



人们从远古时代起就会使用杠杆,并且懂得巧妙地运用杠杆。在埃及造金字塔的时候,奴隶们就利用杠杆把沉重的石块往上撬;造船工人用杠杆在船上架设桅杆;人们用汲水吊杆从井里取水等,都是利用了杠杆的原理。但是,杠杆为什么能做到这一点呢?
古希腊科学家阿基米德经过反复地观察、实验和计算,终于确立了杠杆的平衡定律(图5-1)。他还曾经说过这样的豪言壮语:“给我一个支点,我就能撬起地球!”今天我们要搭建的跷跷板就和杠杆原理有关。

图5-1 阿基米德与杠杆原理
知识
一、认识跷跷板
1.各式各样的跷跷板(图5-2)
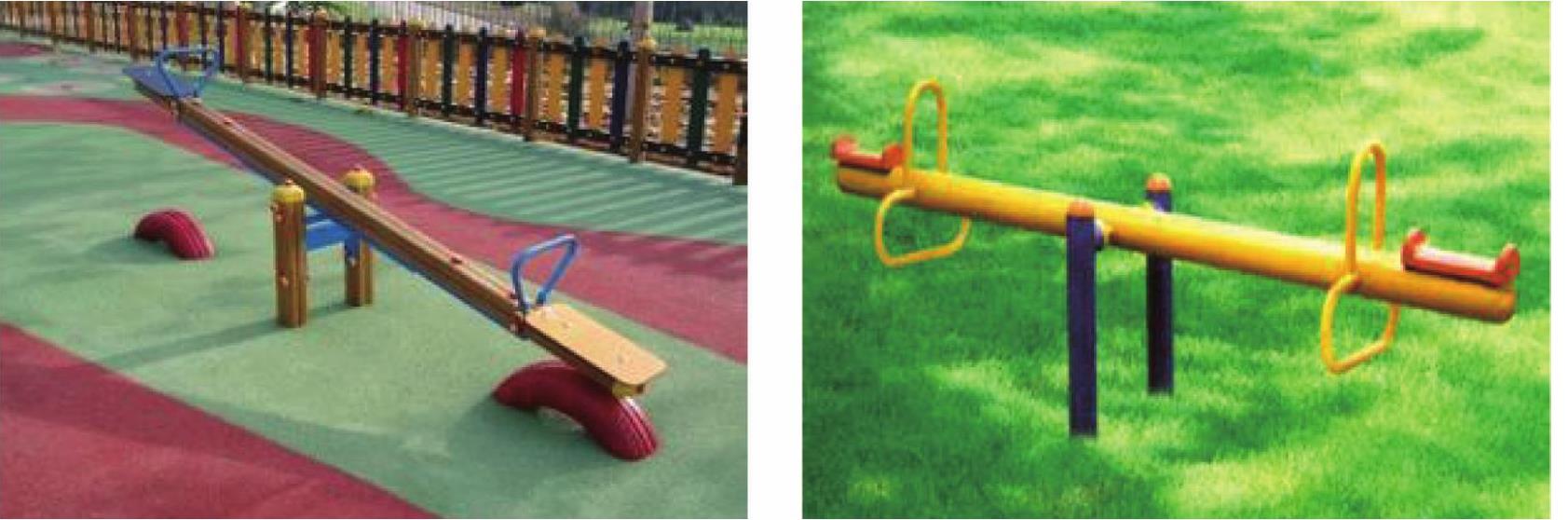
图5-2 各式各样的跷跷板

图5-2 各式各样的跷跷板(续)
2.跷跷板的原理
跷跷板主要是利用了杠杆原理。杠杆原理亦称“杠杆平衡条件”,要使杠杆平衡,作用在杠杆上的两个力矩(力与力臂的乘积)大小必须相等(图5-3)。
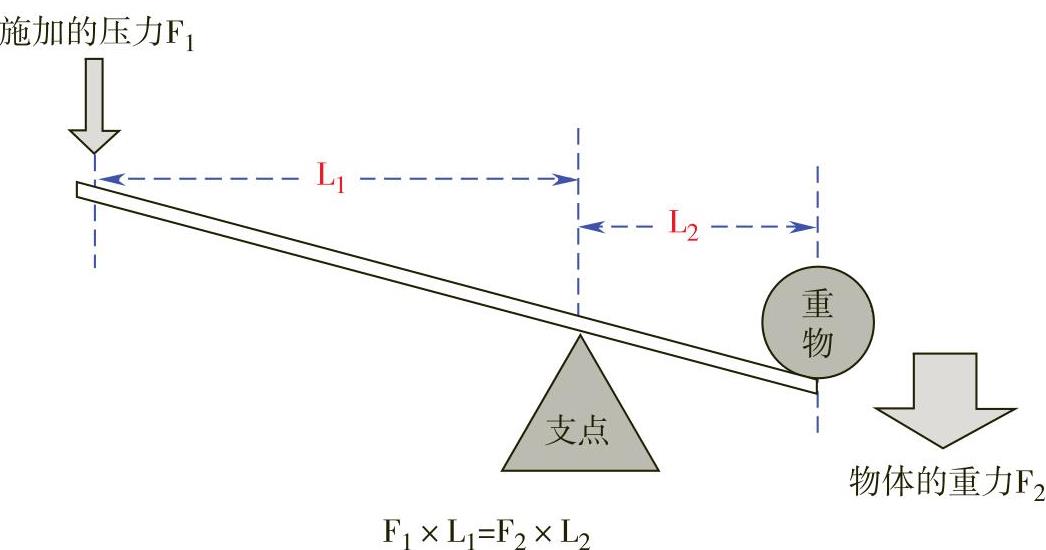
图5-3 杠杆平衡条件
人对跷跷板的压力是动力和阻力,人到跷跷板的固定点的距离均为力臂,重力加速度导致一上一下,高者重力加速度要大于低者,所以高者下降,同时在杠杆原理作用下将低者翘起来,如此循环(图5-4)。
二、LEGO EV3零件介绍

图5-4 跷跷板中的杠杆原理
十字形连接器(图5-5),也叫正交连接器,在搭建中,使用它可以改变轴的连接方向,从而实现轴与梁正交垂直连接。

图5-5 十字形连接器
实践
1.任务要求:制作一个“跷跷板”模型
(1)主体结构坚固、稳定。
(2)模型设计合理、美观。
(3)能够直立于桌面上。
2.准备材料(图5-6)
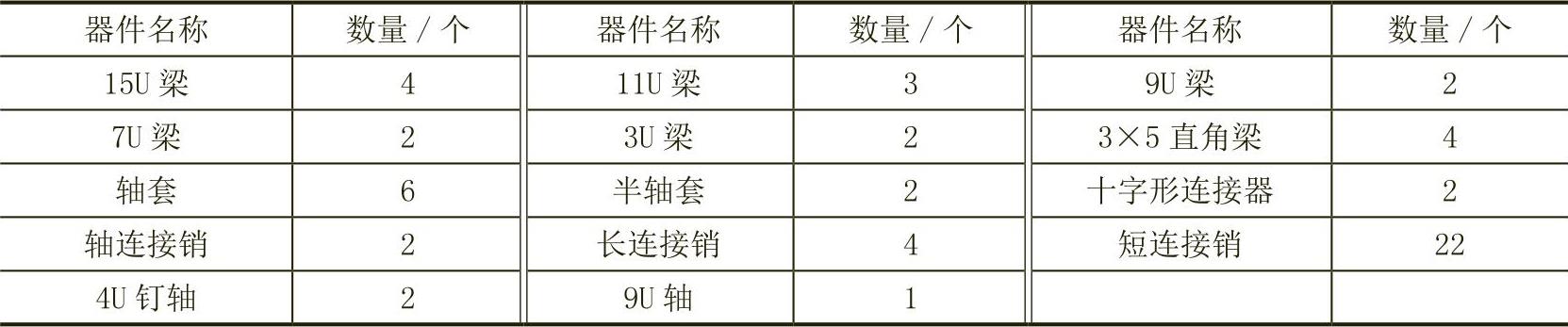
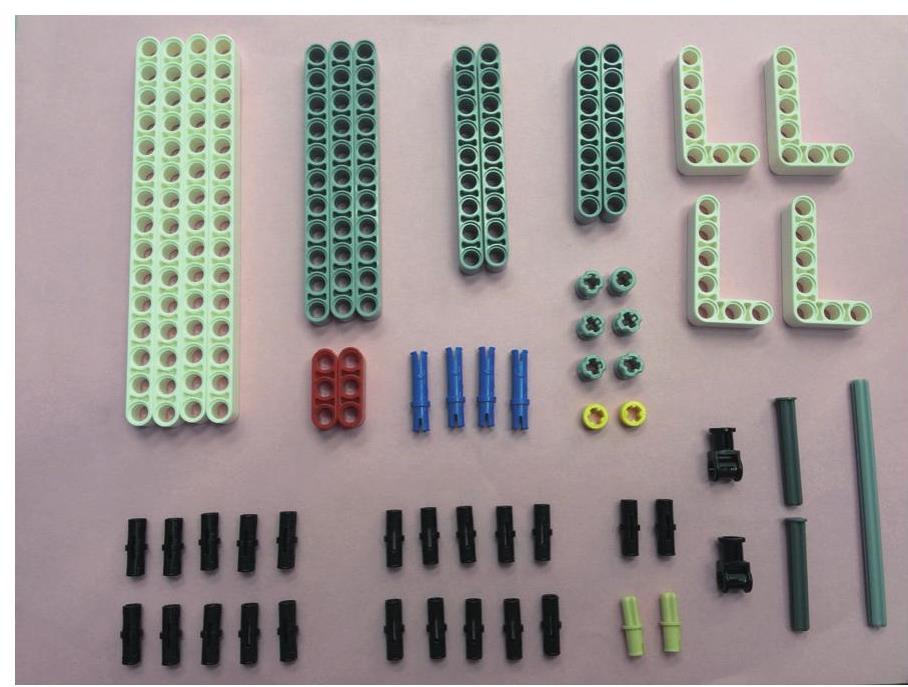
图5-6 准备材料
3.动手搭建
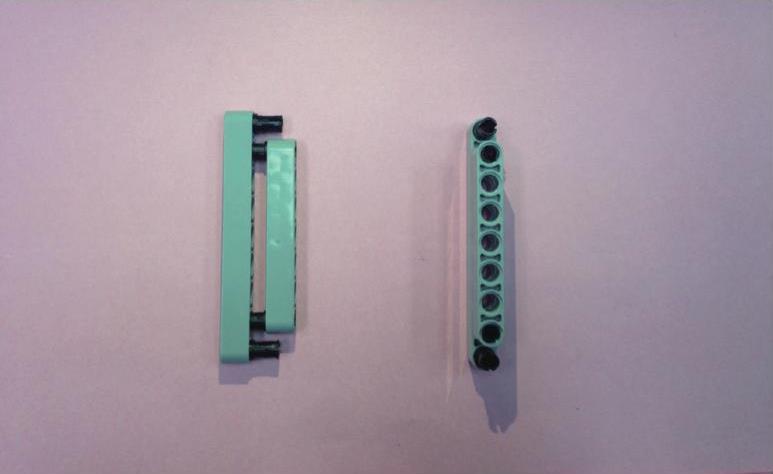
图5-7
第一步:取9U梁2根,7U梁2根,用连接销连接,完成2组,如图5-7所示。
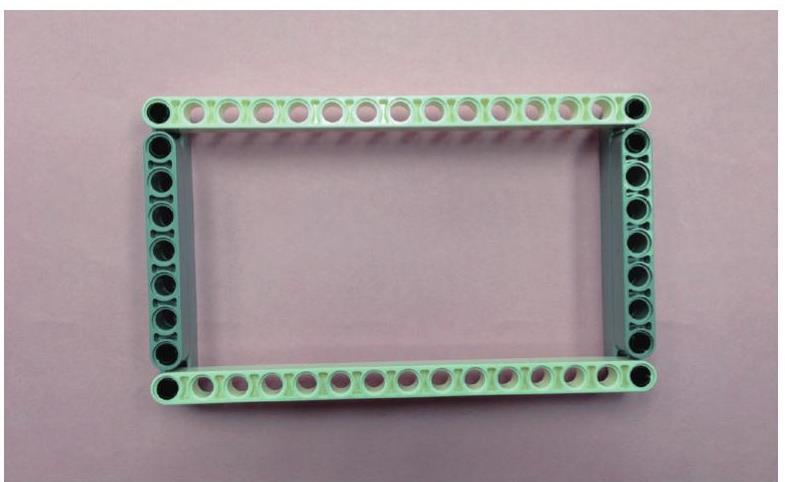
图5-8
第二步:取15U梁2根,与9U梁连接,如图5-8所示。(https://www.xing528.com)
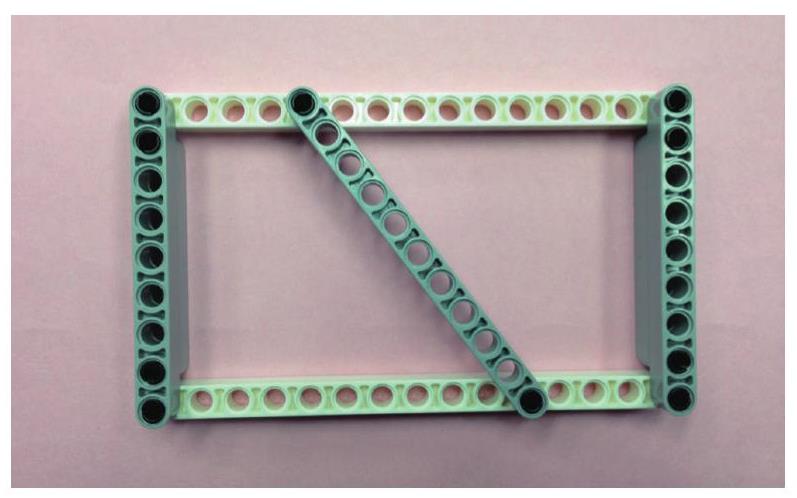
图5-9
第三步:取11U梁1根,将上一步成品翻过来,与15U梁连接使其稳定,如图5-9所示。
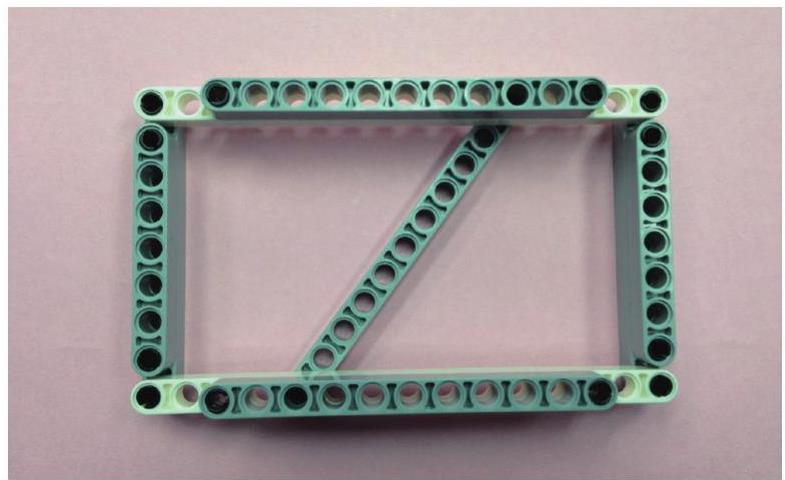
图5-10
第四步:取11U梁2根,将上一步成品翻过来,用短连接销与15U梁连接,完成2组,如图5-10所示。
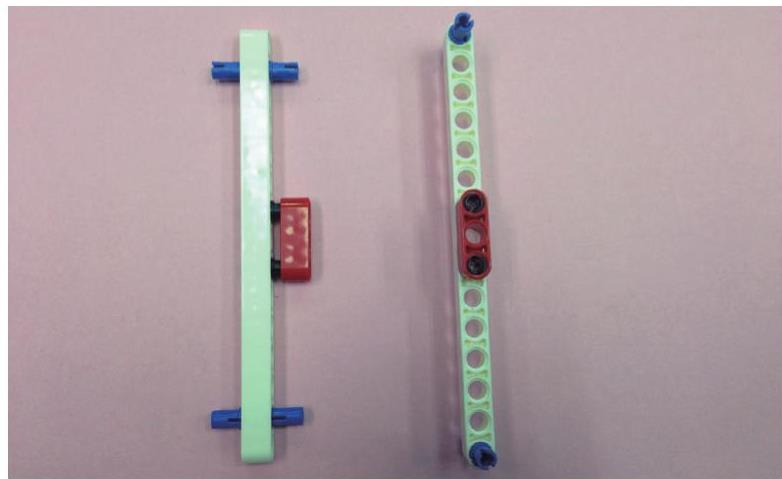
图5-11
第五步:取15U梁2根,3U梁2根,与连接销连接,分别完成2组,如图5-11所示。
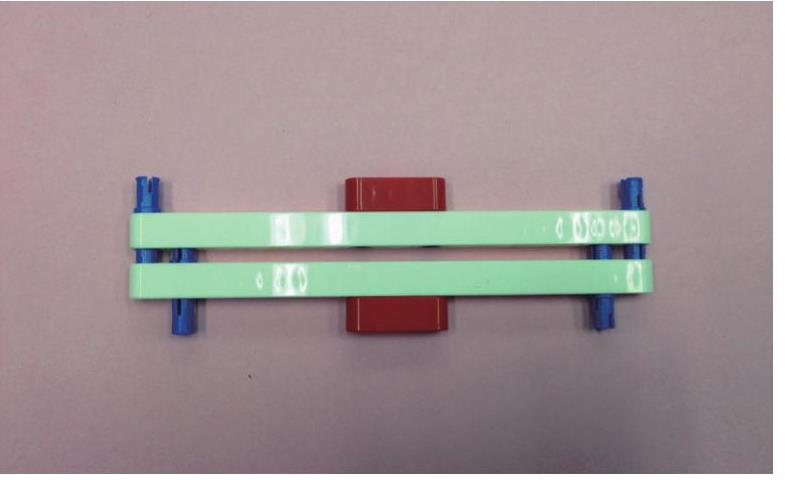
图5-12
第六步:将上一步的2组成果连接在一起,如图5-12所示。
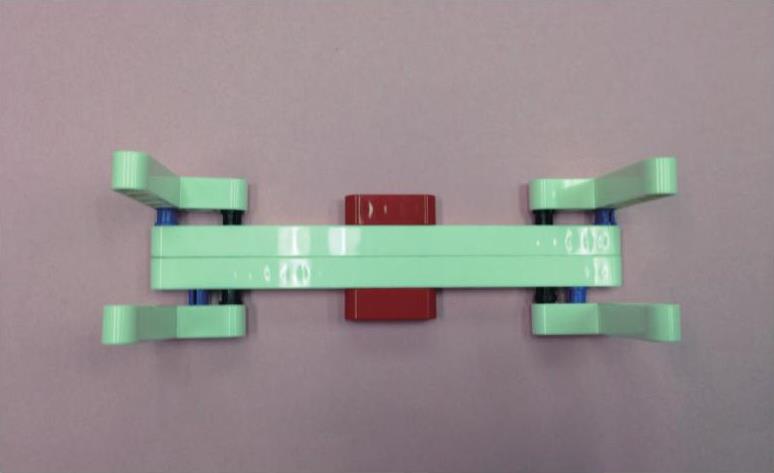
图5-13
第七步:取3×5单弯梁4根,与长连接销相连,完成靠背,如图5-13所示。
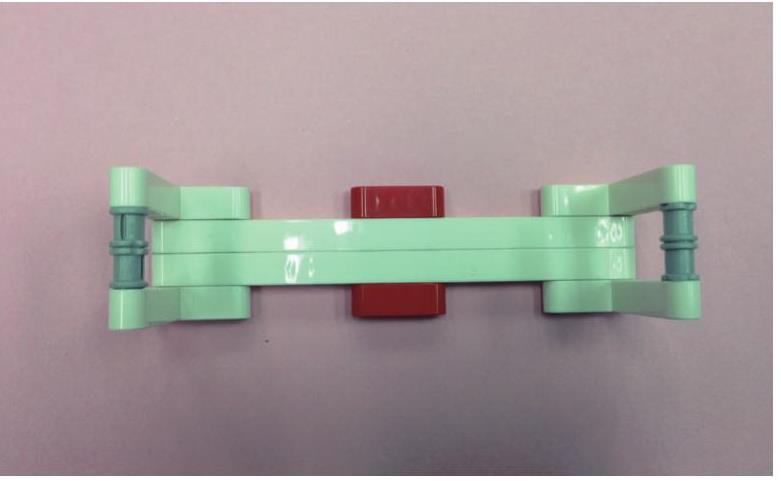
图5-14
第八步:用4U钉轴和轴套固定靠背,如图5-14所示。
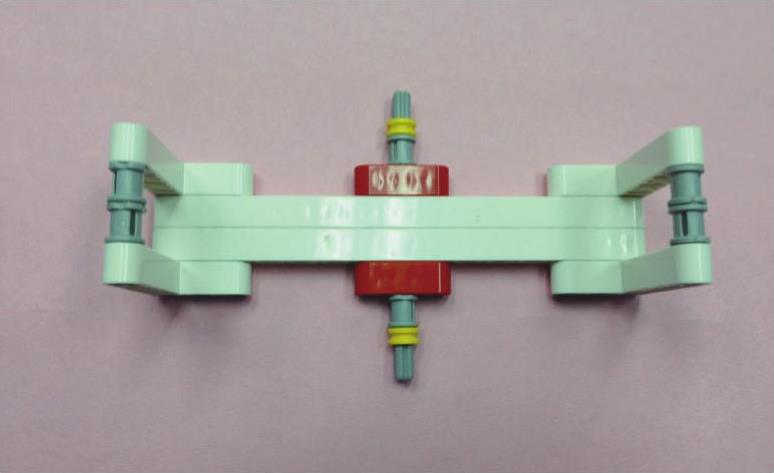
图5-15
第九步:用9U轴、轴套、半轴套固定跷跷板,如图5-15所示。
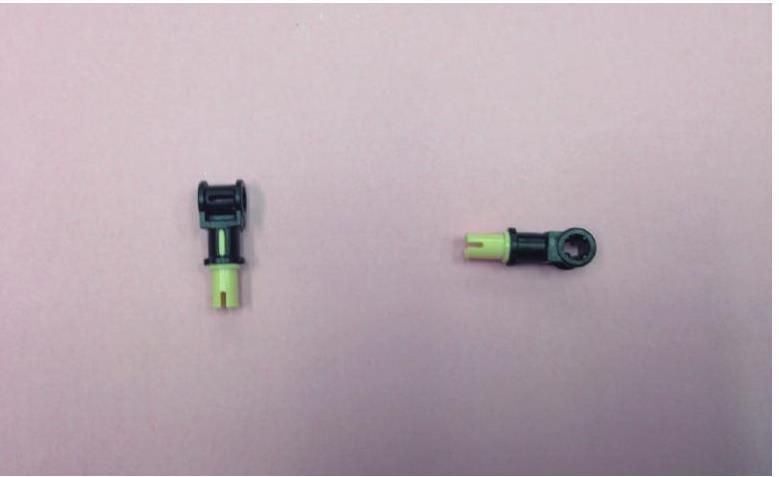
图5-16
第十步:将十字型连接器与轴连接销连接,完成2组,如图5-16所示。
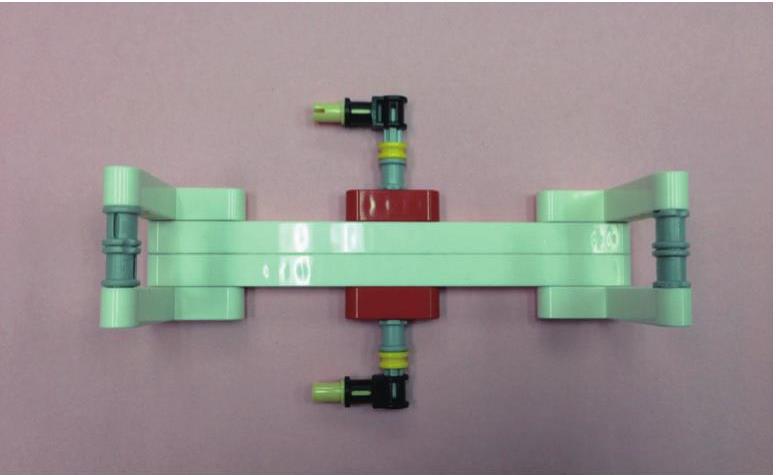
图5-17
第十一步:将十字型连接器与9U轴相连,两个十字型连接器的左右方向一致,如图5-17所示。
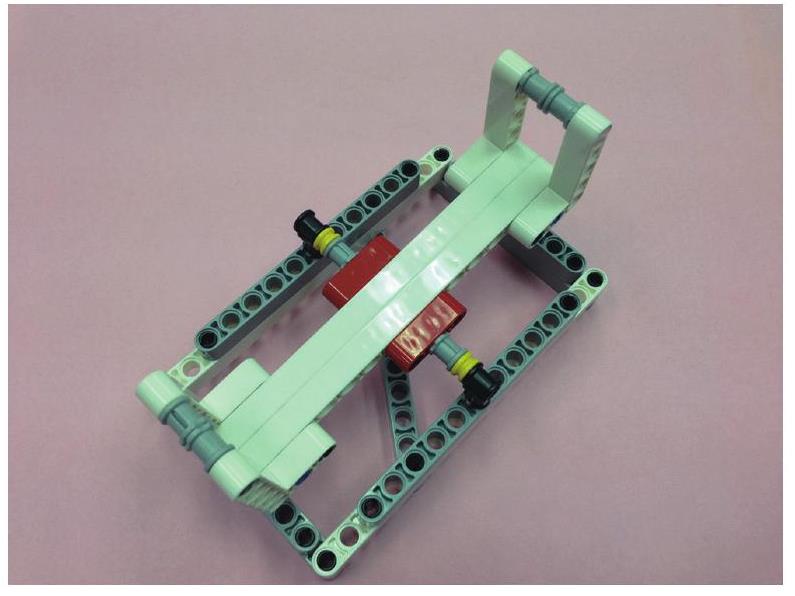
图5-18
第十二步:将上一步成果与底座相连,完成作品,如图5-18所示。
回顾
开动脑筋,完成本课任务:
(1)在制作跷跷板的过程中,你遇到了哪些困难?你是如何解决的?
(2)如何让平行四边形具有稳定性?
拓展
联想生活中所见到过的各种类型的跷跷板,结合本课知识,自己动手搭建有特色的跷跷板吧!
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。