



电动机的建模基础是电动机的电压、转矩、功率的平衡方程和运行特性方程。建模过程中要考虑电动机性能限制与电动机内的热变换,此外,还要考虑不同类型电动机所具有的特性。模型的正确性要看模型是否符合上述基本的数学关系,精确性则要看模型是否全面正确考虑到实物运行特性的影响因素。在ADVISOR仿真软件中要实现实物的仿真分析仅有模型是不够的,还要编制与其相配合运行的数据文件。电动机的数据文件定义了电动机各种工作过程状态下的转速、转矩、功率的MAP图以及电动机的性能参数,如最大电压、最大电流、质量及转动惯量等。在仿真分析运行过程中模型利用插值计算的方法,调用数据文件以实现电动机的工作过程仿真。电动机模型采用顺、逆序相结合计算方式。电动机模型的功能为:在建模对象电动机已知的情况下,根据电动机模型的需求转矩和需求转速,在一系列性能限制条件下通过计算得出电动机需求输入电功率和电动机的功率转矩特性。在顺序计算模型中,根据实际输入功率,在考虑电动机热交换影响的前提下计算出电动机实际输出转矩和实际输出转速。顺序计算模型的仿真步骤是:根据电动机模型的实际输入功率计算出实际输出转矩和实际输出转速,工作过程中输入电机的能量减去电机输出的能量约为电机产生的热能。逆序计算模型仿真步骤是:转化电机需求转矩和电机需求转速的要求为需求输入电功率的要求,通过一系列的性能限制,计算满足车辆运行性能要求的电动机运行性能。
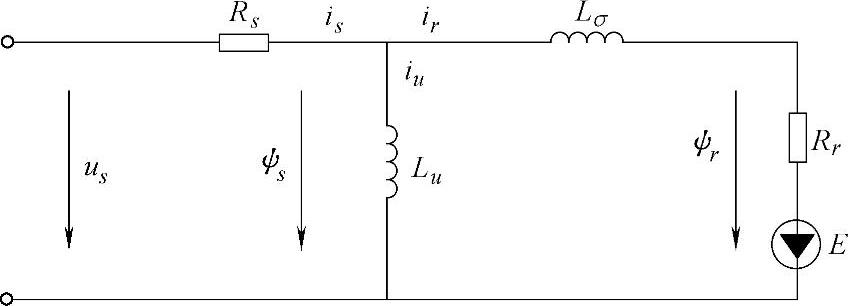
图4-10 交流电机空间矢量等效电路
ADVISOR中电动机模型为动力学模型,无须考虑其电磁特性。因此,电动机模型只需考虑其输入、输出,而不必考虑其内部的工作机制,即假定电机控制器/逆变器总能按需求控制电机以实现指定的输入量和输出量间的关系。驱动过程中,电机以电动机状态工作,电池或发动机/发电机组提供的电流经电机控制器送入电机,电机轴输出的转矩经传动系减速增扭后驱动整车。制动过程中,电机以发电机状态工作,车轮通过传动系带动发电机运转,将车辆制动时损耗的动能回收用于为电池充电。
ADVISOR中驱动电机模块的建模方法与发动机模块相同,建模过程中将驱动电机及其控制器作为一个整体,考虑它们的综合性能即驱动电机的输出特性[12]。图4-10所示为交流电机空间矢量等效电路。
图中,us为定子电压空间矢量;is为定子电流矢量;ir为转子电流矢量;iu为励磁电流矢量;Rr是单向转子电阻;Rs是单向定子电阻;ψs是定子磁链空间矢量;ψσ是漏磁链矢量;ψr是转子磁链空间矢量;ω为电角速度;E为转子反电势;Lσ为单向转子与定子漏感之和;Lu为单向励磁电感与定子漏感之和。
在α、β坐标系下,异步电动机的数学模型有如下表示:
1)电动机电压方程:
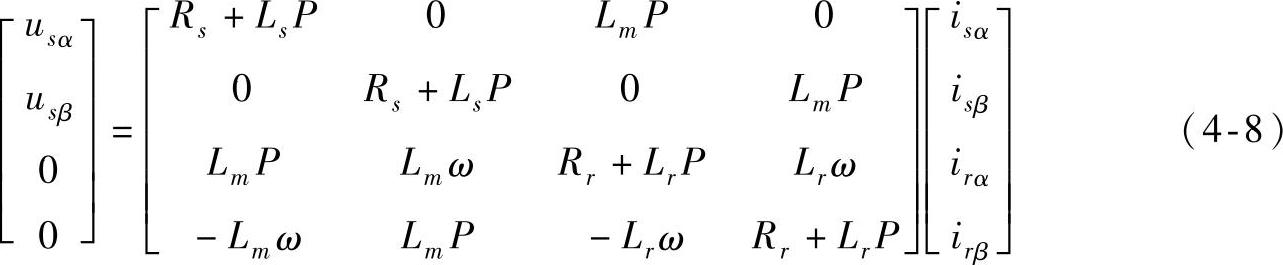
式中,usα为定子α轴电压;isα为定子α轴电流;usβ为定子β轴电压;isβ为定子β轴电流;irα为转子α轴电流分量;irβ为转子β轴电流分量;Lm为α、β坐标系下转子与定子之间绕组互感;Rs为定子在α、β坐标系下绕组的电阻;Ls为定子在α、β坐标系下绕组的电感;Rr为转子在α、β坐标系下绕组的电阻;Lr为转子在α、β坐标系下绕组的电感;P为微分算子。
2)电动机磁链方程:
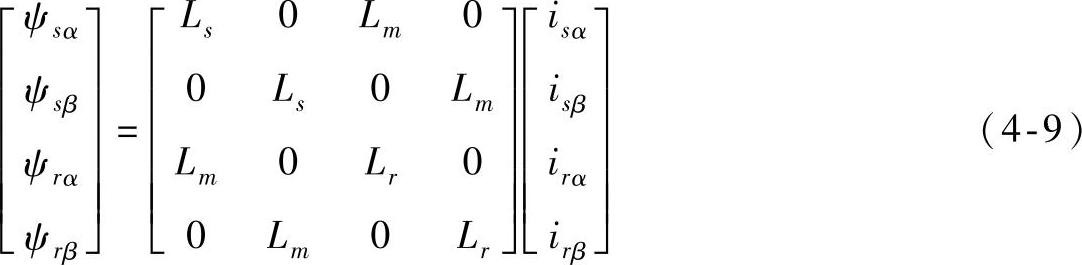
式中,ψsα为定子α轴的磁链;ψsβ为定子β轴的磁链;ψrα为转子α轴的磁链;ψrβ为转子β轴的磁链。
3)电子转矩方程:(https://www.xing528.com)

式中,np为电机的极对数;θ为转子磁链与定子磁链的夹角。
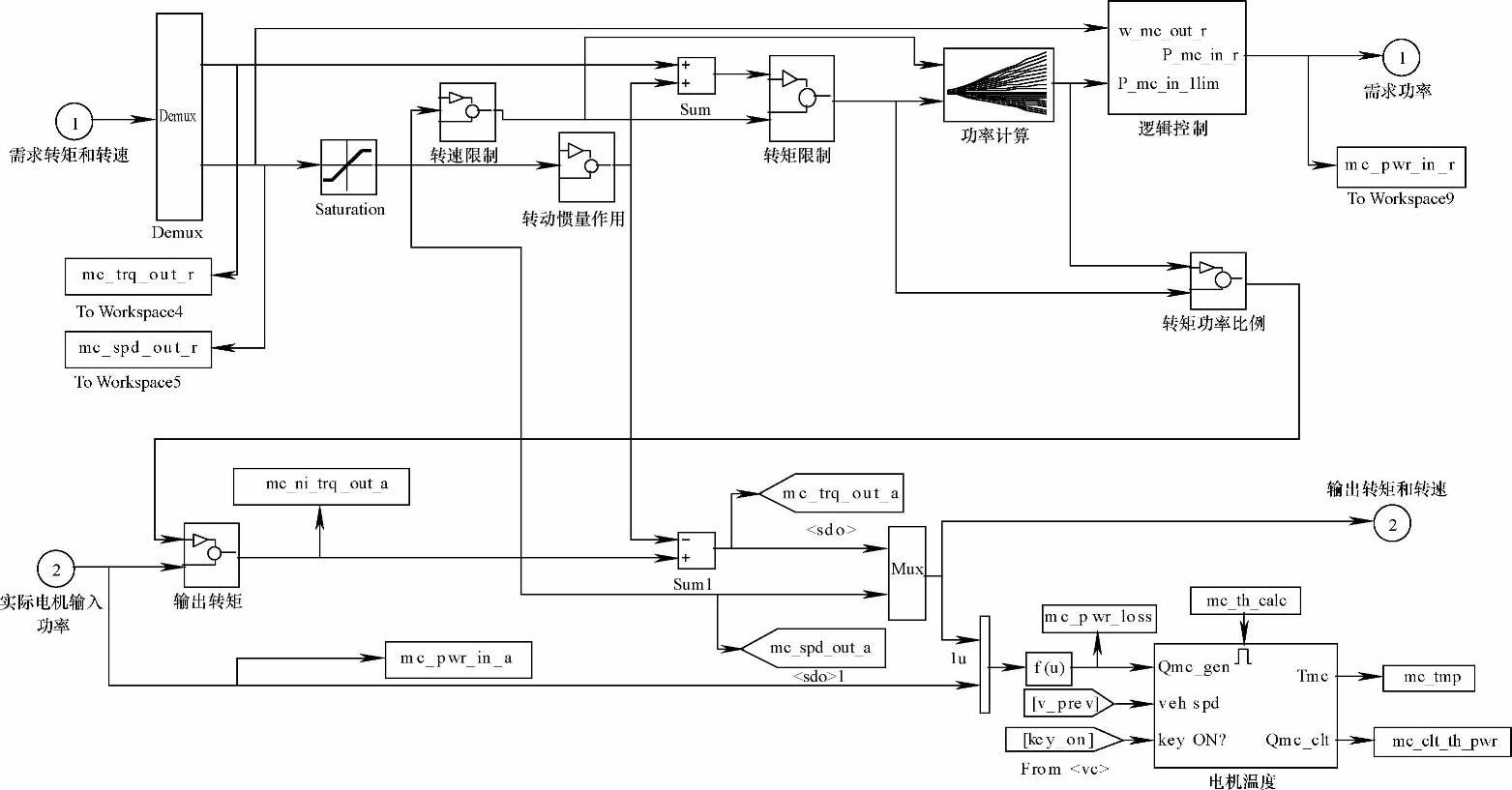
图4-11 ADVISOR驱动电机仿真模块图
在ADVISOR中驱动电机模型如图4-11所示。驱动电机模块在后向仿真路径中把转矩耦合装置传递的需求转矩和需求转速转换成需求电功率,并且在前向仿真路径中把实际输入电功率转换成实际输出转矩和输出转速,主要由电机转速限制模块、转矩限制子模块、转动惯量作用子模块、功率计算子模块和控制器逻辑控制子模块等组成。
ADVISOR驱动电机模块对应的M文件位于"\ADVISOR2002\data\motor"文件夹中,建模过程中需新建对应驱动电机的M文件或在已有基础上修改驱动电机转速范围、转矩范围、效率矩阵等参数进行二次开发。驱动电机模块中需要定义的部分参数如下:
驱动电机的转速范围(rad/s):mc_map_spd=[0,400,800,1200,1600,2000,2400,2800,3200,3600,4000,4400,4800,5200,5600,6000]。
驱动电机的转矩范围(N·m):mc_map_trq=[-239.0,-221.0,-190.3,-172.7,-159.2,-145.6,-132.0,-118.5,-99.9,-89.4,-77.8,-64.2,-49.7,-34.1,-19.6,0.0,19.6,34.1,49.7,64.2,77.8,89.4,99.9,118.5,132.0,145.6,159.2,172.7,190.3,221.0,239.0]。
驱动电机不同转速下的最大转矩(N·m):mc_maX_trq=[239,239,239,239,239,239,239,239,239,239,214.9,195.3,179.04,165.3,153.5,143.235]。
驱动电机的最大电流(A):mc_maX_crrnt=385。
驱动电机的质量(kg):mc_mass=125。
驱动电机的最低工作电压(V):mc_min_volts=200。
驱动电机过载系数:mc_overtrq_factor=1.8。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。