



本节根据负载大小判断挖掘机系统工况模式,并通过对不同模式下负载功率匹配特点的研究,提出混合动力挖掘机负载需求匹配控制策略及应用方案,并根据程度对特殊挖掘机系统负载功率匹配原理的研究[11],建立混合动力挖掘机负载功率的匹配方案,从而为制订动力源输出功率控制方案提供依据。
1.液压挖掘机标况下负载功率匹配
传统液压挖掘机负载功率匹配是动力系统功率匹配不可缺少的环节,其主要控制目标是动力系统的经济性、动力性和操作性。当动力系统输出功率与负载需求功率匹配不当时,燃油发动机工作点将偏离最佳工作曲线,或者导致系统过载,造成能量的较大损失,降低挖掘机整机系统的动力性和经济性。因此需要对包含负载需求功率在内的动力系统关键变量(如转速、转矩、发动机输出功率、负载需求功率、流量、压力等)进行协调匹配控制。通过研究传统挖掘液压系统负载功率特点,建立标准工况下整机负载匹配方案,进而对混合动力挖掘机负载功率匹配提供支撑。
(1)功率控制特性分析 传统液压挖掘机中,燃油发动机负责挖掘机整机能量的供给,其工作点随自身油位的变化进行不同比例的改变,因此通过改变供油量可实现对发动机输出动力的有效控制。目前控制发动机供油量的有效方法是采用挡位分级的方式,以手动或自动调节来实现不同挡位供油量的变化过渡;控制发动机输出功率的有效方法则是采用在高效工作区内时发动机输出转速维持恒定不变,系统长期处于过载情况时结合泵系统调整输出功率降低负载需求的方式[12]。
液压泵的关键控制变量为排量,排量的变化使得泵的输出流量发生变化,从而影响泵的输出功率的变化。对于变量泵而言,泵的排量随其斜盘倾角弧度的变化而变化,因此控制变量泵系统的主要方法是有效控制其斜盘倾角弧度的变化,方法主要有恒功率控制、恒流量控制、恒压力控制等[13-15]。主阀主要通过先导手柄控制其阀芯位移来实现执行液压缸进油回油及其阀口面积的控制。
在工况作业时,液压挖掘执行元件系统将负载需求实时反馈给液压系统,在某种控制策略(如恒功率控制)下,液压泵将及时调整其斜盘倾角以实现对负载需求功率的匹配,同时将该需求反馈给发动机,致使发动机的输出转矩作出调整,环环相扣,使得挖掘机能够顺利地完成施工作业。现有的动力匹配模式主要有5种:自动模式(A)、手动模式(M)、重载模式(H)、标准模式(N)和轻载模式(L)。其中,H模式下的转速区间为[1950r/min,2150r/min],标准模式下为[1600r/min,1800r/min],轻载模式下为[1100r/min,1400r/min]。在控制混合动力挖掘机输出功率时,将根据实际工况需求合理采用与液压挖掘机动力匹配的模式。
(2)燃油发动机与变量泵输出功率的匹配 发动机不同油位对应了不同的输出转速,每一油位分别对应了一对最大、最小输出力矩点,这两点规定了该油位下发动机的安全工作区间。变量泵输出功率与发动机输出功率的匹配控制核心在于发动机除了需满足其输出功率大于负载需求功率外,其本身的输出转矩必须在该油位下的安全工作区内。据此,可得出发动机每一油位下的输出功率范围[16,17]。其发动机输出功率见式(9-8)、泵的输出功率见式(9-9)。
Ne=Tene/9550 (9-8)
Np=PpQp/60=Ppqpnpη/60000 (9-9)
式中,Te表示发动机转矩(N·m);ne表示发动机转速(r/min);Pp表示泵出口压力(MPa);Qp表示泵出口流量(L/min);qp表示泵排量(mL/r);np表示泵的输出转速(r/min);η表示容积有效比率。
若设理想状态下传动效率为100%,液压泵的输出功率无限接近于式(9-10)。
Te=Tp=Ppqp/2π (9-10)
式中,Tp表示泵吸收转矩(N·m)。
在工况作业时,泵输出功率Pp大小取决于负载功率大小。当负载压力未到达溢流阀开启压力时,忽略回流或者阀口节流造成的能量损失,泵输出功率与负载需求功率相等;当液压系统产生溢流现象时,此时负载功率最大,泵的输出功率在满足其需求的同时,调整泵斜盘倾角,使得负载功率降低,达到新的工作平衡点。而在整个控制过程中,为了保证燃油发动机工作在最佳工作曲线附近,变量泵排量qp的调整幅度需要进一步确定。如果满足式(9-11)所示关系,则可实现挖掘机动力系统两端(燃油发动机、变量泵)输出功率的匹配。
Te=Ppqp/2π=常数 (9-11)
(3)液压泵与负载的功率匹配 挖掘机的泵出口压力大小由负载决定,其关系为
Np=NL+ΔN (9-12)
式中,NL表示负载需求功率;∆N为液压系统功率损耗。为实现泵吸收功率-负载功率的匹配,应尽量减小∆N。∆N具体包括在液压回流过程中的溢流损失、节流损失以及管路损失等。
当负载需求增大,由于泵的输出流量不变,其输出压力必然增大,从而导致液压系统动力元件输出功率的增加。而等油位下液压泵输出功率的增加必然造成发动机工作转矩输出量的增大,其工作点将严重偏离最佳工作曲线。各个模块输出功率只有实时保持有效匹配,才能保证挖掘机工作的顺利进行。
负载敏感控制、负流量控制均能实现功率匹配并且降低液压系统的功率损耗,然而前者对于复杂工况的适应性不佳,容易产生压力损失,后者则易造成分流损失。而通过改变液压泵压力-流量曲线并结合负载敏感功能可以实现较好的功率匹配控制。当负载需求功率没有达到溢流情况下液压系统动力元件的输出功率时,负载敏感系统起主导作用,稳定负载需求的同时,保证发动机的最佳工作状态;反之,则通过控制器对泵倾角进行调节完成功率的匹配。
图9-4为负载敏感结合负流量控制下泵与发动机输出功率匹配图。图中L点时发动机处于空转状态,执行元件不工作。当挖掘机开始进行作业时,执行元件系统产生负载需求,发动机处于额定工作点M。随着负载的不断增大,发动机转矩将进一步增加,直至该油位下的最大转矩输出点H。当输出转矩超过H点时,通过改变液泵压力-流量曲线使得发动机工作点始终不超过H点,从而在不影响发动机正常工作的情况下实现负载功率的匹配。
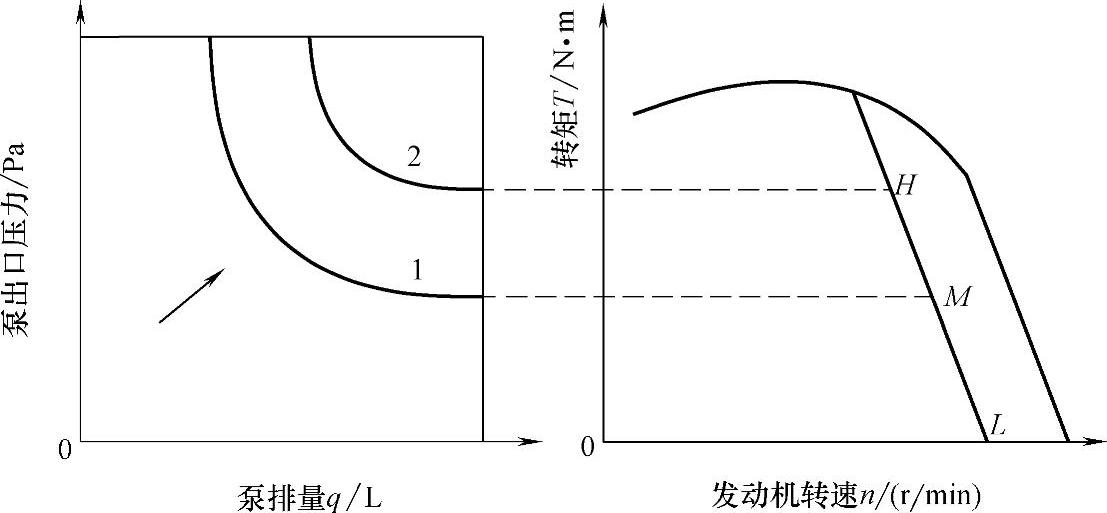
图9-4 负载敏感结合负流量控制下泵与发动机输出功率匹配图
2.液压挖掘机特殊工况下负载功率匹配
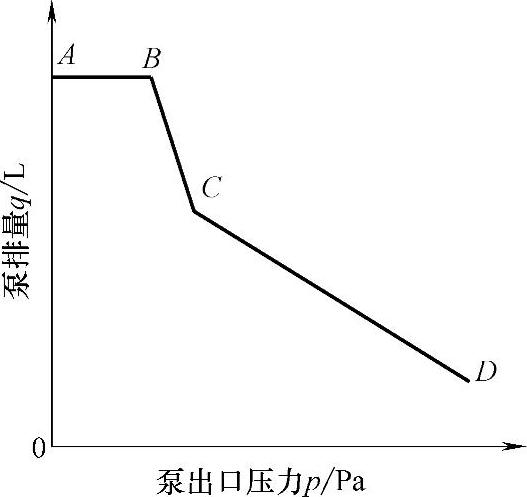
根据功率控制特性分析可知,液压挖掘机的功率控制主要有5种模式。由9.1.2节对发动机、泵、主阀的功率匹配控制的研究分析可知:发动机在不同油门位置所对应的最佳工作点的功率均为恒值。研究不同油门下的恒功率控制对于研究特定工况下的负载功率匹配具有重要意义。通过研究不同油门下液压泵的恒功率p-q变化曲线,可以获得典型环节的恒功率控制策略。图9-5所示为恒功率控制下液压泵p-q曲线。当液压泵出口压力小于B点压力时,其斜盘倾角为1,此时排量最大。当负载压力超过B点时,排量开始逐渐减小,直至压力切断点D。对于标准工况而言,泵的出口压力应控制在AB、BC的中点之间。对于轻载工况,工作点最好控制在AB中点偏左位置,如此可保证挖掘工作的经济性,提高作业效率。
当负载较小时,先导手柄常常保持最大行程,此时主阀阀口全开,控制器可以通过先导手柄和压力传感器的输出信号对此工况进行识别确认,控制负载传感压差控制阀的电流调节到最大,在提高执行元件运动速度的同时增加泵的排量,使工作点稳定在ABC曲线上。
当负载较大时,先导手柄常常控制在最大行程的3/4以内,此时主阀阀口半开,控制器基于先导手柄和压力传感器的输出信号识别工况,并将控制电流调制到最小,在保证执行系统实时作业需求的同时逐步降低负载需求。
 (https://www.xing528.com)
(https://www.xing528.com)
图9-5 恒功率控制下液压泵p-q曲线
当系统发生溢流时,分以下两种情况:一是负载过大使得系统压力升达至溢流压力,然而执行工作装置并没有即时到达挖掘力最大的区域工作,从而导致溢流。这种情况下,通过增加溢流阀的开启压力以发挥挖掘机的正常工作能力。二是执行缸杆已经运动到有效行程的极限位置从而导致系统压力上升。该种情况下液压缸或者马达的能量损失较大,通过调小泵的功率使负载传感阀的压差降为最小,并减小主阀开口,从而避免溢流的发生。
当负载具有波动特性时,发动机的特性曲线如图9-6所示。若阻力转矩的波动幅度较小(如T´tqc),发动机将保持稳定的工作状态;若阻力矩波动较大,且部分力矩处于外特性曲线之上(如T〞tqc),发动机转速将在较大范围内波动,如此发动机功率、转速、燃油消耗均产生剧烈波动,经济性也较差。根据吴永平[19]、何清华[18]等人的研究可知:大幅度波动的阻力矩将会降低发动机燃油经济性,低频高幅负载波动则会对发动机动力性造成严重恶化。因此将发动机的转速稳定在某一范围,可使得在恒功率控制下阻力转矩的工作点处于稳定状态,从而发挥出发动机的性能,提高系统效率。
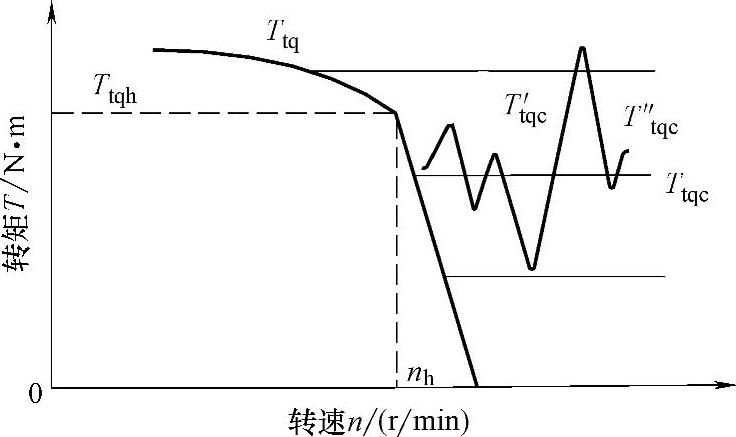
图9-6 波动负载下发动机特性曲线
综上所述,基于轻载、重载、溢流、波动负载工况下液压挖掘机的负载功率匹配分析,为混合动力挖掘机负载功率匹配的研究提供了理论基础。
3.混合动力液压挖掘机负载功率匹配
目前,混合动力挖掘机负载功率匹配的研究在国内还处于起步阶段,相关研究主要集中在混合动力挖掘机参数匹配方面,如液压挖掘机混合动力系统产品结构、整定工作性能参数等[20-22]。这些工作的核心是:基于整体到局部的目标优化方法,建立式(9-13)所示的全局效率目标函数,使其效率最大化。
η=maxEo/Ei=max(Ed+∆Ec)/Ei (9-13)
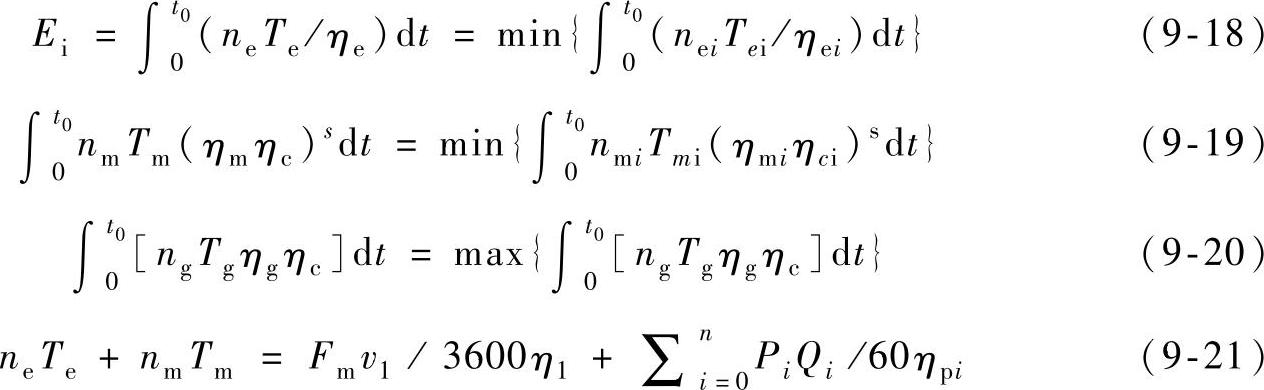
式中,η为系统效率;Eo、Ei、Ed、ΔEc分别为系统的输出、输入能量,驱动负载所做的功、电容器因变化而产生的能量,它们的计算公式如式(9-14)、式(9-15)、式(9-16)所示:

式中,ne为发动机的转速;Te为发动机的转矩;ηe为发动机的效率。

式中,Fm表示平均有效牵引力;v1表示1挡行驶速度;Pi表示泵系统输出压力;η1表示1挡传动效率;ηpi表示第i个采样时刻泵系统工作效率;Qi表示第i个采样时刻泵系统输出流量。

式中,ng、nm、Tg、Tm分别为发电机和电动机的转速和转矩;ηg为发电机的效率;ηm表示电动机工作效率;s表示电容充放特性参量;ηc为电容效率。
将式(9-14)、式(9-15)、式(9-16)代入式(9-13)可得系统的效率为

根据恒功率控制可知,在某工况下,泵输出功率基本不变,要让系统达到最优目标,则发动机、电动机、发电机和电容器的参数需满足如下条件(i=0,1,…,n):
Pe=min{Pei} (9-22)
Pm=min{Pmi} (9-23)
Pg=min{Pgi} (9-24)
C=min{第i时刻电机所测电容Ci} (9-25)
通过求解此目标优化方程,可以获取在任意负载工况下动力源功率的优化值。但是这种方法没有涉及负载需求功率、泵吸收功率以及混合动力源的输出功率的匹配关系。如何根据工作装置的负载大小决定泵的吸收功率,如何根据泵的吸收功率分配燃油发动机、电动机的输出功率,泵的选型(恒功率变量泵、恒功率常量泵、变功率泵)对于混合动力挖掘机的参数匹配控制具有什么影响等,是研究混合动力挖掘机功率匹配控制所面临的一些特有的问题。本文主要研究混合动力挖掘机动力源功率匹配控制,据此对于负载功率匹配可参照9.1.3节所提供的传统液压挖掘机负载功率匹配方案,在研究动力源输出功率的基础上对负载功率匹配所涉及的泵与阀进行相应约束。
对于混合动力挖掘机而言,泵的吸收功率与工作装置的需求功率匹配方式与传统液压挖掘机相同,即吸收功率等于负载需求功率与液压系统损耗功率之和;而在动力源输出功率与液压泵吸收功率的匹配上则有所差异。在恒功率控制下,若吸收功率小于动力源在高效工作区的输出功率时,传统液压挖掘机主要通过负载敏感系统对液压系统进行调节,例如增加执行元件运动速度、升高负载传感控制阀的电流、加大泵排量等,实现动力源与泵的功率匹配。对于混合动力挖掘机可采用以下两种模式:当蓄电池SOC大于最小荷电状态时,可采用传统液压挖掘机的功率匹配方法;当SOC小于最小荷电状态时,则可保持泵的排量不变,即无须调整负载需求功率大小,在满足需求功率的前提下,将剩余的功率用于驱动发电机对蓄电池充电。若吸收功率大于动力源在高效工作区的输出功率时,传统液压挖掘机采用的方法是通过减小负载传感电流使得在稳定发动机工作点的前提下,减小泵的排量,从而达成功率的匹配。而此工况下的混合动力挖掘机,当SOC大于最小荷电状态时,可在保证泵的吸收功率不变的前提下,电动机辅助提供驱动力矩,以供应较大需求的负载吸收功率;当SOC低于最小荷电状态时,又可采用传统挖掘机在该工况下的功率匹配模式。
由这些分析可知,混合动力挖掘机的负载功率匹配在恒功率控制下能够实现,然而因其控制策略更为复杂,对于控制模块的硬件质地以及电气系统的设计要求就更高,因此在设计整个混合动力挖掘机电气系统时需结合相关结构参数进行综合考虑。此外,在负载吸收功率高于燃油发动机额定功率与电机额定功率之和时如何克服其功率匹配问题、如何对低频高幅的负载波动工况下的混合动力挖掘机负载功率匹配进行控制等这些特定工况下的混合动力挖掘机负载功率匹配,是值得深入研究的方向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。