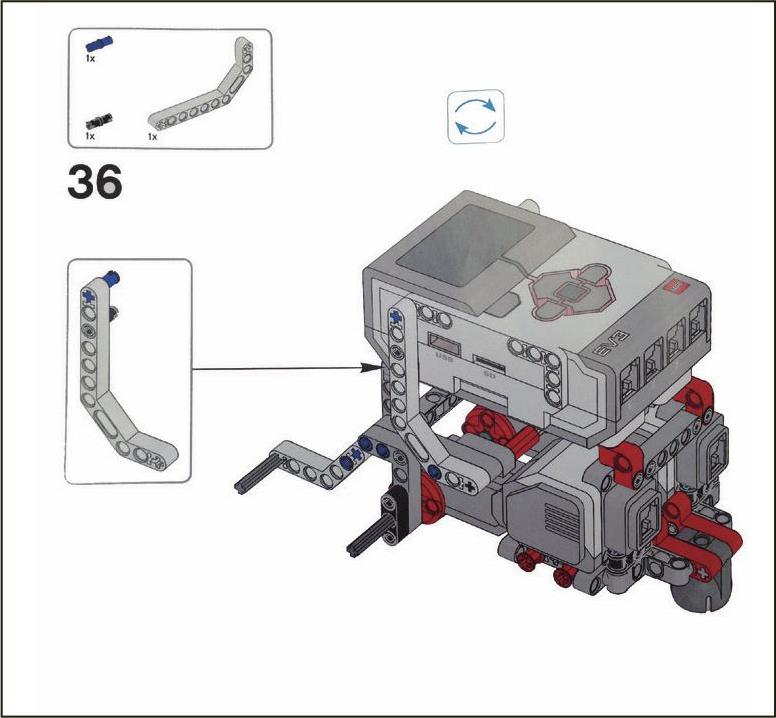
图16-31
第三十六步:再取1根3×7直度梁、短连接销、轴连接销,固定EV3控制器与车体另一侧,如图16-31所示。
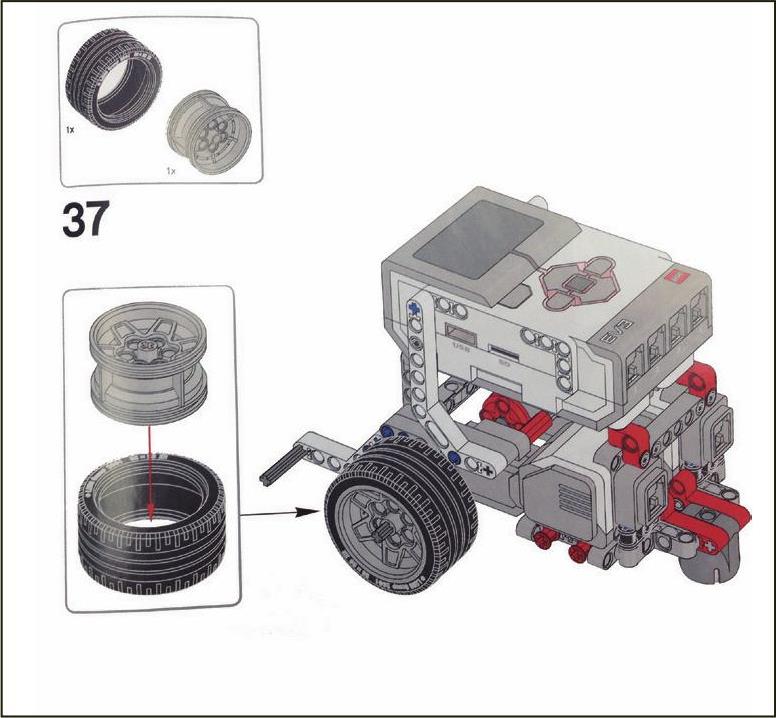
图16-32
第三十七步:轮毂与轮胎连接好,安装在另一侧突出的8U钉轴上,如图16-32所示。
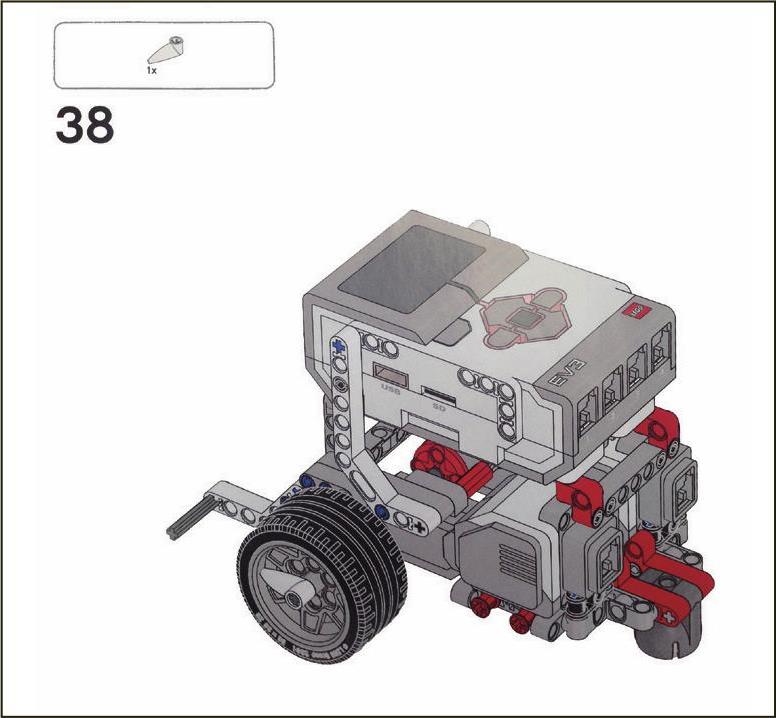
图16-33
第三十八步:用牙型连接器固定车轮,小车完成,如图16-33所示。
回顾
开动脑筋,解决以下问题,完成本课任务:
(1)你知道如何搭建才能使小车跑得更快吗?
(2)你知道几种控制马达实现小车左转或右转的方法?
拓展
联想生活中所见到过的各种功能的智能车,结合本课知识及自己动手制作的小车,你可以搭建能够自己设定功能的小车吗?
[1]1oz=28.35g。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。