



工厂是生产各种生活用品的地方,但是有些冶金、电子、原子能等相关行业,由于其有害作业或劳动强度大等原因,工人直接操作非常困难,而机械手能模仿人手臂的某些动作和功能,按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。机械手的样子有很多种,今天我们也来做一个吧!
知识
一、认识机械手
1.机械手
1958年美国联合控制公司研制出了第一台机械手。这是人类机械史上第一次发明机械手,同时也是人类在机械领域的一个新的突破。
现今的生活,在科技日新月异的进展之下,机械人手臂与人类的手臂最大的区别就在于灵活度与耐力度。 机械手主要由手部、运动机构和控制系统三大部分组成。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手,也常称为机械手。机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
2.各式各样的机械手(图15-1)

图15-1 各式各样的机械手
二、LEGO EV3材料介绍
1.认识器件——蜗轮
在机器人套装中,你会发现另外一种奇怪的黑色类似带有螺旋线的圆柱体,它就是蜗轮(图15-2)。蜗轮通常会与齿轮进行啮合,并且会连接两个互相垂直的轴,也就是说通过蜗轮的传动可以改变力的方向,而且蜗轮可以增大扭矩,减小角速度,并且可以使被传动的齿轮具备自锁的功能。

图15-2 蜗轮
蜗轮与常用的24齿的齿轮啮合,通过搭建如图15-3所示这个简单的装置,可以发现蜗轮的很多特点。用手试着去转动齿轮,你能轻易地转动与蜗轮相连接的轴,但不能转动与24齿相连接的轴。蜗轮能产生单向传动系统,这是它的重要属性。你能用蜗轮带动其他齿轮,但不能被其他齿轮带动,产生这个现象的原因是摩擦力。通过观察我们发现两根轴是正交的,使用蜗轮时,传动方向必然会改变。
之前我们已经知道如何计算普通齿轮的传动比。你是否想知道蜗轮所产生的传动比呢?先做一个实验:搭建图15-3中的装置,缓慢转动蜗轮轴一圈,
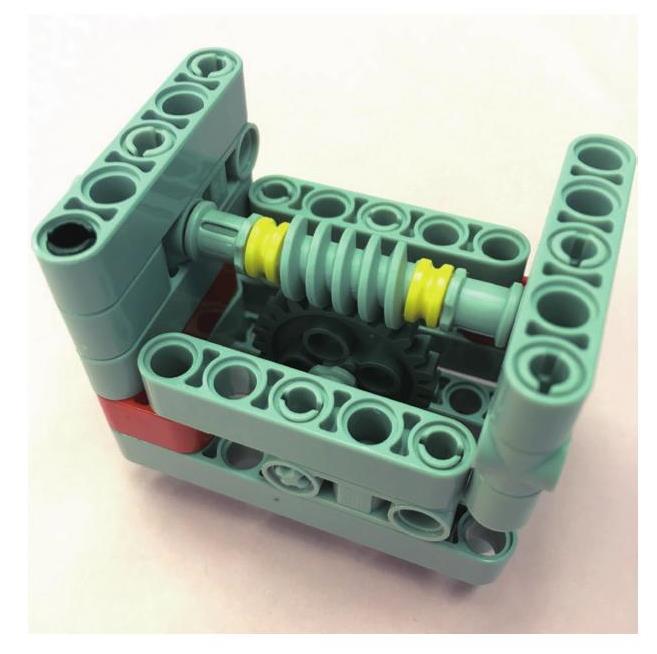
图15-3 蜗轮装置
同时观察24齿齿轮。可以观察到蜗轮每转过一圈,24齿的齿轮刚好转过一个齿,我们得到一个结论:蜗轮是1齿齿轮,我们在装置中使用了一级传动就得到了24∶1的传动比。使用40齿的齿轮可以将传动比提高到40∶1。
蜗轮装置主要应用在减速和增加扭矩,希望带有负载的装置准确、稳定地定位时,或是想获得一个很高的减速传动比,蜗轮会非常有用。这个特殊的装置的摩擦力极大以致无法被其他齿轮带动。同样,这么大的摩擦力也会使它的效率大大降低,因为在这过程中会损耗许多扭矩。在某些情况下,我们非常需要这种不对称的装置。例如,我们设计的机器人用手臂提起物体。使用标准齿轮产生25∶1的传动比,当手臂提起物体并停止时会发生什么情况呢?这个对称装置把物体的重量(势能)转变成扭矩,扭矩转变成角速度,马达就自行回转使得手臂回落下来。在类似这种情况中,就可以使用蜗轮来解决这一问题。蜗轮的自锁功能使马达不能回转。
小知识
所谓蜗轮的自锁功能是指:只有蜗轮这个轴是可以人为旋转的,而齿轮的轴是不能被人为旋转的,齿轮只能依靠蜗轮的传动而转动。
2.蜗轮蜗杆的特点
1)可以得到很大的传动比,比交错轴斜齿轮机构紧凑。
2)两轮啮合齿面间为线接触,其承载能力大大高于交错轴斜齿轮机构。
3)蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪声很小。
4)具有自锁性。当蜗杆的导程角小于啮合轮齿间的当量摩擦角时,机构具有自锁性,可实现反向自锁,即只能由蜗杆带动蜗轮,而不能由蜗轮带动蜗杆。如在起重机械中使用的自锁蜗杆机构,其反向自锁性可起安全保护作用。
5)传动效率较低,磨损较严重。蜗轮蜗杆啮合传动时,啮合轮齿间的相对滑动速度大,故摩擦损耗大、效率低。
6)蜗杆轴向力较大。
实践
1.任务要求:制作蜗轮机械手模型,具体要求如下
(1)坚固、稳定。
(2)美观、操作简单。
(3)能抓住轻小物体。
2.准备器件(图15-4)
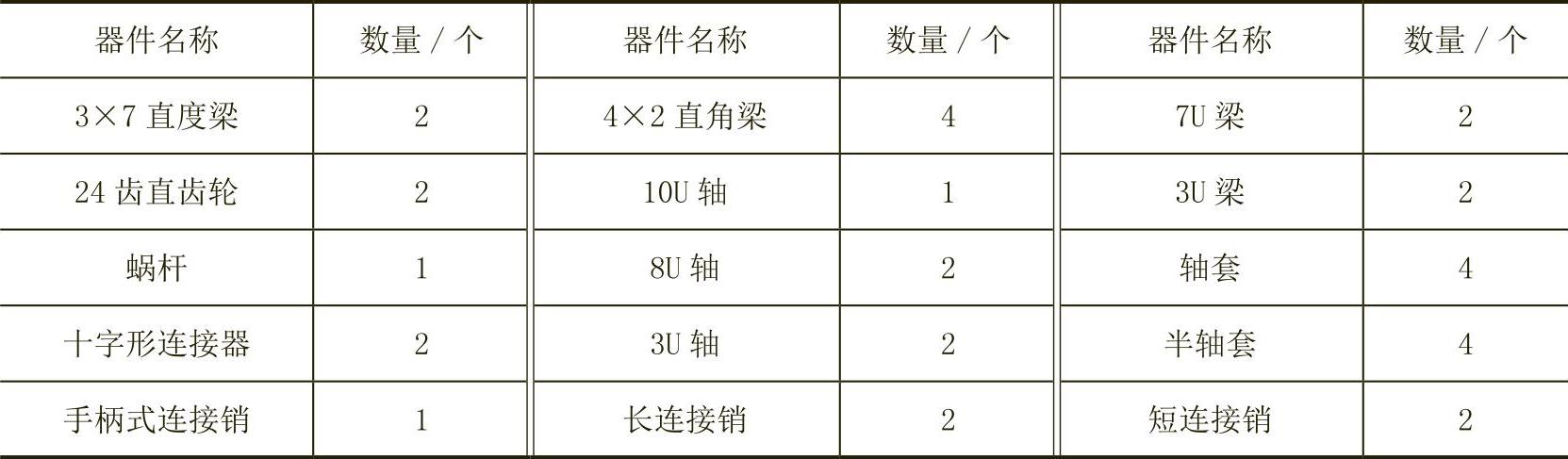
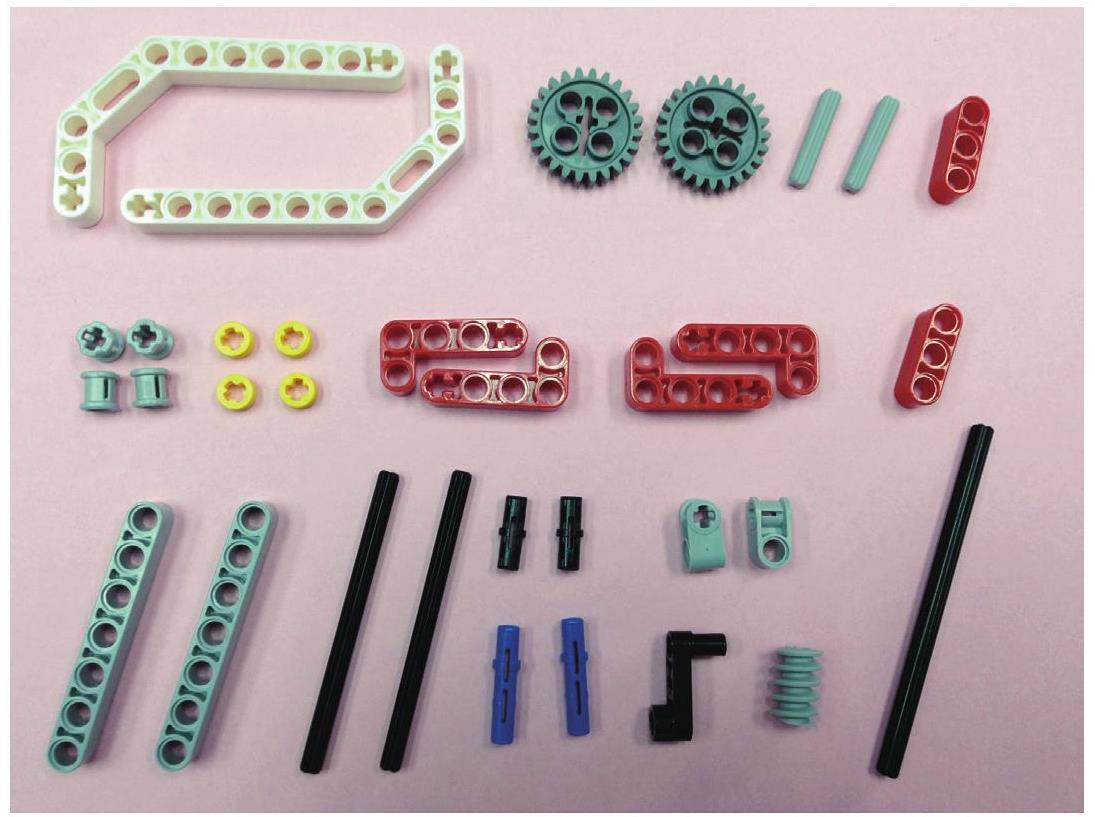
图15-4 蜗轮机械手零件图
3.动手搭建
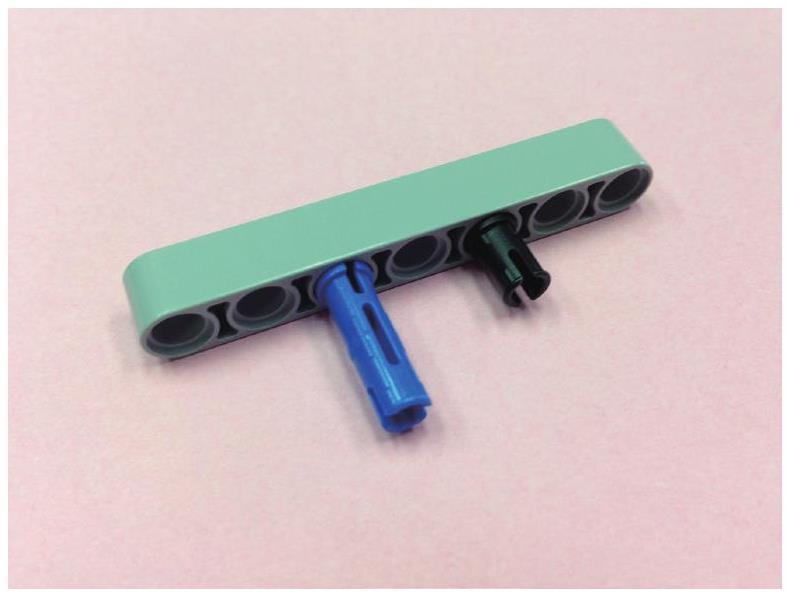
图15-5
第一步:完成机械手一侧,取1根7孔梁,在第3、5孔上分别加装1个长连接销和1个短连接销,如图15-5所示。(https://www.xing528.com)
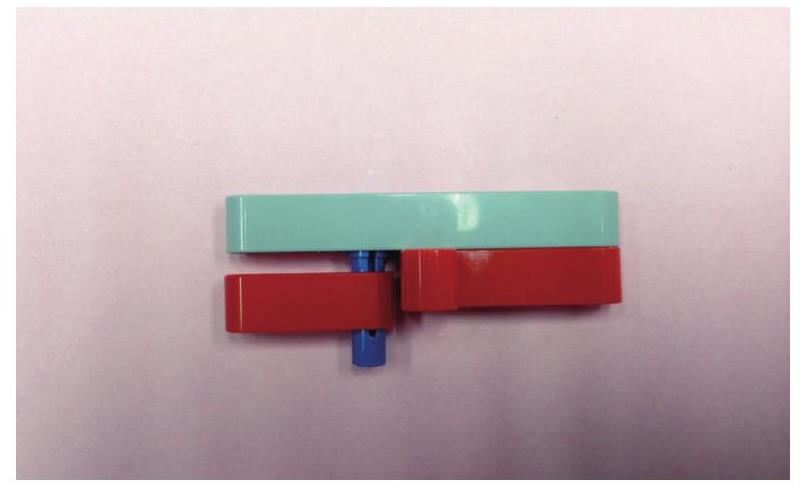
图15-6
第二步:取1根3U梁与长连接销相连接,1根4×2直角梁与短连接销相连,如图15-6所示。
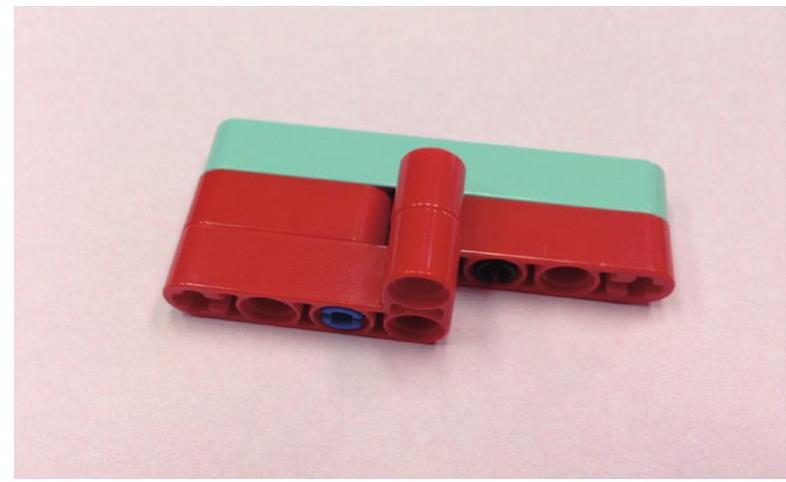
图15-7
第三步:再取1根4×2直角梁,通过长连接销连接在3U梁外侧,2孔端与第二步2孔端对齐,不要相连,如图15-7所示。
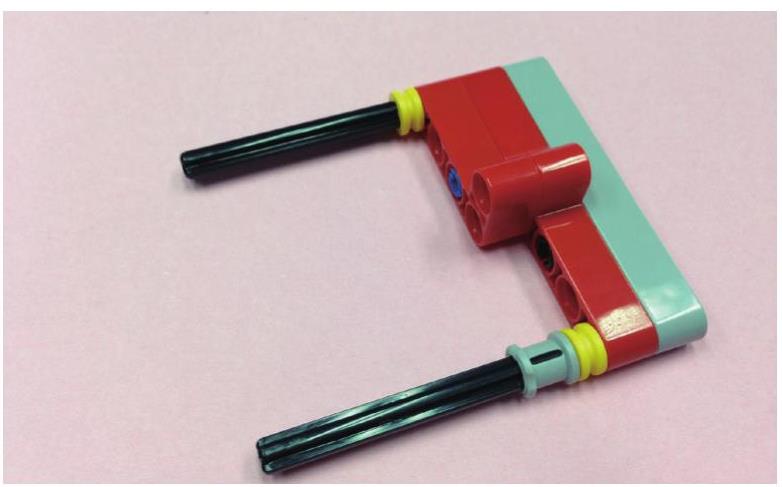
图15-8
第四步:取2根8U轴,通过第三步4×2直角梁4孔端的十字孔,并用半轴套固定,轴套补齐所差的一个单位,如图15-8所示。
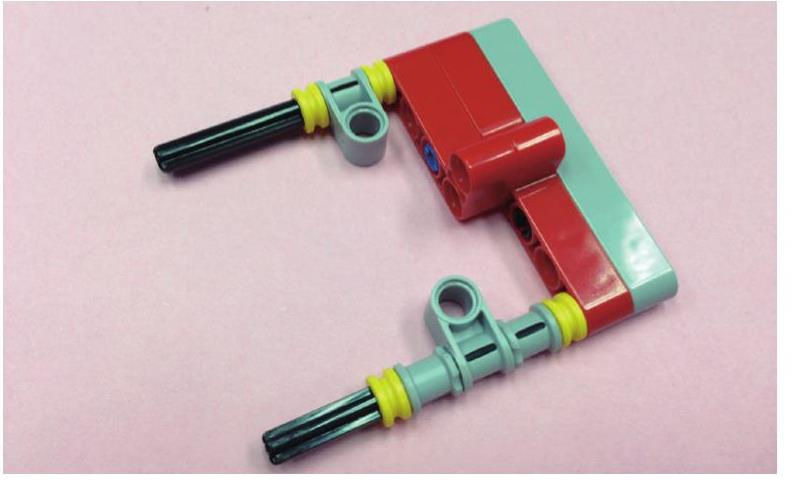
图15-9
第五步:将2个十字形连接器十字孔连接在8U轴上,使十字形连接器圆孔相对,用轴套补齐所差的一个单位,半轴套固定,如图15-9所示。
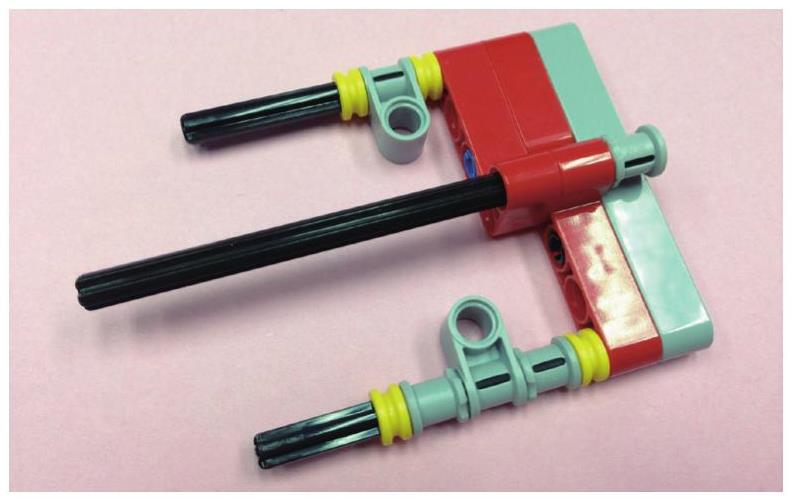
图15-10
第六步:取1根10U轴,将其穿过第三步相重叠的2根4×2直角梁2孔端的上孔中,外侧加轴套固定,如图15-10所示。
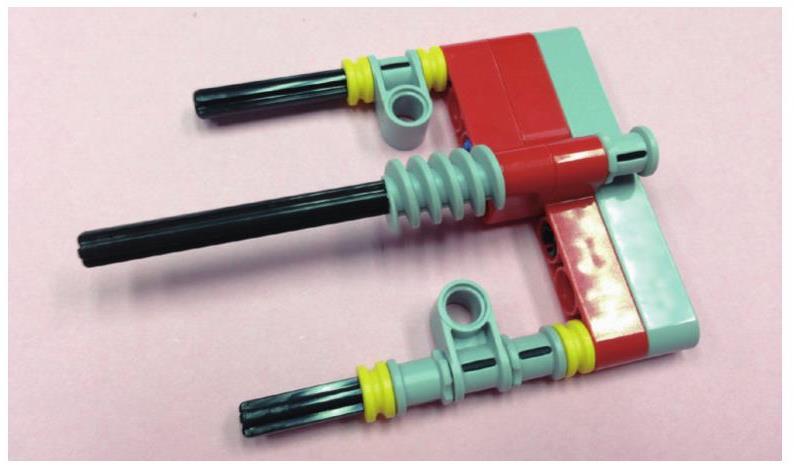
图15-11
第七步:取蜗杆,将其连接在10U轴内侧,如图15-11所示。
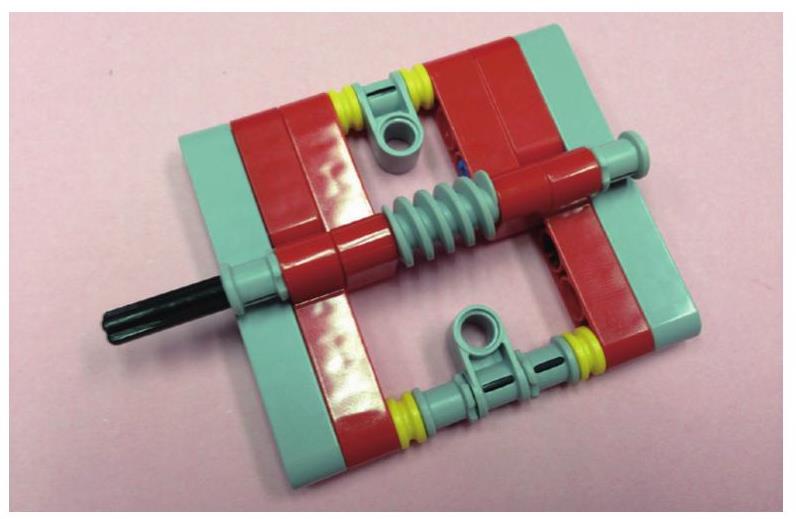
图15-12
第八步:对照第一~三步对称完成机械手另一侧,并与10U轴相连,用轴套固定,如图15-12所示。
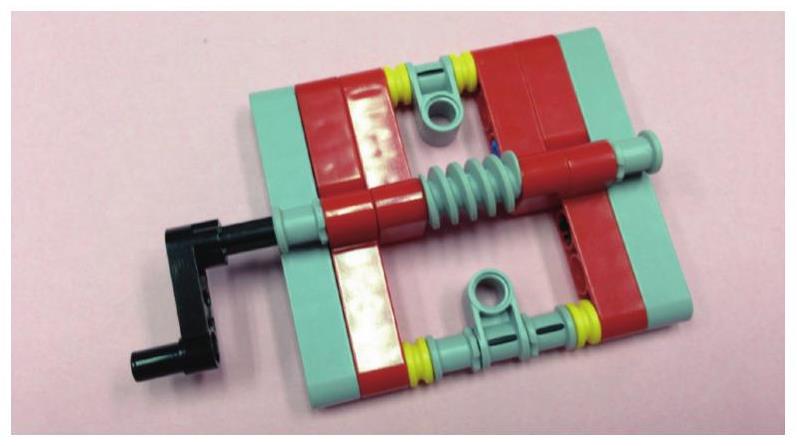
图15-13
第九步:加装手柄,在多出来的这根轴上加装手柄式连接销,完成手柄,如图15-13所示。
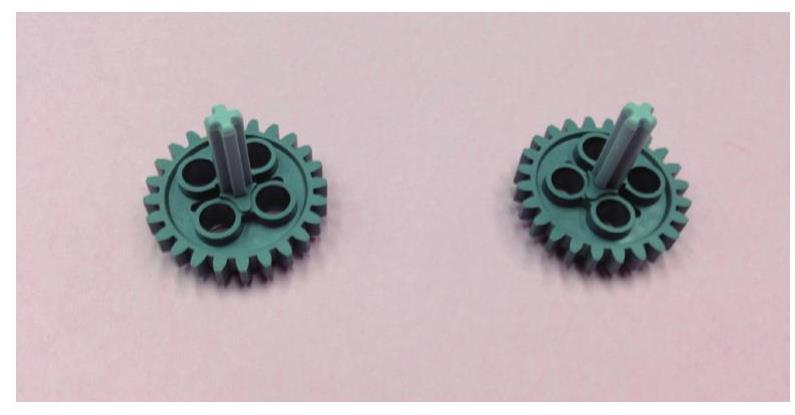
图15-14
第十步:取2根3U轴,穿过24齿直齿轮中心十字孔,如图15-14所示。
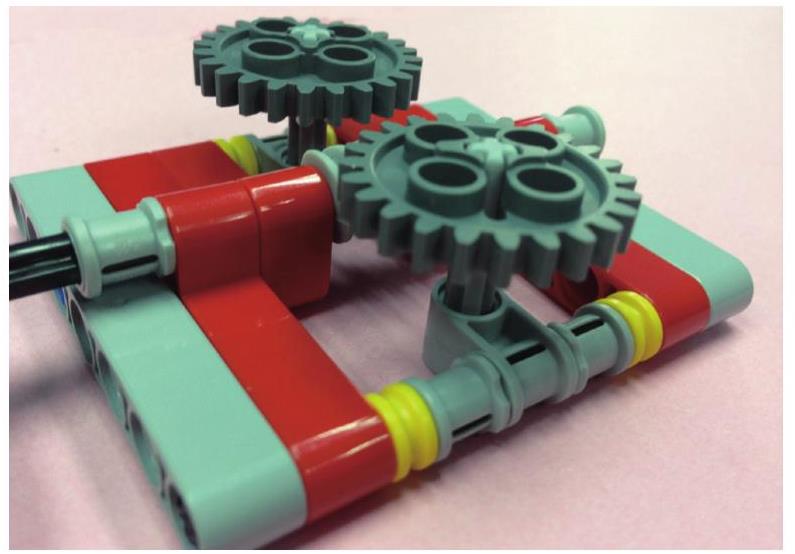
图15-15
第十一步:将带24齿直齿轮的3U轴穿过十字形连接器圆孔,使齿轮与蜗杆咬合,如图15-15所示。
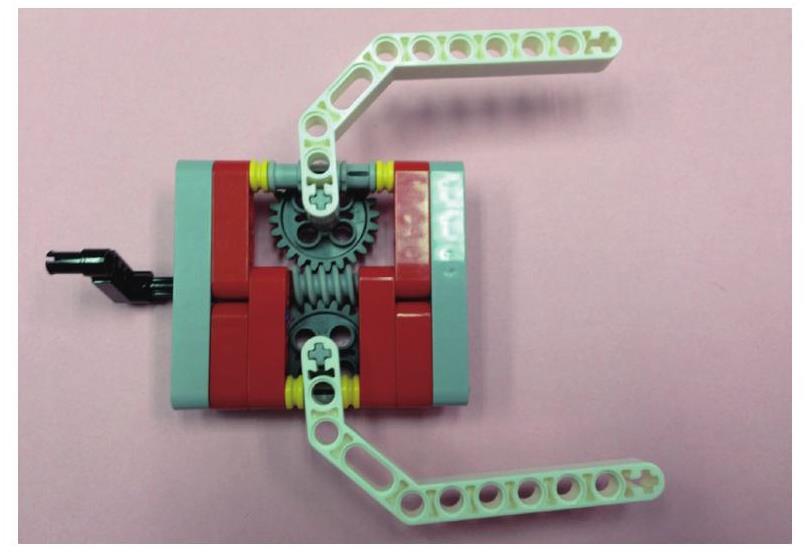
图15-16
第十二步:取3×7直度梁,3孔侧十字孔与齿轮背面多出的轴相连接,如图15-16所示。
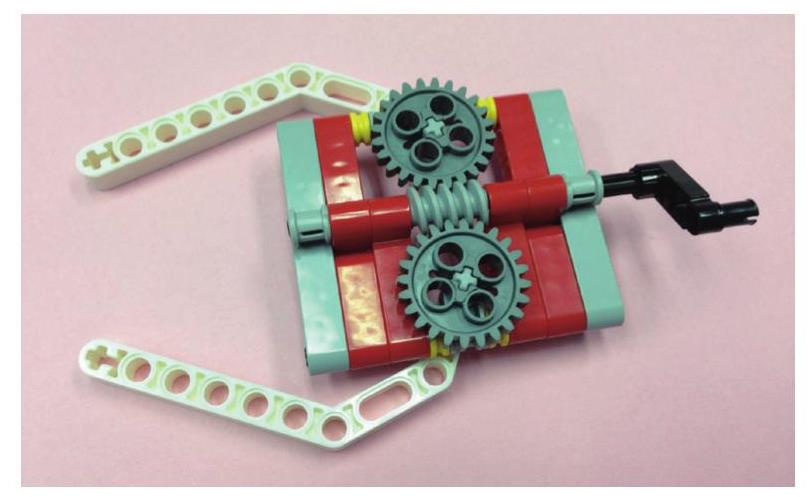
图15-17
第十三步:将齿轮向上,完成蜗轮机械手,如图15-17所示。
回顾
开动脑筋,解决以下问题,完成本课任务:
(1)本课搭建机械手中使用了什么特殊的器件?
(2)蜗轮在功能上有什么作用?它是如何用它来操作机械手的?
拓展
通过本课对蜗轮的认识有了简单了解,了解了其与齿轮的配合。机械手的模样多种多样,你能否使用蜗轮结构制作出其他样子的机械手?动手试一试。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。