



车轮模块用以连接整车行驶模块和主减速器模块。车轮滑移率是建立车轮模型所应该主要考虑的,车轮模块的输出转速、车轮滑移率及输出转矩可由下式计算:
式中,ωwh为车轮输出转速;u为车轮中心线速度;r为车轮半径;s为车轮滑移率;Tout为车轮模块输出转矩;Ttq为车轮与地面之间的转矩;Tiw为车轮惯性阻力矩;Iw为车轮转动惯量。
车轮模块将来自整车行驶模块的需求驱动力和需求行驶速度转换成需求转矩和需求转速传递给主减速器模块,并在前向仿真检验中根据主减速器模块传来的实际驱动转矩和实际转速计算轮胎模块上的牵引力以及行驶速度,传递给汽车整车行驶模块。图4-21为ADVISOR中车轮仿真模块图。
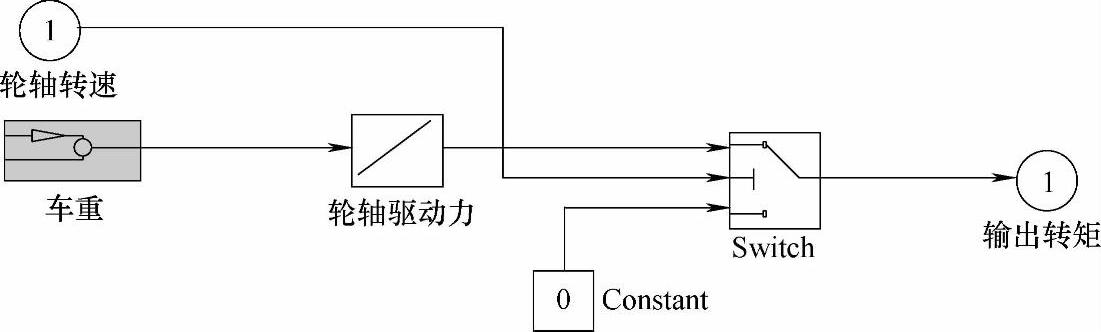
由滑动模型计算得到的车轮转速一方面传递给下一级模块,另一方面传递给损失计算模块和惯性转矩计算模块,它们的结构分别如图4-22、图4-23所示。
在车轮损失计算模块,由轮轴转速及车重计算传动轴的力矩损失,当传动轴不转动时,力矩损失为零。
在惯性力矩求解子模块中,由轮轴输入转速对时间求导,获得转速的加速度,通过与车轮转动惯量的乘积,得到车轮的惯性转矩。
车轮模块同样包含后向通道和前向通道,在车辆控制模块的控制下实现计算功能。后向通道中,首先将整车模块传递来的牵引力和车速要求传递给牵引力控制模块,由控制模块读取传递回来的限制后的牵引力和车速,然后将数据传递给轮胎滑转模型,其主要结构如图4-24所示。滑转模型在考虑轮胎打滑的情况下完成请求车速时需要的车轮驱动转速。
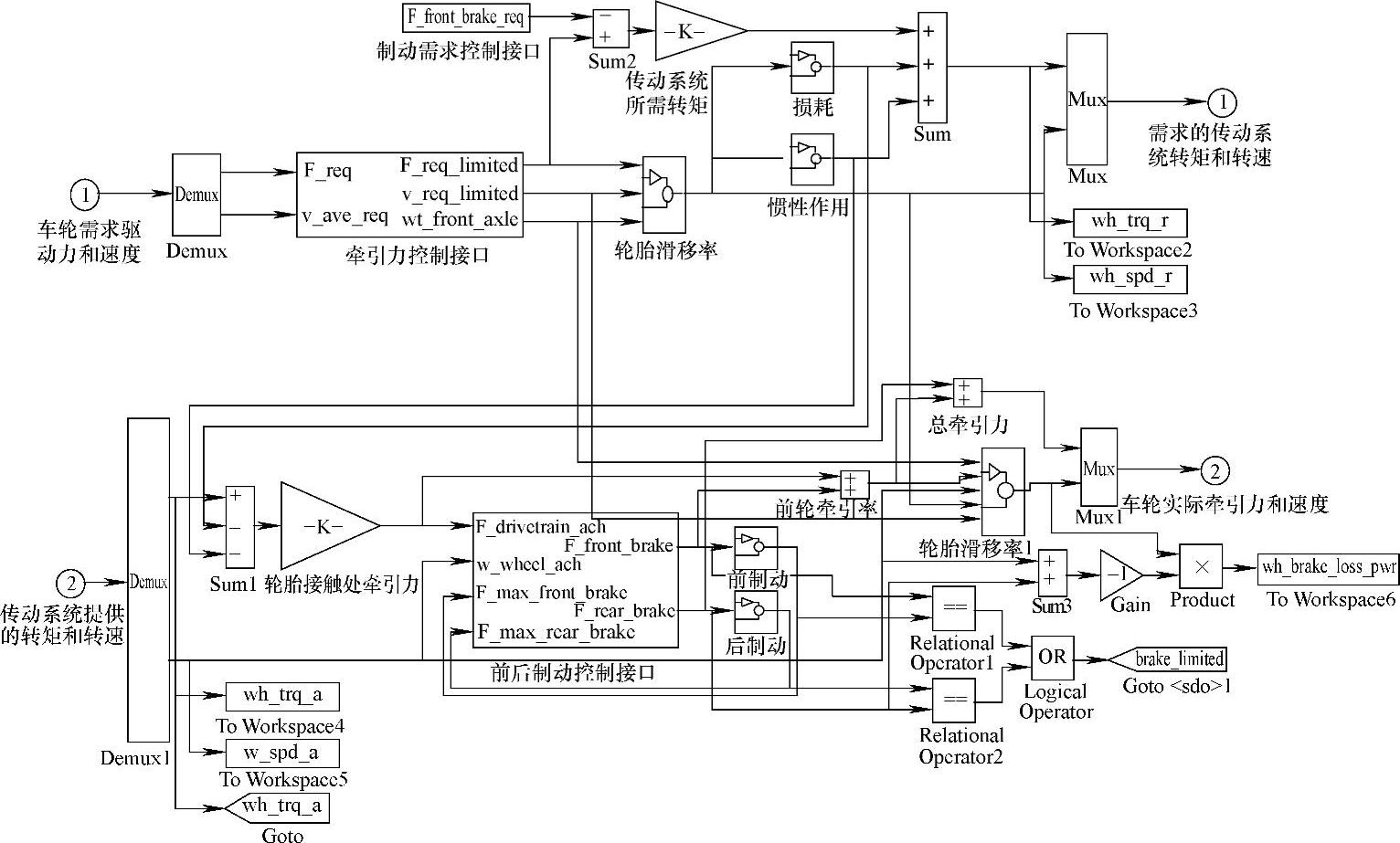
图4-21 ADVISOR车轮仿真模块图
 (https://www.xing528.com)
(https://www.xing528.com)
图4-22 车轮损失计算模块
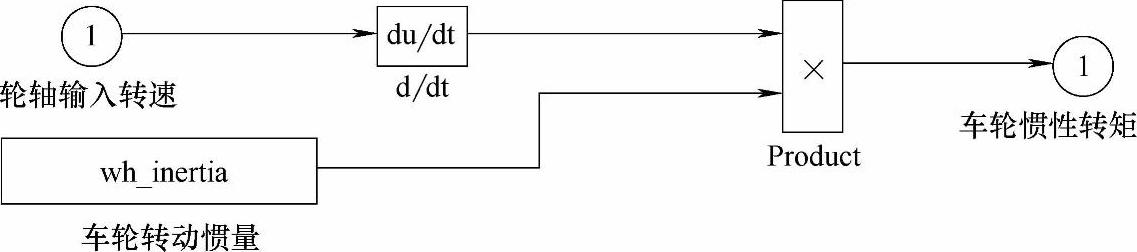
图4-23 车轮惯性转矩计算模块
前向仿真通道中,轴的损失以及惯性力矩值直接应用后向通道中的计算结果,反向计算(相对后向通道而言)。需要说明的是,由于实际实现的牵引力和转速可能不相等,导致轮胎的工作状态相应改变,因此需要重新计算打滑情况,在前向通道中,也设立一个滑转计算模块。
整车模块对应的M文件开头为“Wh”,保存在“\ADVISOR2002\data\wheel”文件夹中,文件中存储了车辆测试质量数组、驱动轴损失力矩数组、轮胎附着系数数组、滑转率数组、轮胎最大附着力、车轮滚动半径、车轮质量、车轮转动惯量(M文件自动计算)、车轮滚阻系数等数据。建模过程中需新建对应车轮模块的M文件或在已有基础上修改车轮模块参数进行二次开发。车轮模块中需要定义的部分参数如下:
车轮滚动半径(m):wh_radius=0.385。
轮胎的转动惯量(kg·m2):wh_inertia=40*wh_radius^2/2。
轮胎的滚动阻力系数:wh_1st_rrc=0.009。
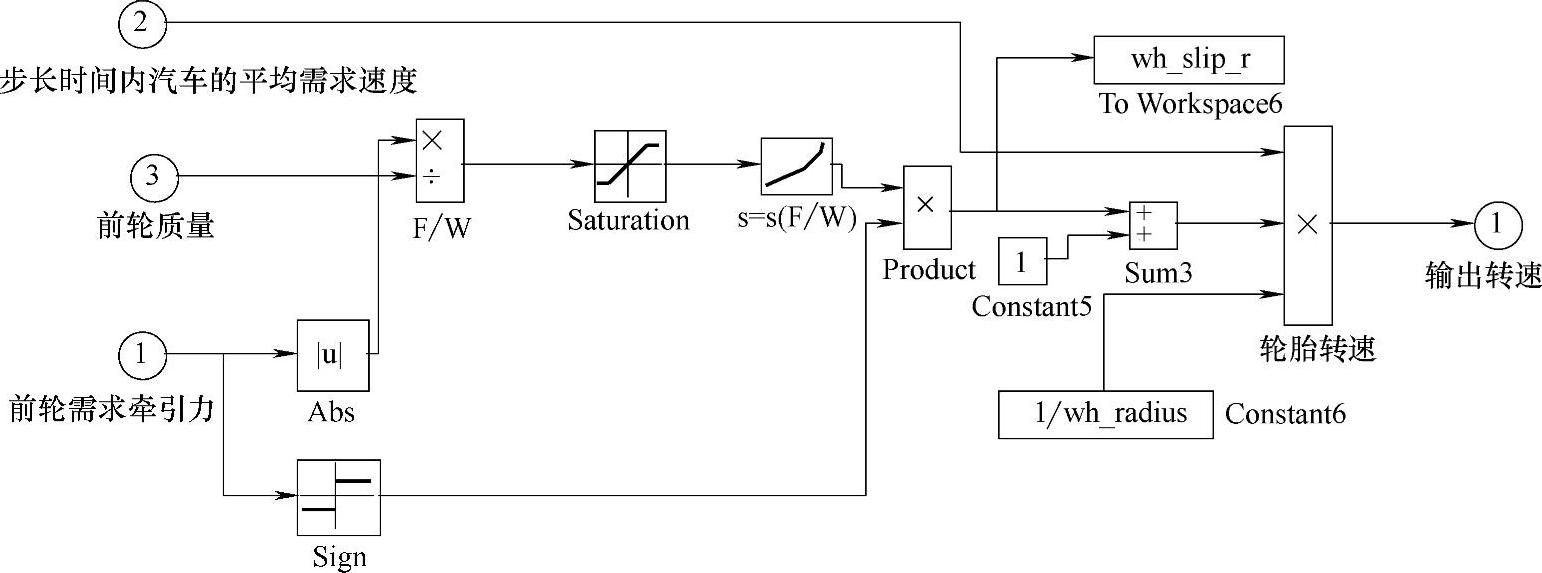
图4-24 车轮滑转模块
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。