



【摘要】:执行元件模型主要包括三大部件:动臂、斗杆以及铲斗。执行元件系统建模主要涉及三个子模型:特征元件、伸缩缸杆、连接点。此外,伸缩缸杆模拟执行元件液压缸缸杆,驱动各部件运动。伸缩缸杆两端端口则分别连接不同执行元件,从而实现两执行元件的相对运动。图9-10 执行元件系统示意图1—动臂液压缸缸杆 2—动臂 3—斗杆液压缸缸杆 4—斗杆 5—铲斗液压缸缸杆 6—铲斗支架1 7—铲斗支架 28—铲斗
执行元件模型主要包括三大部件:动臂、斗杆以及铲斗。各部件都通过相应液压缸缸杆驱动,实施挖掘作业。
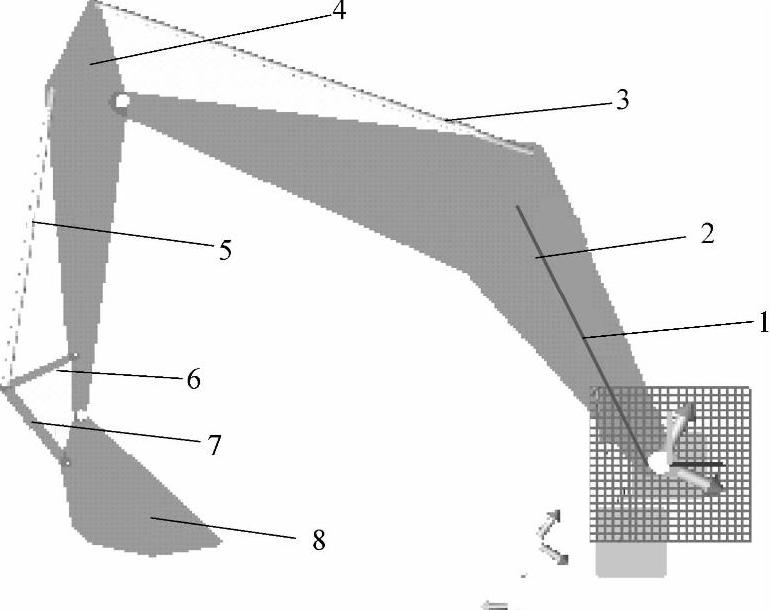
执行元件系统建模主要涉及三个子模型:特征元件、伸缩缸杆、连接点。图9-10为执行元件系统示意图。通过对执行元件自由度的约束以及连接点位置的锁定,特征元件子模型可模拟出实际挖掘机执行元件三大部件的所有特征(形状、材质、重量、旋转角等)。其中,每一个连接点都将实时传递出该处的所有物理特征信息(该点的角速度、初始位置、转矩以及在笛卡儿坐标上的分位移、速度、加速等)。此外,伸缩缸杆模拟执行元件液压缸缸杆,驱动各部件运动。连接点则实现各部件的关联运动。
伸缩缸杆通过右侧端口传入的液压力信号,驱动执行元件作相应运动,而该端口通过输出缸杆运动过程中产生的位移、速度以及加速度,作为控制主阀开度的输入信号。伸缩缸杆两端端口则分别连接不同执行元件,从而实现两执行元件的相对运动。连接点模型主要用于连接相对旋转的执行元件对。在工作过程中,连接点模型将自动计算并实时传递具有相对旋转性质的执行元件对的相对角位移、角速度、角加速度等参数。根据以上对执行元件各子模型的分析,可建立图9-11所示的执行元件模型。通过对部件以及相关参数的配置,该执行元件系统可以实现挖掘机空载工况的动态仿真。
 (https://www.xing528.com)
(https://www.xing528.com)
图9-10 执行元件系统示意图
1—动臂液压缸缸杆 2—动臂 3—斗杆液压缸缸杆 4—斗杆 5—铲斗液压缸缸杆 6—铲斗支架1 7—铲斗支架 28—铲斗
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。