



机器人可以帮助人类做很多事情,生活中的一些事情也可以用机器人来解决,机器人帮助我们做事情需要有手,我们称之为机械手。机械手能模仿人手和手臂的某些动作功能,是按固定程序抓取、搬运物件或操作工具的自动操作装置。
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
知识
一、各式各样的机械手(图7-1)
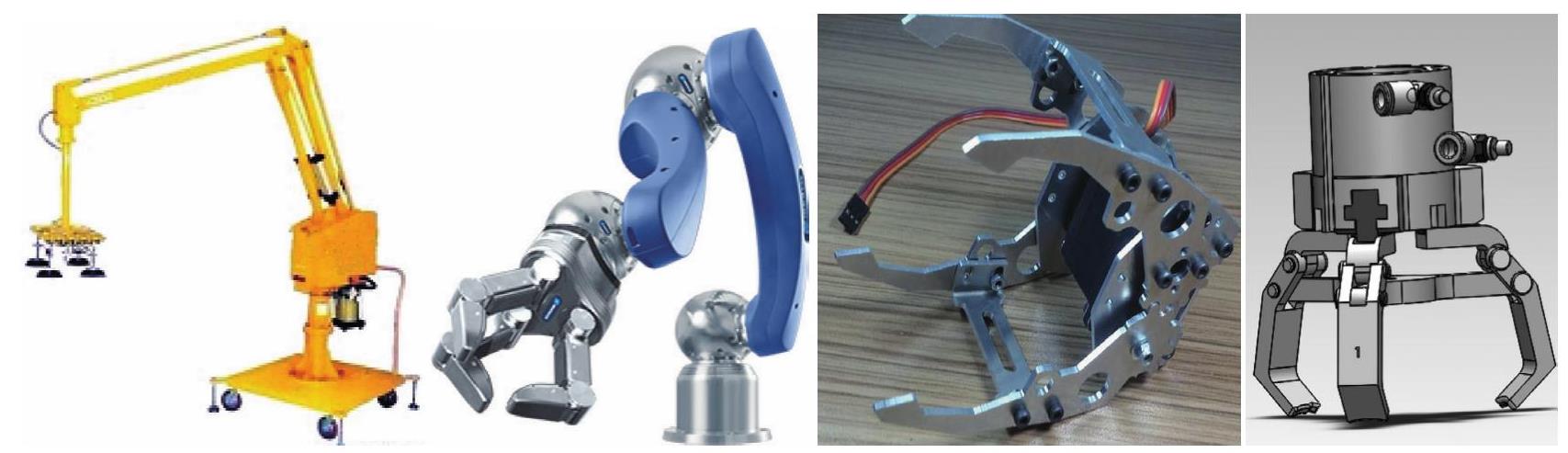
图7-1 各式各样的机械手
二、连杆机构
机器人的动力主要来自于电机,电机的运动是圆周运动,很多时候机器人要做上下或左右的往复运动,这时我们就要利用连杆机构,它可以实现把圆周运动转变为上下或左右的往复运动,从而实现机械手的张合功能(图7-2)。
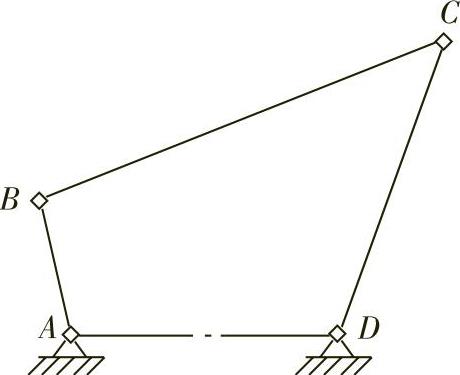
图7-2 曲柄摇杆机构
图7-2为曲柄摇杆机构,A和D是不动的固定构件,叫作机架,与固定点相连的AB和CD构件叫连架杆。AB连接杆做圆周运动,也称为曲柄。CD连杆会被带动做往复运动,称为摇杆。连接曲柄和摇杆的BC称为连杆,此连杆机构被称为曲柄摇杆机构(图7-3)。

图7-3 曲柄摇杆机构实物图
小知识
在曲柄摇杆机构中,曲柄是最短的构件,最短构件与最长构件之和要小于或等于其他两个构件之和。
实践
1.任务要求:制作一个“机械手”模型
(1)主体结构坚固、稳定。
(2)模型设计合理、美观。
2.准备材料(图7-4)
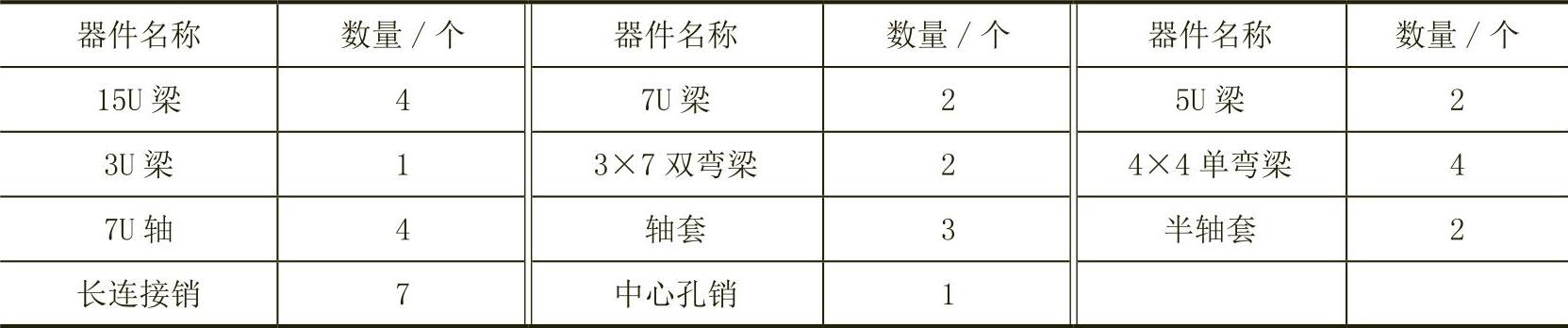
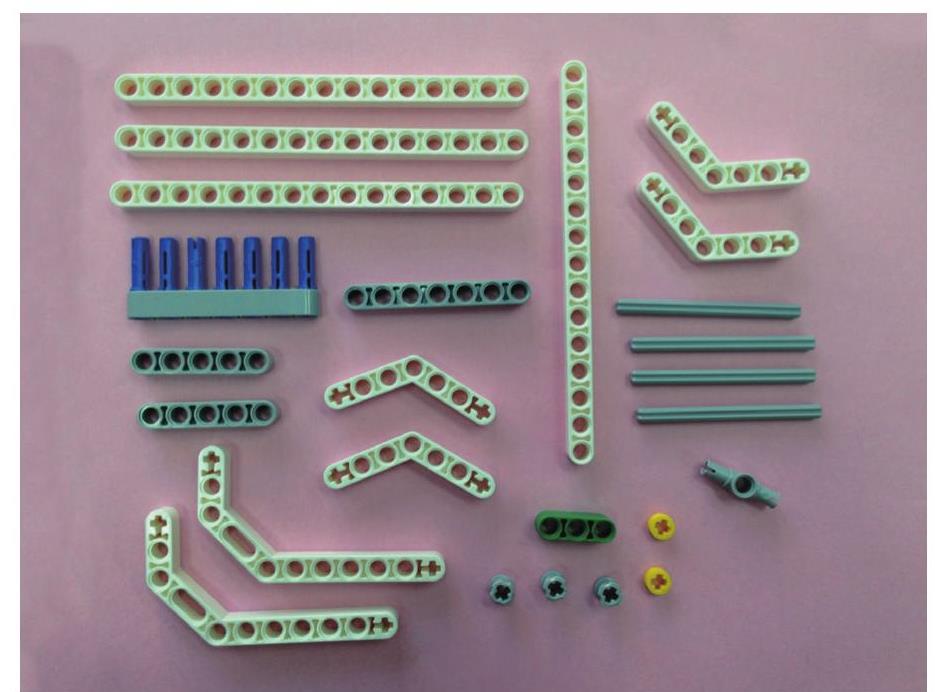
图7-4 机械手零件图
3.动手搭建

图7-5
第一步:取5U梁1根,4×4单弯梁2根,用长连接销连接,如图7-5所示。
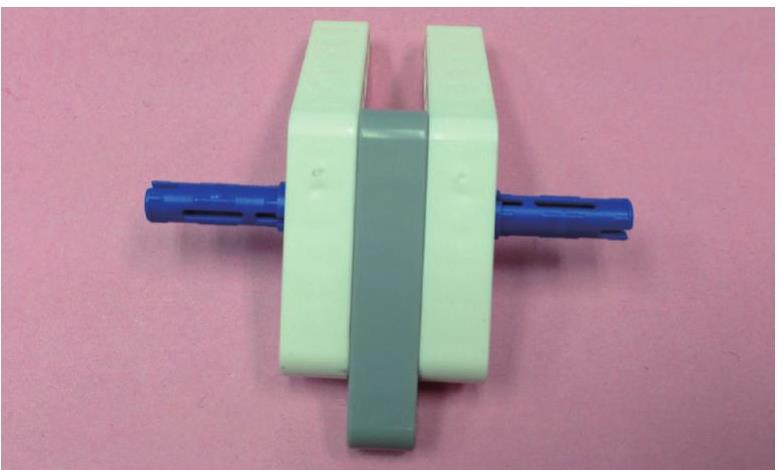
图7-6
第二步:取长连接销2根与4×4单弯梁连接,如图7-6所示。
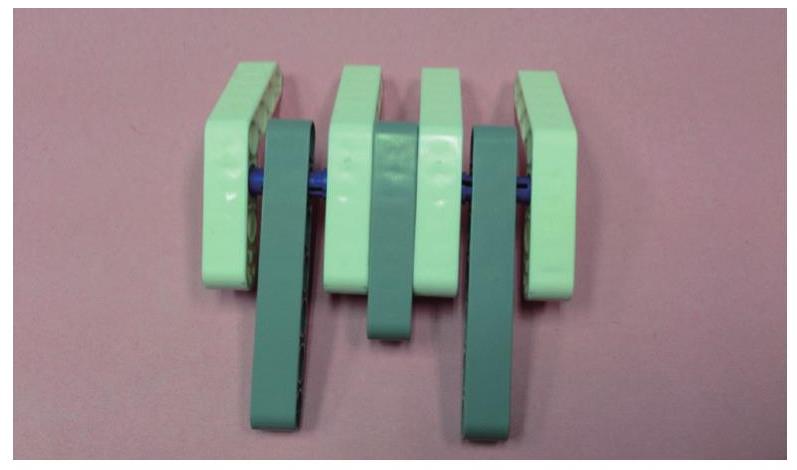
图7-7
第三步:取4×4单弯梁2根,7U梁2根,与长连接销连接,如图7-7所示。
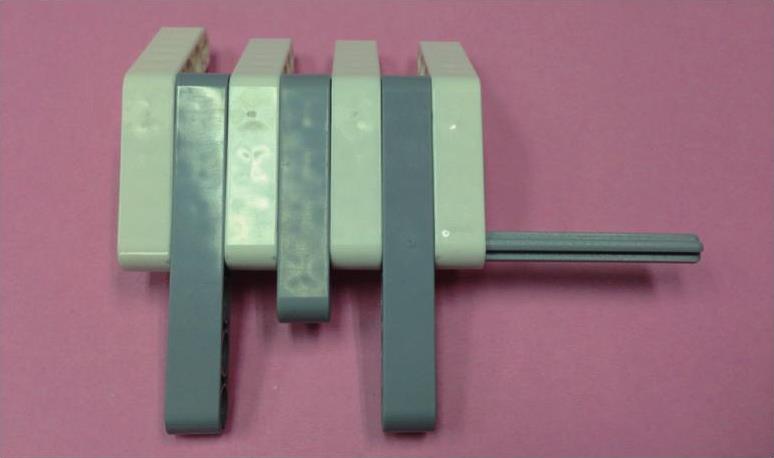
图7-8
第四步:取7U轴1根,从4×4单弯梁的最后一孔穿过,如图7-8所示。
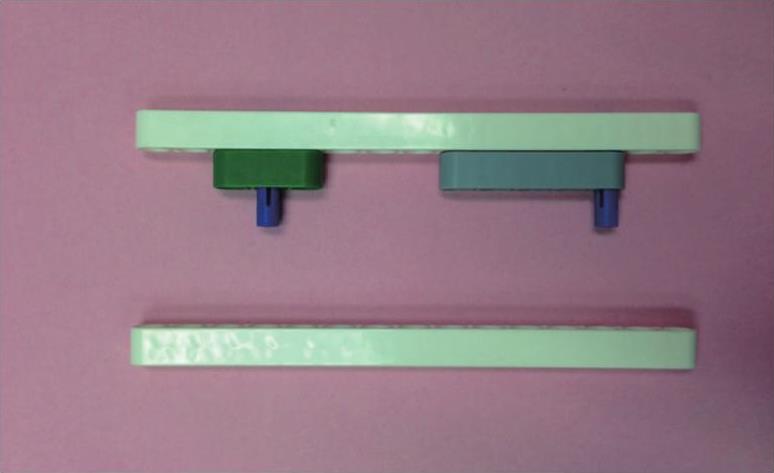
图7-9
第五步:取15U梁2根,5U梁1根,3U梁1根,用2个短连接销连接,如图7-9所示。
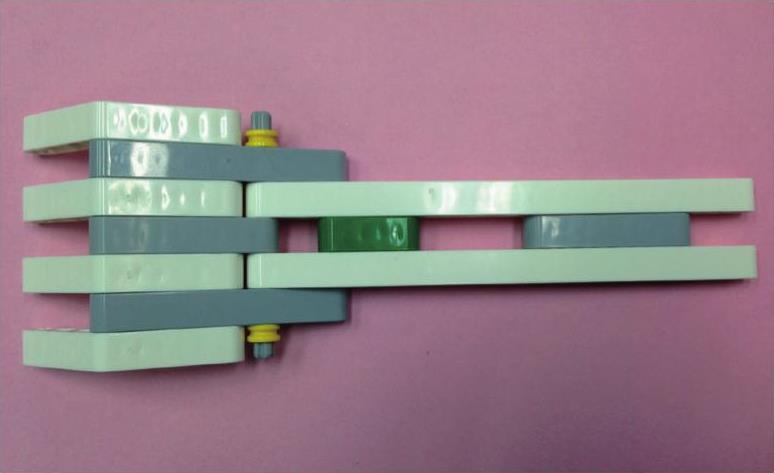
图7-10
第六步:取7U轴1根,从15U梁的第一孔与7U梁的第5孔穿出,用2个半轴套固定,如图7-10所示。
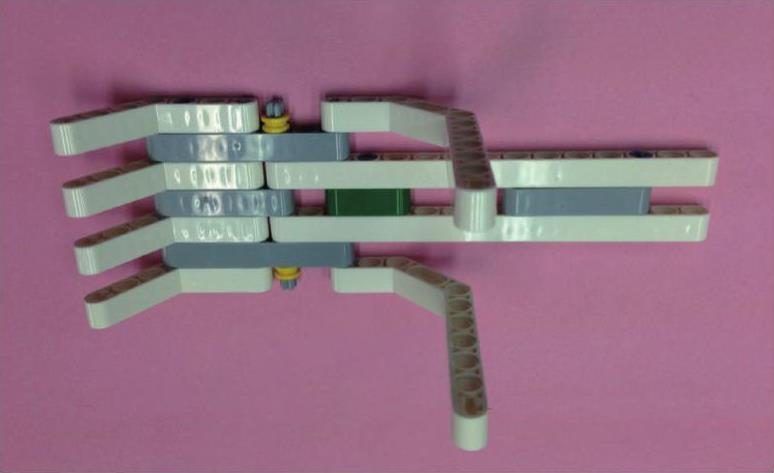
图7-11
第七步:取7U轴从7U梁的第7孔穿出,并与2根11U梁的第1孔固定,如图7-11所示。
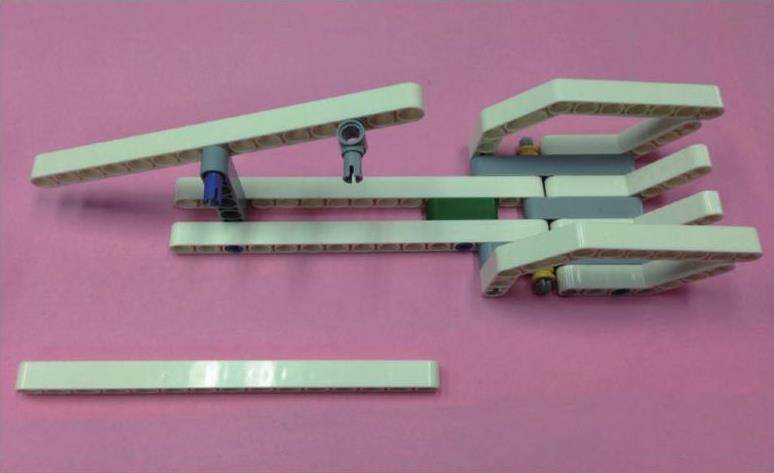
图7-12
第八步:取15U梁2根,用长连接销固定于5U梁第1孔的两侧,2根15U梁用连接销连接,如图7-12所示。
图7-13
第九步:取7U轴从15U梁的第1孔穿出,并与3×7双弯梁的第3孔固定,如图7-13所示。
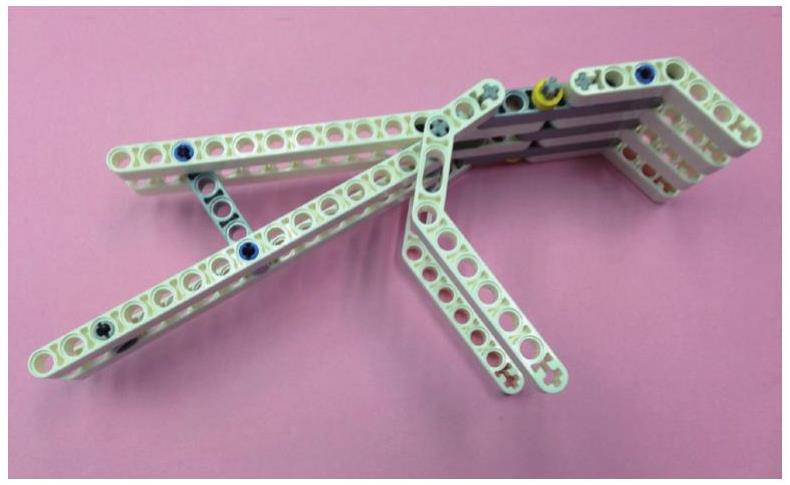
图7-14
第十步:完成作品,如图7-14所示。
回顾
开动脑筋,完成本课任务:
(1)观察你的机械手,手柄处连接方法有哪些妙处?
(2)机械手为什么会动?
拓展
如何实现机械手的半自动?提示:橡胶带。动手改进试一试!
二、平行四边形结构
我们在数学学习中接触过平行四边形,平行四边形在生活中也是随处可见,通常把对边分别相等或对角分别相等的四边形称为平行四边形。
那么,当我们知道了平行四边形的四边长度就可以确定它的形状了吗?答案是:不能。当我们确定了四边边长时,若改变其夹角大小,就会形成无数个边长相同而夹角不同的平行四边形。例如:把两两相等的四根木条用可活动的铰钉钉成平行四边形木框,推动木条可以得出形状、大小各不相同的平行四边形,由此说明平行四边形具有不稳定性(图8-7)。(https://www.xing528.com)
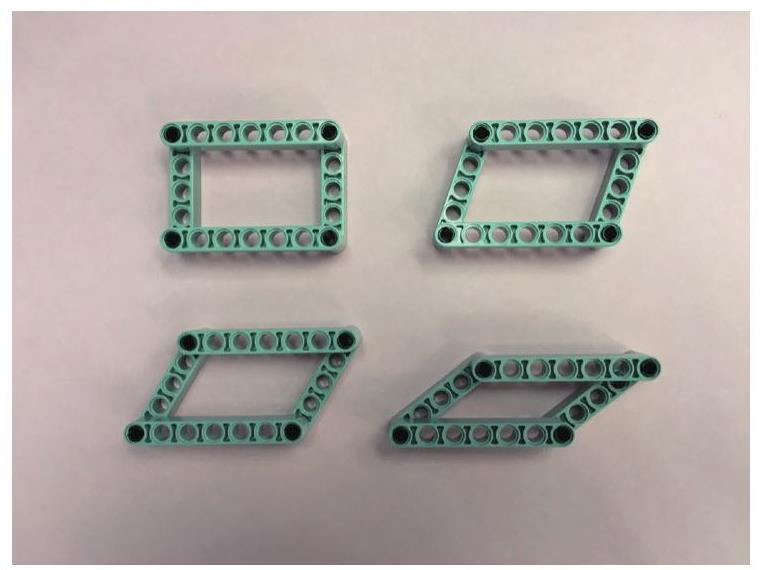
图8-7 平行四边形
平行四边形的不稳定性就是指:平行四边形边长确定,其形状、大小却不能完全确定。
而我们所接触过的矩形、菱形、正方形都是特殊的平行四边形。
在LEGO搭建中,有很多模型需要通过利用平行四边形不稳定性的结构来实现其功能,例如我们今天要进行搭建的伸缩手,正是利用这一不稳定性来实现伸缩功能的。
小知识
平行四边形的不稳定性是指平行四边形边长确定,其形状、大小不能完全确定。
实践
1.任务:制作一个“伸缩手”模型
(1)主体结构坚固、稳定。
(2)模型设计合理、美观。
2.准备(图8-8)

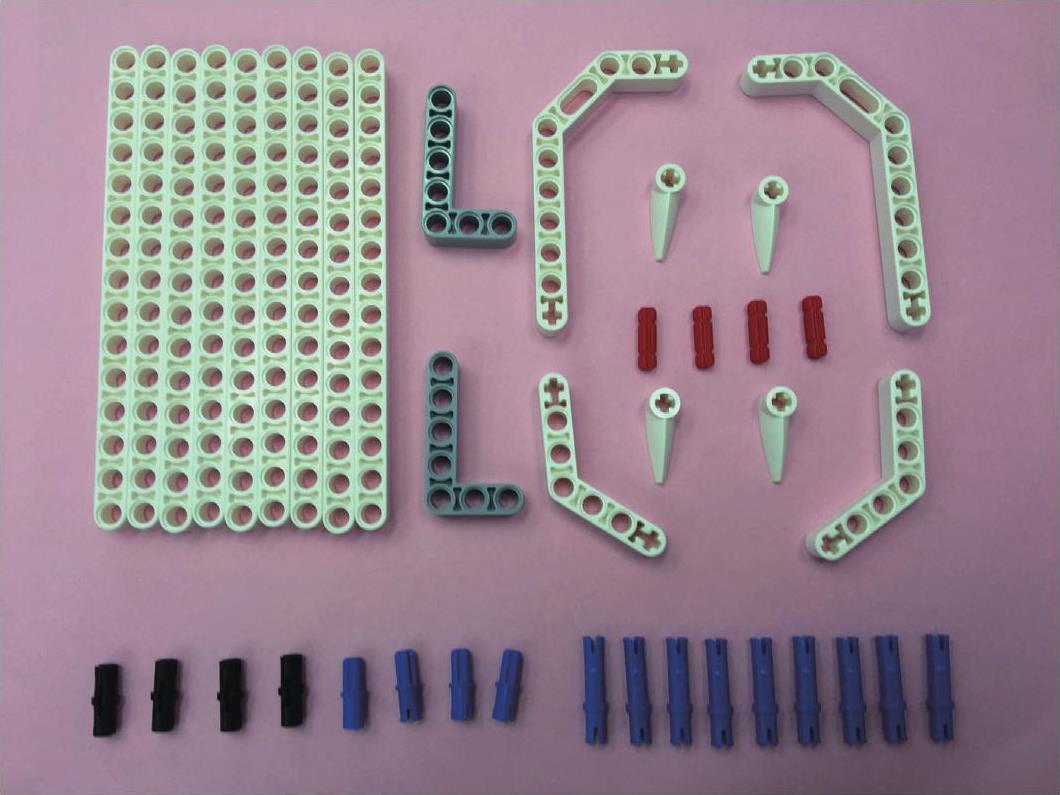
图8-8 “伸缩手”模型零件
3.动手搭建
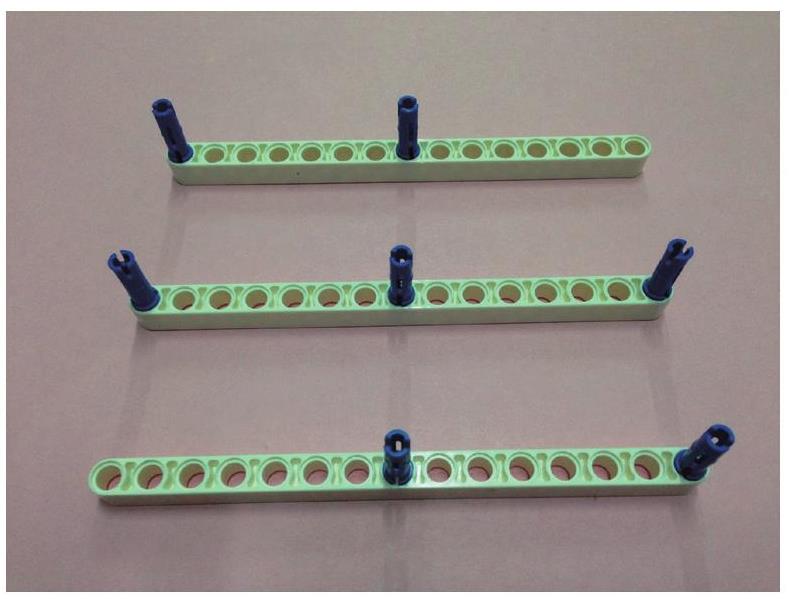
图8-9
第一步:取15U梁3根,将长连接销与梁连接,完成第一层,如图8-9所示。
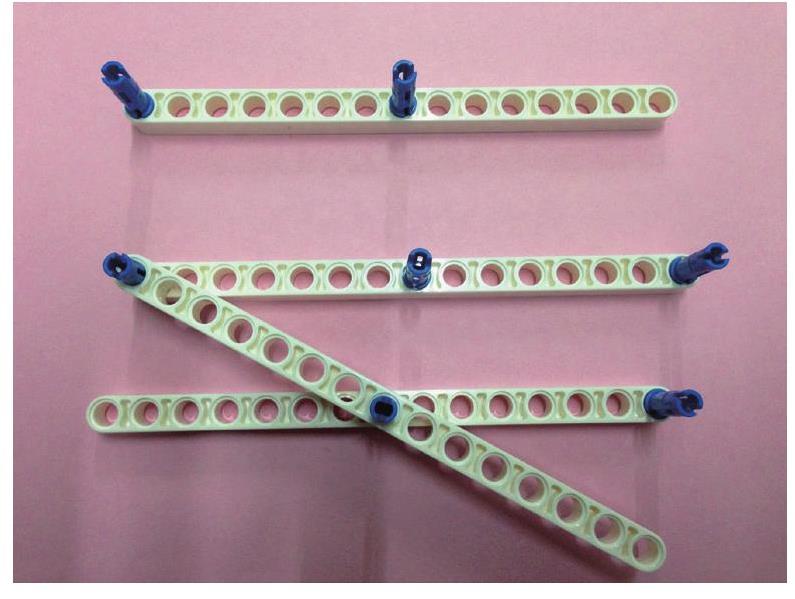
图8-10
第二步:取15孔梁1根,中间孔与长连接销连接,完成第二层第一根,如图8-10所示。
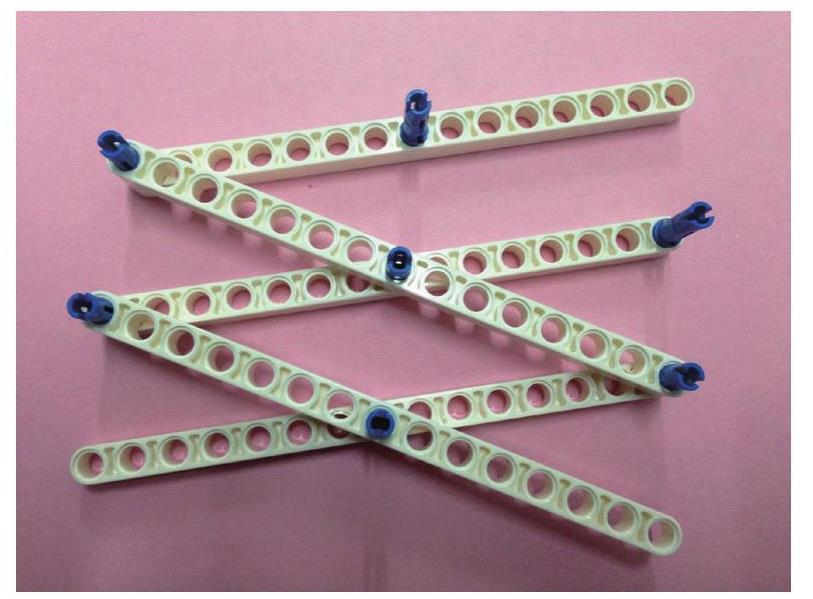
图8-11
第三步:再取15孔梁1根,与长连接销连接,完成第二层第二根,如图8-11所示。
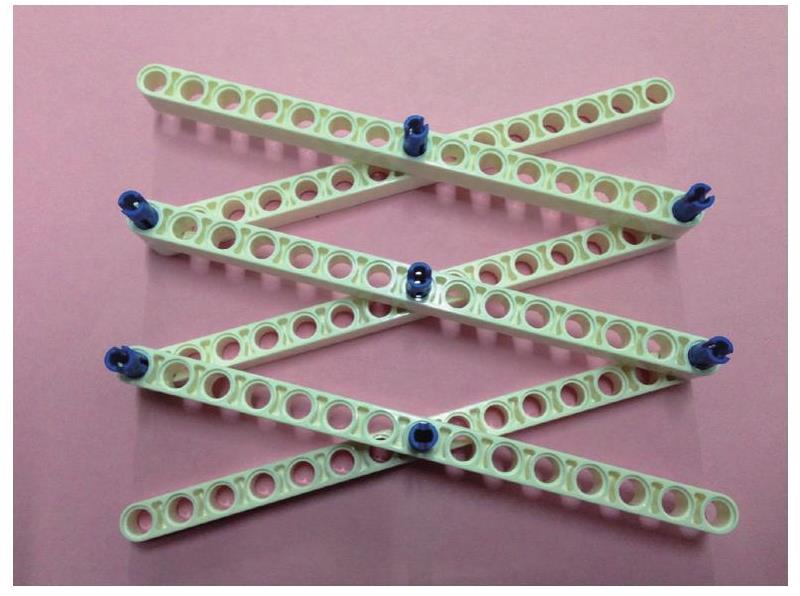
图8-12
第四步:再取15孔梁1根,与长连接销连接,完成第二层第三根,如图8-12所示。
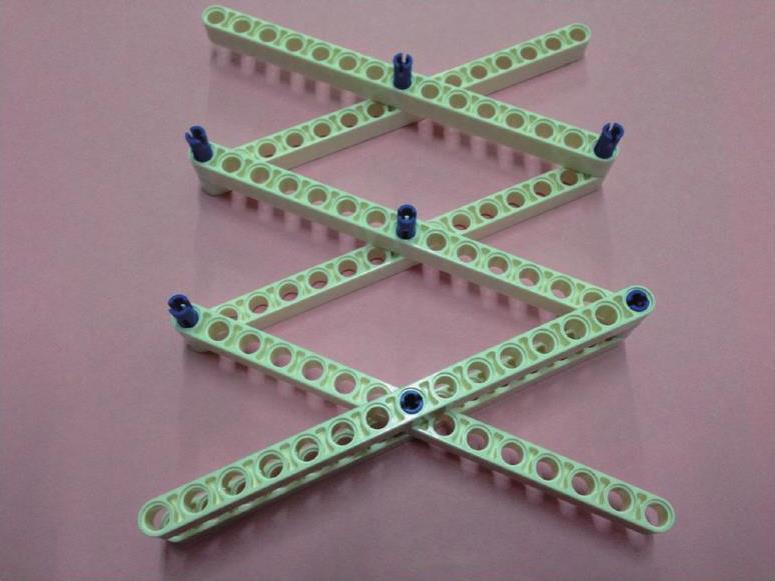
图8-13
第五步:再取15孔梁1根,与长连接销连接,完成第三层第一根,如图8-13所示。
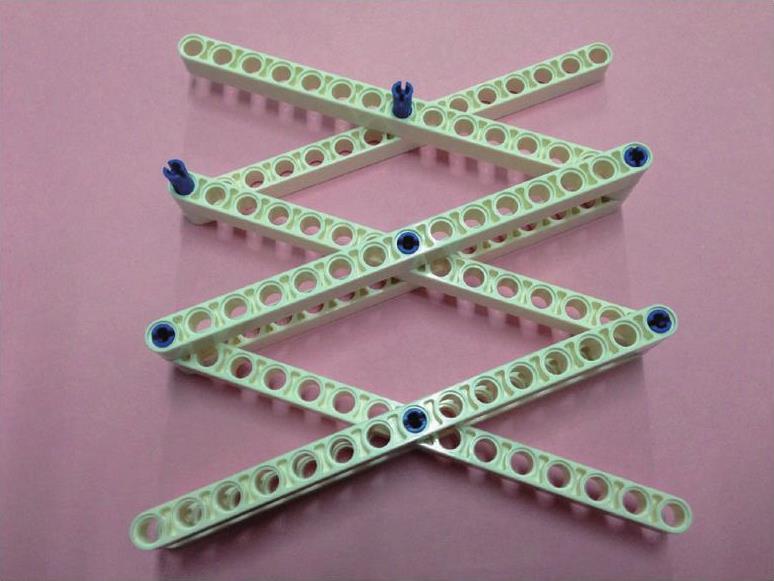
图8-14
第六步:再取15孔梁1根,与长连接销连接,完成第三层第二根,如图8-14所示。

图8-15
第七步:再取15孔梁1根,与长连接销连接,完成第三层第三根,如图8-15所示。
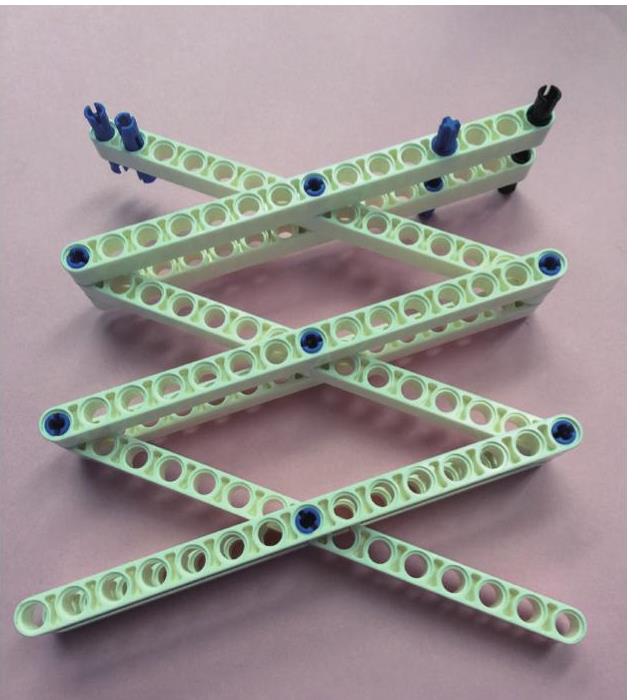
图8-16
第八步:取长连接销2个,短连接销2个,十字连接销2个与梁连接如图8-16所示。
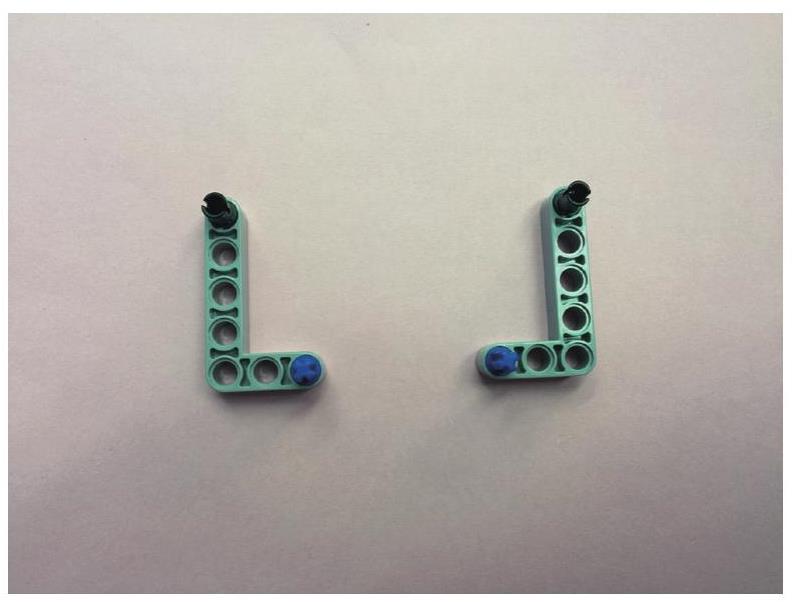
图8-17
第九步:取3×5直度梁2个,短连接销2个,十字连接销2个,完成对称的2组连接,如图8-17所示。
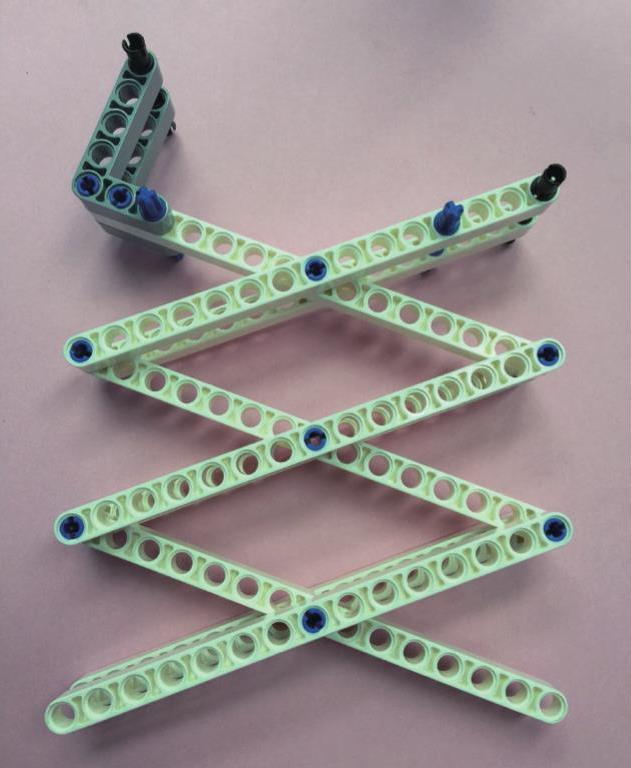
图8-18
第十步:将上一步成品与长连接销相连,如图8-18所示。

图8-19
第十一步:取4×4单弯梁2根,3×7双弯梁2根,2U轴4个,牙型连接器4个,完成4组。如图8-19所示。
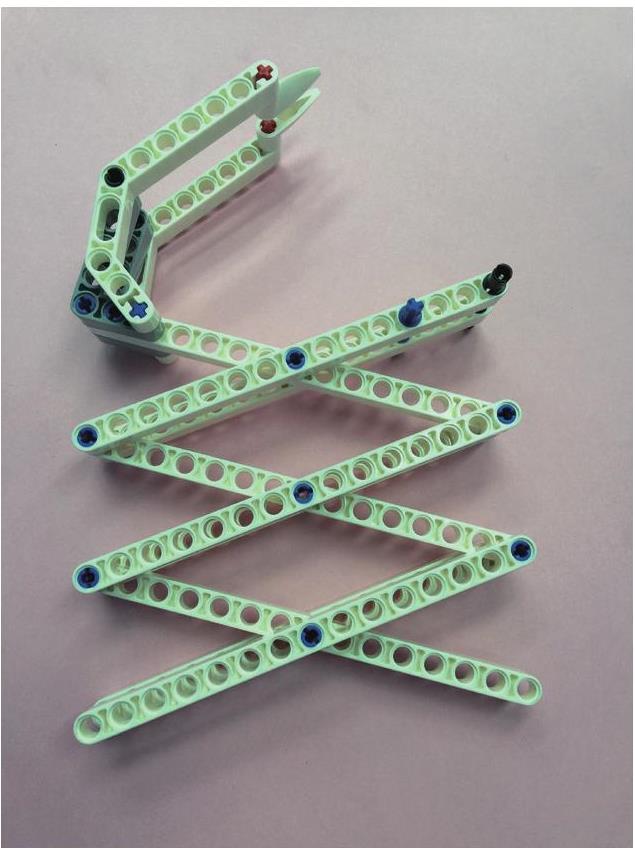
图8-20
第十二步:将3×7双弯梁成品与3×4单弯梁连接,如图8-20所示。
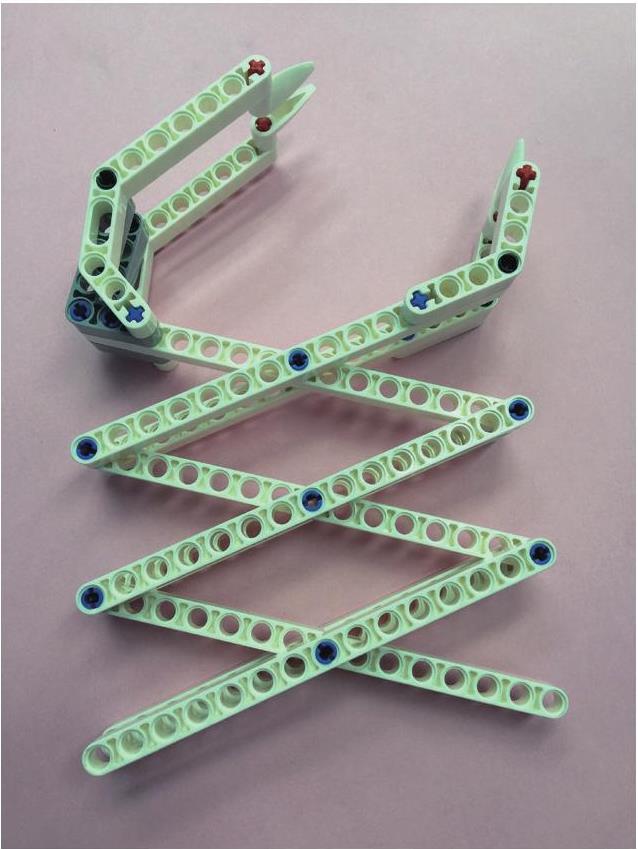
图8-21
第十三步:将4×4单弯梁成品与15U轴连接,完成作品。如图8-21所示。
小知识
搭建中要注意一点,搭建架子时保证15孔梁的中间孔和长连接销连接,这样才能搭建出可以伸缩的结构。
回顾
开动脑筋,解决下面问题:
伸缩手的作用是什么?它采用了哪种结构?为什么?
拓展
思考一下伸缩手在我们的日常生活中能够为人们带来哪些便利?利用所学知识,你能不能对伸缩手进行改进呢?
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。