



控制策略是混合动力汽车的主要组成部分,是提高混合动力汽车经济性、动力性和减少废气排放量的关键技术。一种优良的控制策略能够使总能量在各动力源之间得到合理分配,最终在满足驱动性能和制动性能的前提下使燃油经济性达到最优,因此对混合动力汽车的控制策略进行研究不仅可以合理分配发动机和电机所提供的转矩大小,而且在节约能源和减少废气排放方面具有重要的研究价值。
在设计混合动力汽车控制策略时,采用不同的控制策略的目的是车辆在限定条件下达到不同的最优设计目标。其主要目标有以下四个:最佳燃油经济性、最低排放、最低系统成本或最佳驱动性能。设计控制策略时主要应考虑以下几点[16]:
(1)优化发动机的工作点 基于燃油经济性、最低排放或者二者选其一,根据发动机的转矩-转速特性曲线确定工作点。
(2)优化发动机的工作曲线 如果发动机需要发出不同的功率,相应的最优工作点就构成了发动机的最优工作曲线,如最大燃油经济性工作曲线。
(3)优化发动机的工作区 在转矩-转速特性曲线上,发动机有一个最优的工作区,在此工作区内,燃油效率最高。
(4)限制发动机最低转速 当发动机低速运行时,燃油效率低,排放严重,因而当发动机转速低于某一值时,应停止发动机的工作。
(5)合适的蓄电池荷电状态 蓄电池的容量需保持在适当的水平,以便在汽车加速时能提供足够的功率,在汽车制动或下坡时回收能量。
在混合动力汽车结构及各部件确定后,如何优化控制策略是实现混合动力汽车低油耗、低排放目标的关键所在[17]。而控制策略的制订是一个全局多目标优化问题,不仅仅要实现整车最佳的燃油经济性,还要考虑适应各种工况,兼顾发动机排放、蓄电池寿命、驾驶性能、各部件可靠性及整车成本等多方面要求。
串联式、并联式和混联式混合动力汽车的结构组成和工作原理各不相同,因而其控制策略也各具特色。串联式混合动力汽车的发动机不直接驱动汽车行驶,其控制策略的主要目标只是将发动机的运行区域限制在最佳效率和排放区域。并联式混合动力汽车有两套独立的驱动系统,其控制策略则依据采集到的混合动力汽车各部件数据,选择不同的运行模式,合理进行动力分配,提高整车性能。混联式混合动力汽车较并联式多了一套发电系统,其控制策略以并联式混合动力汽车控制策略为基础。本书将针对典型的串联式功率跟随控制策略和并联式电辅助控制策略进行建模分析。
ADVISOR控制策略模块对应的M文件位于“\ADVISOR2002\data\control”文件夹中,建模过程中可新建控制策略模块的Simulink模型及M文件或在已有基础上修改模型及M文件参数。
1.功率跟随控制策略
发动机的功率紧紧跟随车轮功率的变化,这与传统的汽车运行相似。采用这种控制策略,电池组频繁充放电工作循环将消失,与充放电有关的电池组损失被降到最低程度。但发动机必须在从低到高的整个负荷区范围内运行,而且发动机的功率快速而频繁地变化,这些都损害了发动机的效率和排放性能(特别是在低负荷区)[18]。
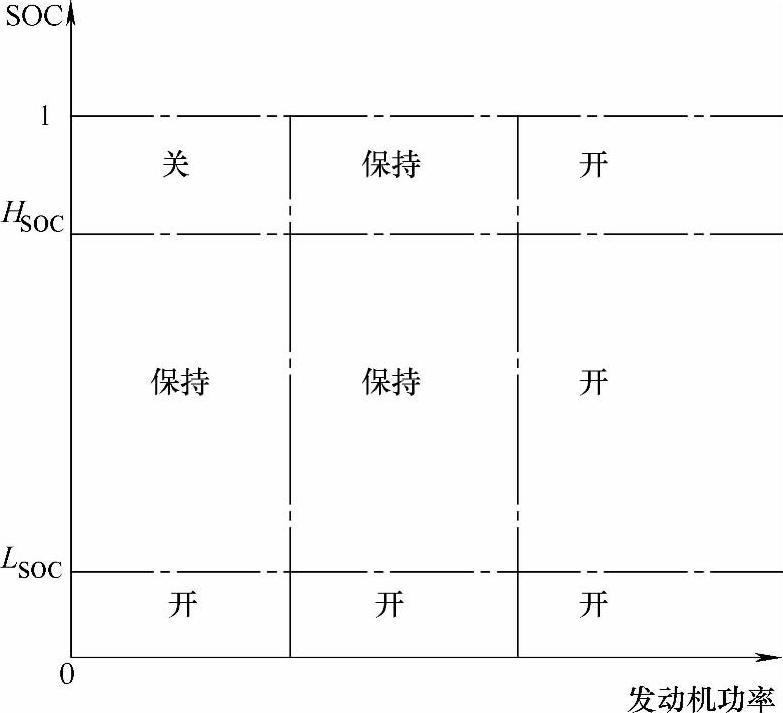
图4-29 功率跟随控制策略发动机起停逻辑图
这种模式的控制策略主要是对发动机的油耗进行最优控制,即以最低燃油消耗为目标调节发动机在某一工作曲线上工作,强迫发动机的输出功率随着车辆需求功率的波动而动态响应,进行自适应调整,电池组作为功率均衡装置来满足具体的汽车行驶功率要求。这种模式的控制策略能够保证发动机不在效率和排放较差的低功率环境下运行,有利于提高整车的燃油经济性和排放性。这种控制策略对电池组的损失比较少,但是损失了发动机的效率和排放性能。功率跟随控制策略发动机起停逻辑图如图4-29所示。
在跟随模式控制策略中,要弄清一个重要的概念即发动机的修正功率,即当电池SOC值小于期望的SOC值时,发动机发出的功率除了要满足路面功率需求外,还要预留一部分补充功率来对电池进行充电,而当电池SOC值大于期望的SOC值时,则让发动机发出的功率小于路面需要的功率,不足的功率由电池来提供,目的是时刻将电池SOC维持在期望值。我们把发动机发出的那部分功率称为修正功率(或补充功率),即发动机输出功率的时候首先要考虑电池SOC情况。这种控制策略在一定程度上能够分别对电池和发动机起到较优控制,比恒温器模式考虑周全,因为恒温器模式只是在某一极端程度对发动机实现最佳控制,而没有考虑电池的状态,这样导致电池的充放电效率不高,并对电池寿命不利。跟随模式则可以同时考虑到电池和发动机的状态,其实它还可以控制发动机使其在某一些高效区域内工作。从总的效率来说,跟随式要比恒温器式好。功率跟随控制策略的功率流向与恒温器控制策略相同,可分为以下几种工作模式:
(1)电池单独提供驱动功率模式 当功率跟随控制策略关闭发动机时,存在如下功率平衡关系:

(2)发动机单独驱动模式 当电池组荷电状态低于期望值时,发动机输出的功率不仅要满足路面功率要求,还需对电池进行充电。对电池进行充电的功率大小主要由电池组荷电状态的当前值与期望值之间的差值来决定,其存在如下功率平衡关系:
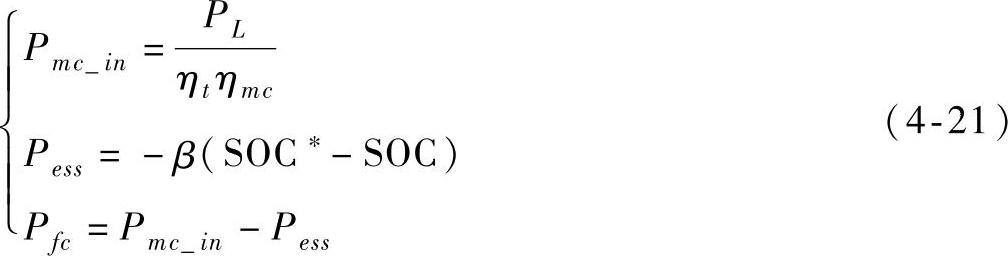
式中,β表示电池组充/放电功率系数;SOC为电池组荷电状态值;SOC*为电池组荷电状态期望值。
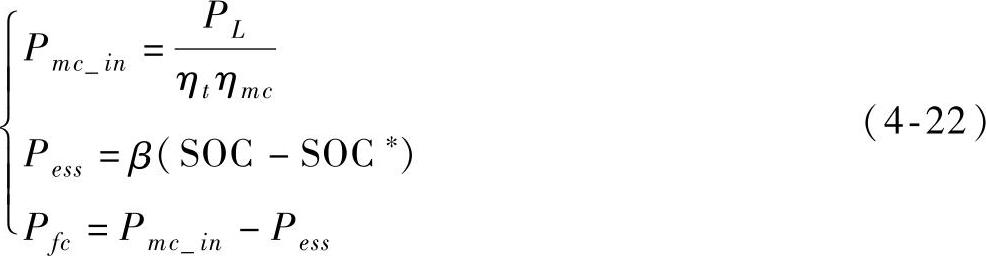
(3)混合驱动模式 当电池组荷电状态值高于期望值时,为控制电池的电量始终在理想值附近,电池组对外放电提供功率,剩余不足的功率由发动机来输出。电池组放电功率的大小由电池组荷电状态的当前值与期望值之间的差值来决定,其存在如下功率平衡关系:
(4)再生制动模式 当车辆减速或下坡时,发动机停止工作,发动机离合器分离,电动机工作于再生制动状态,此时系统存在如下功率平衡关系:

式中,α为车辆再生制动百分比,取值与具体的车辆驱动形式和当前汽车的车速有关。此时,Pmc_in为电机工作于发电状态时的输出功率。
(5)混合制动模式 当车辆急减速或急制动时,由于车辆制动负载功率较大,超出了电动机再生制动功率的上限,为限制电池组输入功率使电池组以浅循环模式工作,这时传统的摩擦制动器参与工作,与电动机再生制动协同提供车辆的制动功率需求,此时系统功率传送存在以下平衡关系:
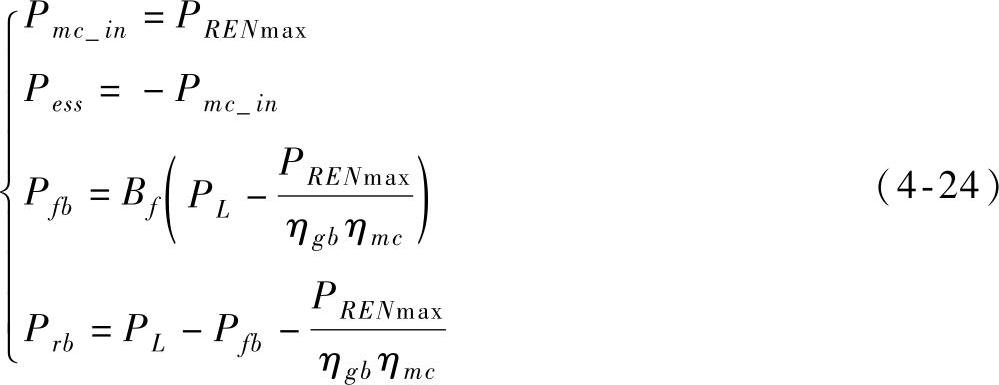
式中,Pfb为前轮摩擦制动器制动功率;Prb为后轮摩擦制动器制动功率; 为电动机最大再生制动功率;Bf为前轮摩擦力系数。
为电动机最大再生制动功率;Bf为前轮摩擦力系数。
图4-30所示为ADVISOR仿真软件功率跟随控制策略的Simulink模型,从图中可以看出,发动机状态是电池组SOC的函数,功率跟随控制策略中采用SOC修正发动机的功率需求。首先估算需求的发动机输出功率,以满足车辆驱动要求。同时,为使蓄电池SOC始终保持在其限定区间的中间位置,即蓄电池SOC值为(cs_lo_soc+cs_hi_soc)/2,需要附加电池修正因子cs_charge_pwr*fc_spd_scale*fc_trq_scale*((cs_lo_soc+cs_hi_soc)/2-SOC)。
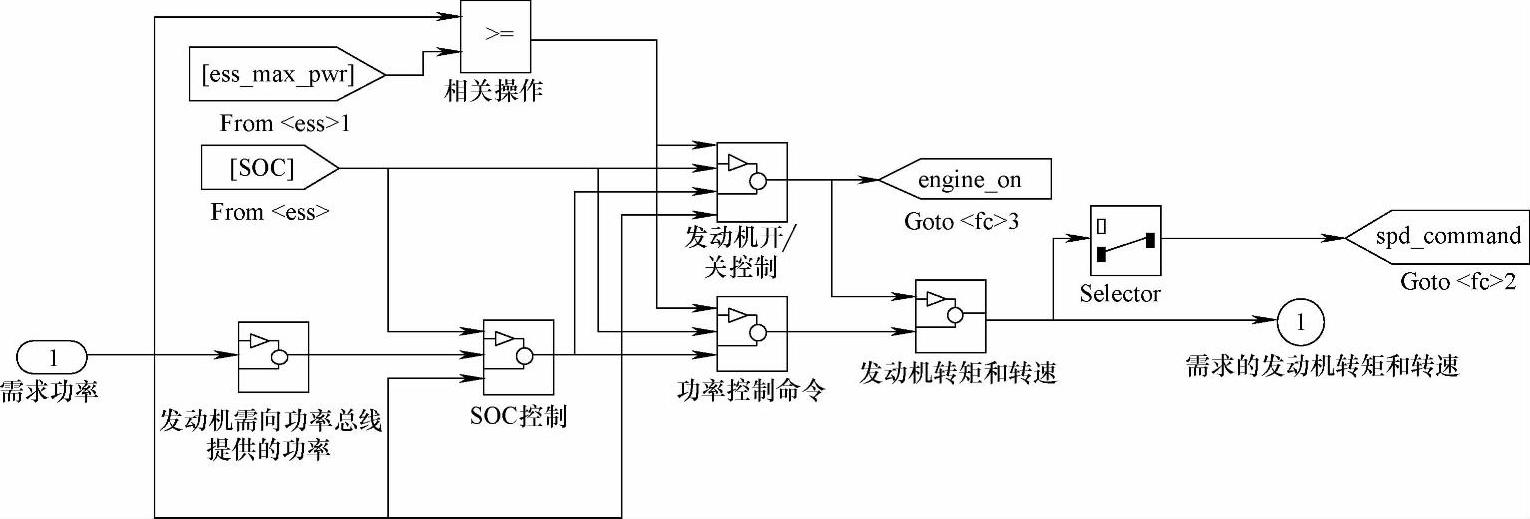
图4-30 ADVISOR功率跟随控制策略模块
功率跟随控制策略模块主要有发动机开/关控制子模块、蓄电池SOC控制子模块以及发动机转速和转矩计算子模块构成。下边分别对这几个模块进行简要分析。
图4-31所示为发动机开/关控制子模块。从图中可以看出该模块有四个输入:电池不提供路面功率要求时的逻辑变量、电池的SOC值、经电池的SOC修正后的发动机功率和路面需求功率。在这四个变量中,决定发动机开或关的主要变量是电池的SOC值和修正后的发动机功率,另外为了控制发动机还有一个重要的变量就是发动机前一工作状态量。
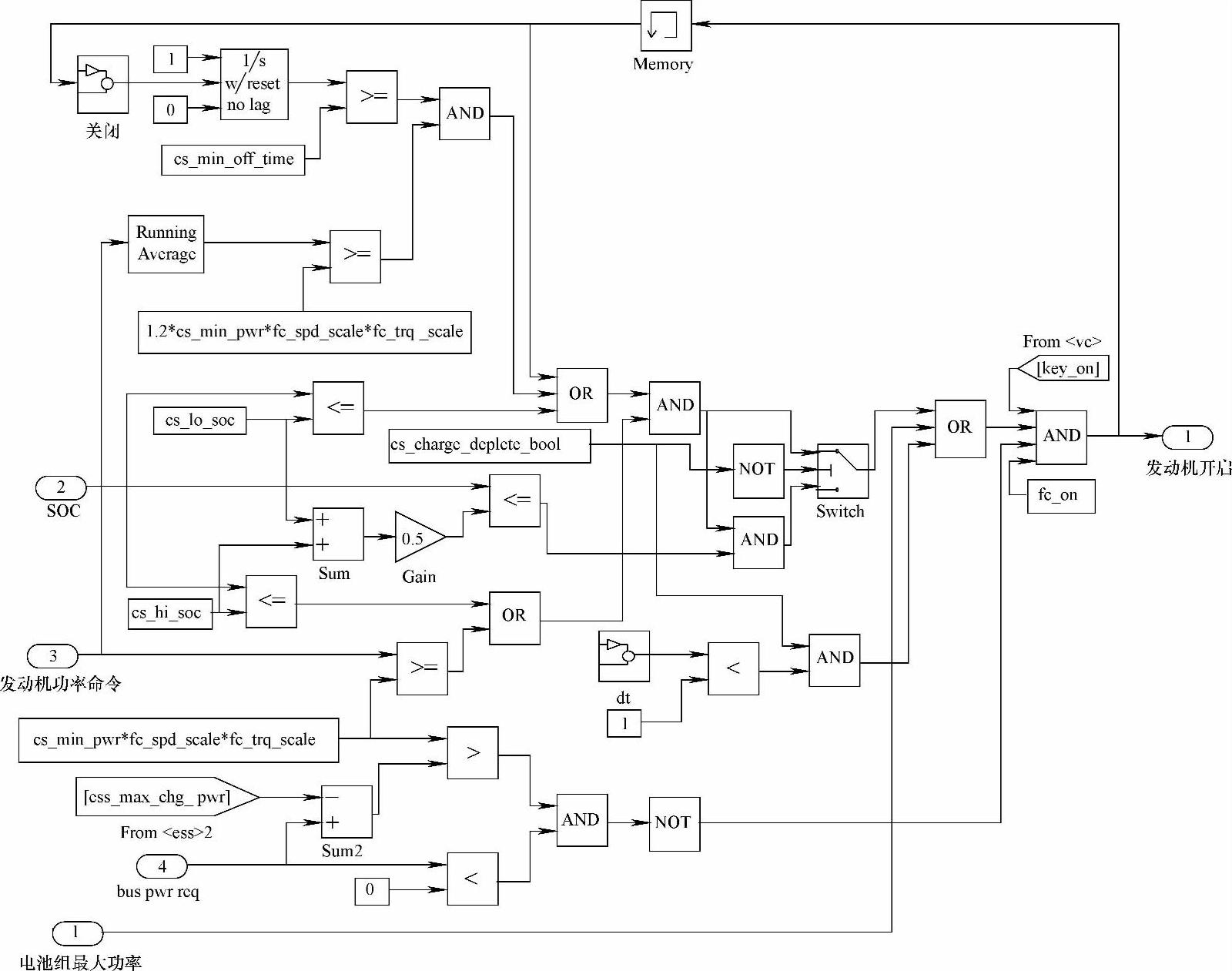
图4-31 发动机开/关控制子模块
图4-32所示为蓄电池SOC控制子模块,其主要功能是使蓄电池SOC值维持在上下限的平均值,即SOC=(cs_lo_soc+cs_hi_soc)/2,此时发动机需要额外提供附加功率Pex,其表达式为

图4-33所示为发动机转速和转矩计算子模块。该模块根据发动机最佳工作点的功率得出发动机的工作转矩和转速,使发动机在最佳状态下工作。根据发动机的万有特性图得出发动机最佳工作点时的功率对应的转速,将其存入cs_pwr和cs_spd两向量组中,构成一维表,由功率查找出最佳工作点的转速,然后由功率和转速计算发动机的输出转矩,最终输出优化后的发动机转矩和转速。
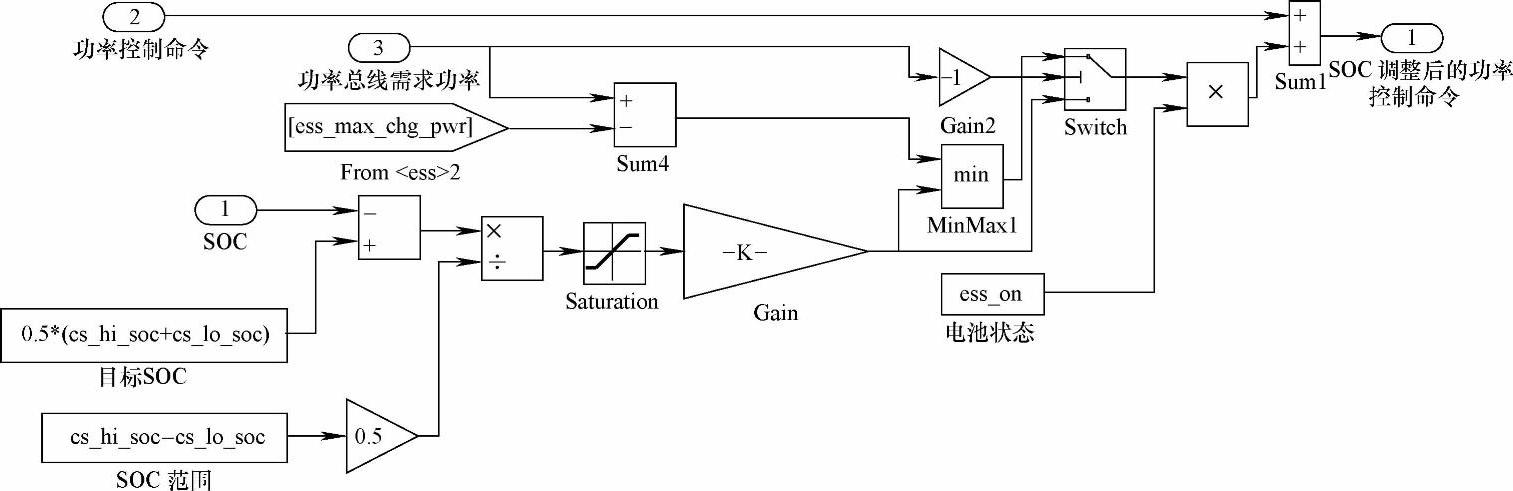
图4-32 蓄电池SOC控制子模块
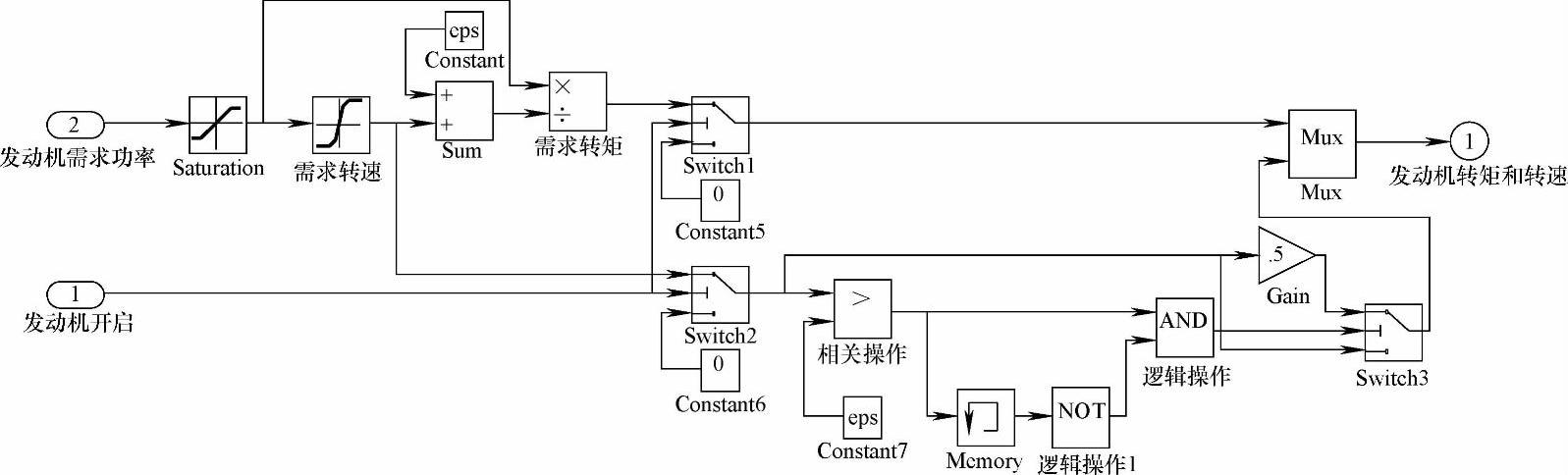
图4-33 发动机转速和转矩计算子模块
ADVISOR中串联式混合动力汽车功率跟随控制策略模块对应的M文件是“\ADVISOR2002\data\control”文件夹中的PTC_SER.m,建模过程中需新建对应功率跟随控制策略的M文件或在已有基础上修改其控制参数进行二次开发。该模块中需要定义的部分参数如下:(https://www.xing528.com)
电池SOC最高值:cs_hi_soc=0.8。
电池SOC最低值:cs_lo_soc=0.4。
发动机初始状态参数(1为发动机工作,0为发动机关闭):cs_fc_init_state=0。
发动机工作功率的最小值(kW):cs_min_pwr=max(fc_max_trq.*fc_map_spd)*.5。
发动机工作功率的最大值(kW):cs_max_pwr=max(fc_max_trq.*fc_map_spd)*.5。
电池充电功率(kW):cs_charge_pwr=0。
发动机关闭允许的最小时间(s):cs_min_off_time=inf。
发动机功率最快上升率(该值大于0):cs_max_pwr_rise_rate=0。
发动机功率最快下降率(该值小于0):cs_max_pwr_fall_rate=0。
2.电辅助控制策略
并联电辅助控制策略是在对发动机的性能和各部件的效率进行分析的基础上而提炼出来的。首先根据驾驶员指令(加速踏板和制动踏板开度)求得系统对功率的需求,根据功率需求,由整车控制器决定混合动力系统中的能量流,然后根据车速、负载和电池荷电状态来划分发动机的运行区域以及电机的运行状态。
一般情况下,并联电辅助控制策略是以发动机作为主动力源,电机和电池提供峰值功率。这样可以比较容易对发动机的运行工况进行优化。与发动机相比,电机响应快,控制灵敏,容易实现。这种控制策略相对来说比较简单实用,在并联式混合动力电动汽车中应用较为广泛[19]。
电辅助控制策略主要控制思想是将动力总成系统中的电机作为灵活变化的被控部件,利用电力系统反应迅速、控制准确的特点,在电动汽车行驶过程中,随工况需求变化配合发动机进行电机实时调控,使动力总成的能量输出在满足汽车动力学要求的同时,确保动力电池组SOC维持在合理的范围内,并使整车获得良好的燃油经济性和排放特性。图4-34所示为不同电池荷电状态下发动机、电机之间协调工作的逻辑关系,其中CSOC表示当前实际荷电状态值(%),HSOC与LSOC分别为荷电状态上下限。
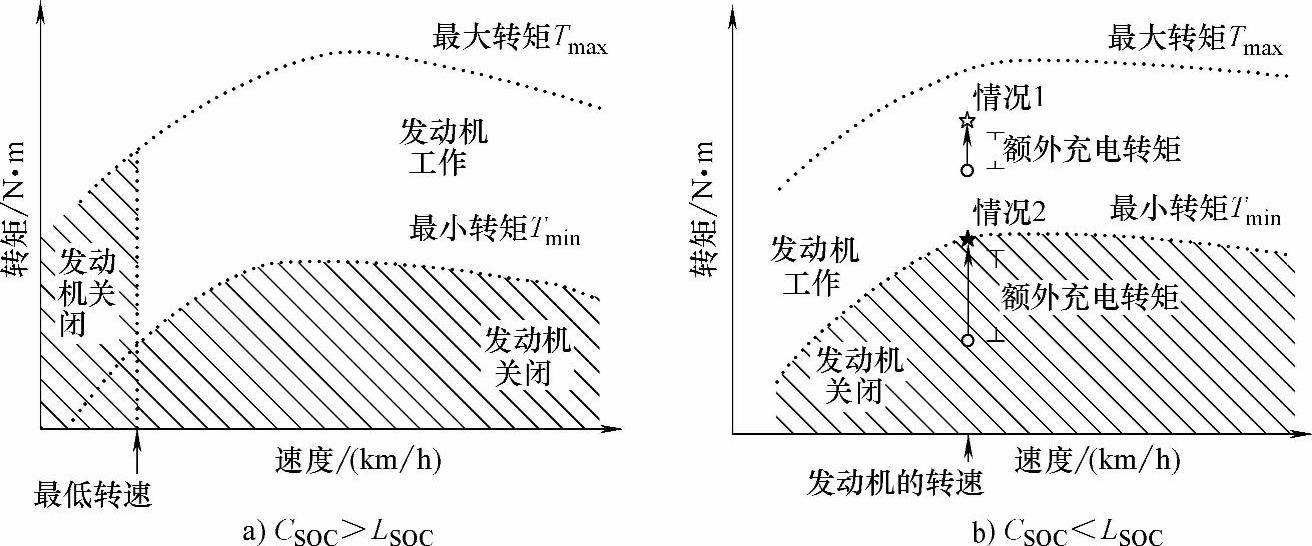
图4-34 电辅助控制策略逻辑图
当CSOC>LSOC时,电力驱动系统作为辅助动力源,对发动机的输出转矩起到“削峰填谷”的作用,其控制逻辑如图4-34a所示。图中,Tmax与Tmin分别为发动机最大转矩和最小转矩,在电辅助控制策略中,它们存在如下关系:

式中,cs_off_trq_frac为电辅助控制策略中发动机关闭转矩系数。
1)当汽车速度低于设定的最小车速时,发动机关闭,由电机提供全部驱动力.其中最小车速被定义为电池SOC的参数,以保持电池电量平衡.
2)当汽车速度高于设定的最小车速,所需转矩小于Tmin时,发动机关闭,电动机单独提供驱动力.
3)当汽车速度高于设定的最小车速,所需转矩在Tmin和Tmax之间时,发动机单独驱动混合动力汽车前进.
4)当汽车速度高于设定的最小车速,并且所需转矩大于Tmax时,由发动机和电动机共同为车辆提供驱动力.
当CSOC<LSOC时,为了保持电池的正常工作,发动机通过电机发电为其充电.此时,发动机的输出转矩不仅要满足车辆行驶需求,还需提供额外的充电转矩为电池充电.
1)对于第1种情况,如果驱动需求转矩在发动机最小与最大转矩之间,蓄电池充电需要一个额外的充电转矩,它与[0.5(HSOC-LSOC)-CSOC]成正比.
2)对于第2种情况,如果驱动需求转矩小于发动机最小转矩,那么发动机工作在最小转矩.
ADVISOR仿真软件中,电辅助控制策略的Simulink模型如图4-35所示.由图可知,电辅助控制策略模块根据驱动条件,即离合器需要的转矩和转速,经过蓄电池需求充电转矩子模块、最小转矩判断子模块,得到最佳值,在发动机开启信号的前提下,转矩与速度合成传递到发动机模块中.
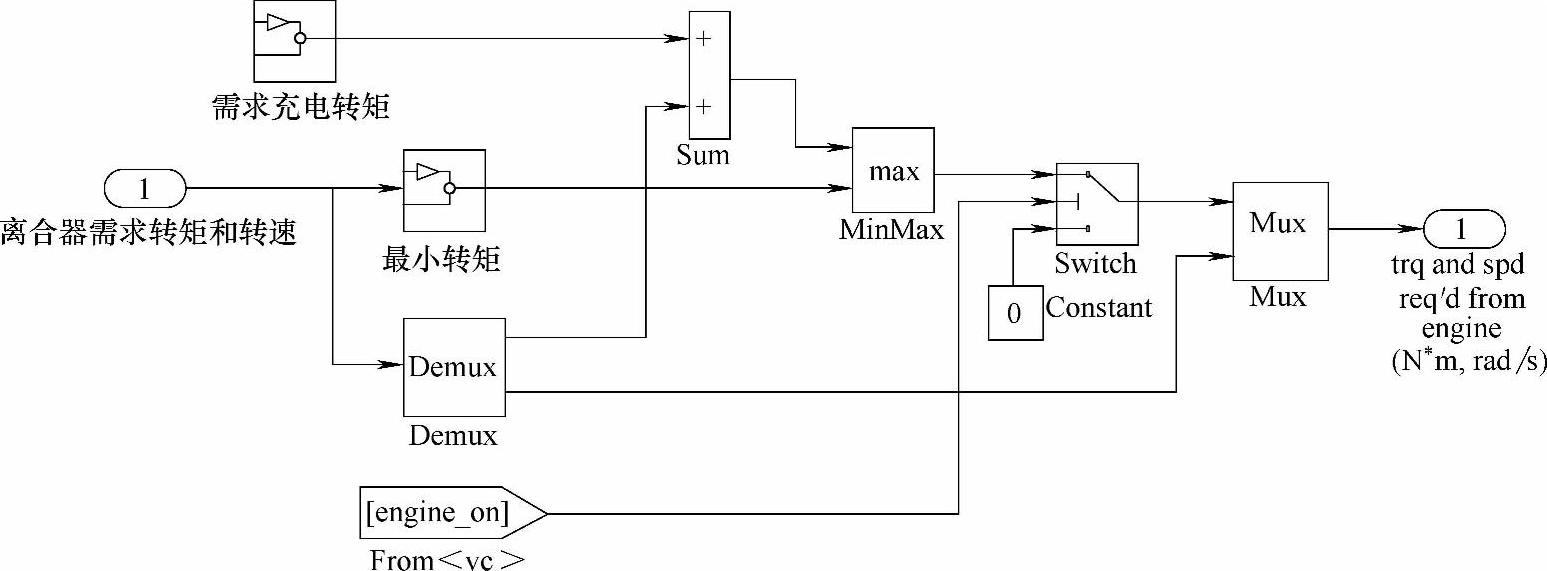
图4-35 ADVISOR电辅助控制策略模块图
最小转矩判断子模块如图4-36所示.该模块通过选择器获得当前发动机的需求转速,通过三维MAP得到该转速下发动机的最大转矩,经增益系数cs_min_trq_frac,计算出所需的最小转矩,并在蓄电池SOC小于期望值的前提下输出,否则为零输出.通过最小转矩判断子模块的限制,防止发动机在效率较低的区域工作.
蓄电池需求充电转矩子模块如图4-37所示.该子模块的作用是当蓄电池SOC低于门限时,计算由发动机给电池充电的转矩,这一附加充电转矩与[0.5(HSOC-LSOC)-CSOC成正比,以此来保证蓄电池SOC控制在适当的范围内,不被过度充放电,拥有较高的使用效率和较长的使用寿命。

图4-36 最小转矩判断子模块
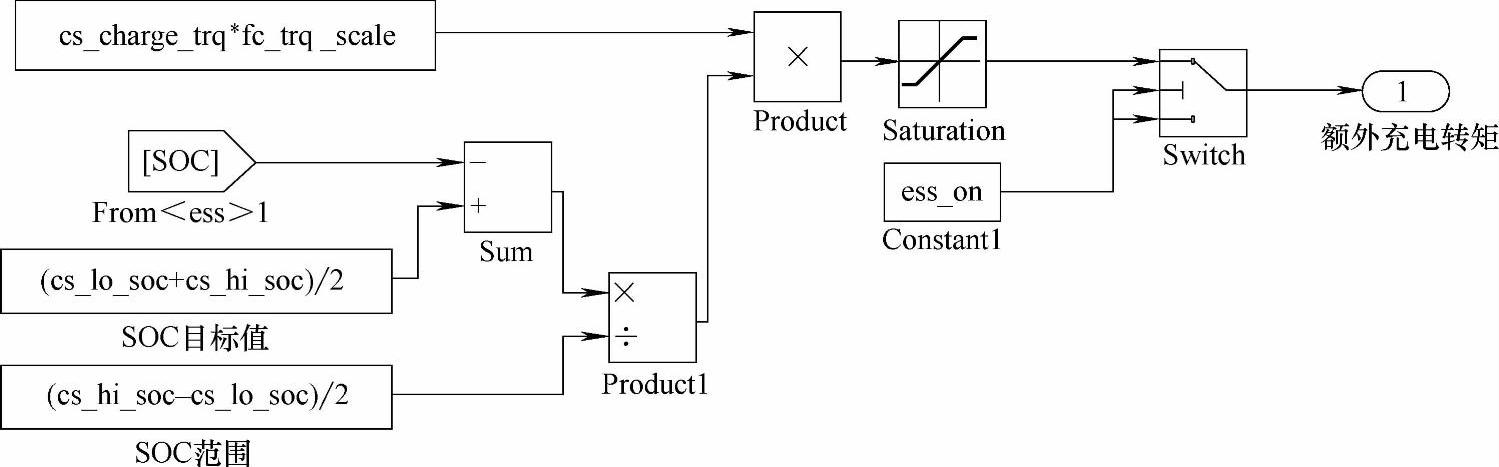
图4-37 蓄电池需求充电转矩修正子模块
ADVISOR中并联式混合动力汽车电辅助控制策略模块对应的M文件为“\ADVISOR2002\data\control”文件夹中的PTC_PAR.m,建模过程中需新建对应电辅助控制策略的M文件或在已有基础上修改其控制参数进行二次开发。该模块中需要定义的部分参数如下:
电池SOC最高值:cs_hi_soc=0.8。
电池SOC最低值:cs_lo_soc=0.3。
车速限值(低SOC时),低于此车速,车辆纯电动行驶(m/s):cs_electric_lauch_spd_lo=5。
车速限值(高SOC时),低于此车速,车辆纯电动行驶(m/s):cs_electric_lauch_spd_hi=7。
发动机关闭转矩系数:cs_off_trq_frac=0.1。
发动机最低工作转矩系数:cs_min_trq_frac=0.5。
电池充电转矩(N·m):cs_charge_trq=20。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。