



对于结构简单的构件,如曲轴,弯曲模态或者扭转模态很容易识别出来。但是对于复杂的结构,如BIW或者TB模型,要识别出整体的弯曲或者扭转模态就非常困难了。有时候是整体模态不明显,被其他局部模态所遮盖,或者与其他模态耦合在一起。因此,在进行模态分析和识别时,可能需要做一些预处理。
对于整体模态被局部模态掩盖住的情况,如车身上一些悬臂结构的支架、挂钩等,由于刚度和模态低,有时候它的局部模态会掩盖住车身的整体模态,而使得后者不容易识别。为了解决这一类问题,可以对模型进行适当处理。上述的这些支架、挂钩等零部件,对整体模型的刚度和质量影响甚微,基本不会影响整体模态,并且对这些局部模态不关注时,可以将这些零部件去掉,这样它的局部模态就消失了,整体模态更加清晰。
下面介绍一种26点法识别模态的方法。
该种方法模拟的是实验测试过程,相当于在车身上粘贴了26点振动传感器,对计算得到的所有点的数据进行处理,最终拟合成一条曲线,该条曲线上包含了整车的弯曲及扭转模态信息,从中就可以找到正确的整体模态。
图6.3.3所示为车身振动评价点分布情况,左右对称共取26点。选择的原则是要保证这26个点能够代表车身的整体振动。
图6.3.4所示为加载工况。一般需要重点关注车身的三个主要振动模态,即垂向弯曲模态、横向弯曲模态和扭转模态。因此,可以分为三个工况分别加载。加载点如图中的圆圈位置,加载力的大小为1N,加载方向分三个工况:
工况一:垂向弯曲加载,四个点的加载方向相同,均为竖直向上。
工况二:扭转加载,对角线上的点方向相同。如左前和右后竖直向上,右前和左后竖直向下。
工况三:横向弯曲加载,四个点的加载方向相同,均为水平向右。(https://www.xing528.com)
图6.3.5所示为模态识别结果。从理论上讲,车身的整体弯曲及扭转模态都应该在图中曲线的峰值附近。结合结果曲线,通过模态结果动画,就可以很快找到想要的结果。
26点法模态识别方法不仅仅适用于白车身,其他结构复杂的系统,如TB、整车、副车架等模态难以识别的,都可以利用该方法。
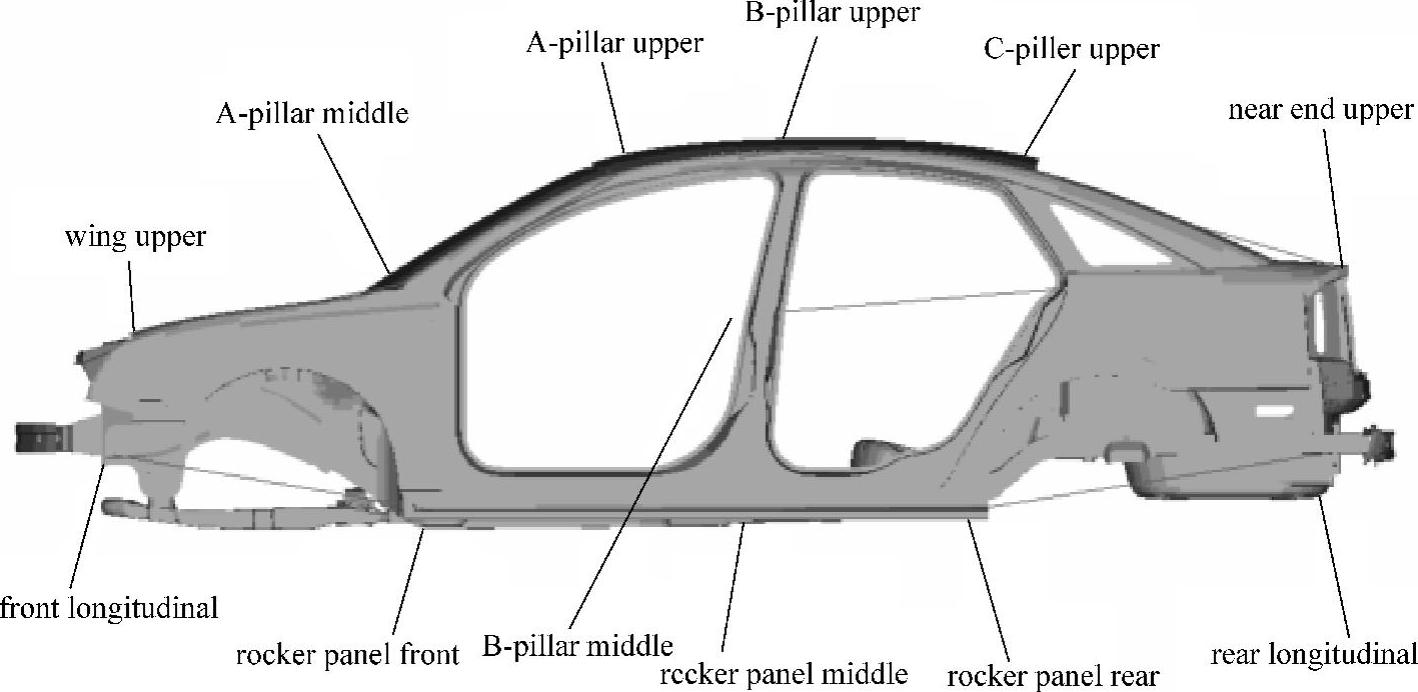
图6.3.3 车身振动评价点分布
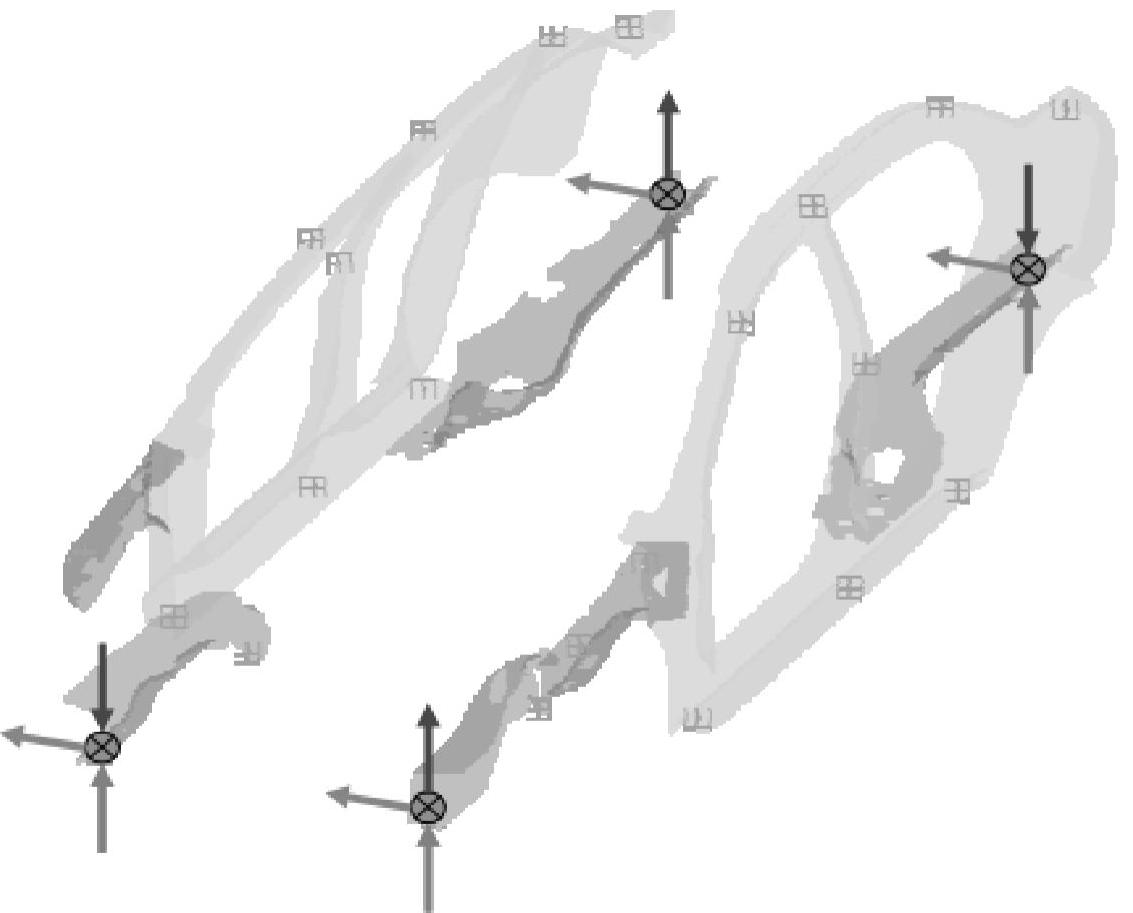
图6.3.4 加载
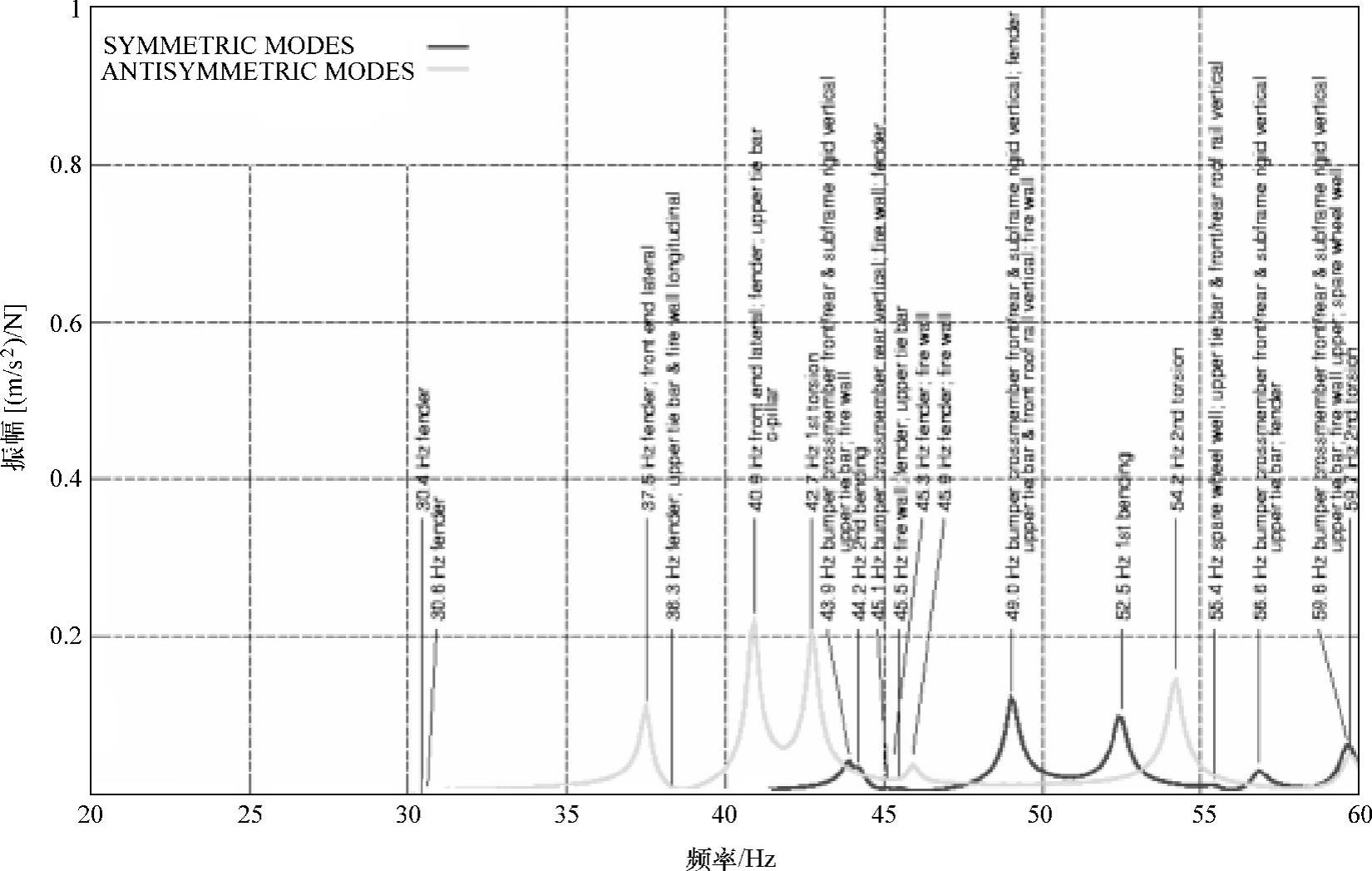
图6.3.5 模态识别结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。