



1.主要紧固件紧固规格
防抱死制动系统主要紧固件紧固规格见表9-13。
表9-13 主要螺栓紧固力矩 (单位:N·m)

2.防抱死制动系统电路图
防抱死制动系统电路图如图9-29~图9-31所示。
3.部件组成
防抱死制动系统的工作涉及以下部件:
1)电子制动控制模块(EBCM)。电子制动控制模块(EBCM)安装在制动压力调节阀总成上,如图9-32所示。EBCM控制系统功能并检测故障,从而向电磁阀和泵电动机提供电压。
2)制动压力调节阀总成。制动压力调节阀总成参见图9-30,包括包括以下部件:
①带泵电动机的液压泵。
②4个隔离阀。
③4个卸压阀。
④两个牵引力控制/稳定性控制电源阀。
⑤两个牵引力控制/稳定性控制隔离阀。
⑥压力传感器。
⑦高压衰减器。
⑧低压储能器。
3)多轴加速度传感器。横向偏摆率、横向加速计和纵向加速计传感器集成于一个多轴加速度传感器,在电子制动控制模块之外,其位置如图9-33所示。电子制动控制模块从横向偏摆率、横向加速计和纵向加速计传感器都接收到串行数据输入,根据多轴加速度传感器输入启动稳定性控制和坡道起步辅助功能。
4)转向盘位置传感器。转向盘位置传感器位于转向盘下面,如图9-34所示。电子制动控制模块接收来自转向盘位置传感器输入的串行数据信息。转向盘位置传感器信号用于计算期望的横向偏摆率。
5)牵引力控制开关。按下牵引力控制开关,手动停用或启用牵引力控制和稳定性控制。
6)车轮转速传感器。电子制动控制模块(EB-CM)给每个车轮转速传感器提供一个12V的参考电压,随着车轮旋转,车轮转速传感器产生交流电方波信号,EBCM使用此方波信号的频率来计算车轮转速。如图9-35所示,车轮转速传感器安装在转向节上,感应磁环与轴承是一体,车轮转速传感器可单独拆下并更换。
4.防抱死制动系统说明与操作
本车装备了TRW EBC450制动系统,电子制动控制模块(EBCM)和制动压力调节阀总成需单独维修。制动压力调节阀总成采用4路配置,分别控制每个车轮的液压。根据选项,提供以下车辆性能增强系统。
(1)防抱死制动系统(ABS)
当制动期间检测到车轮打滑时,防抱死制动系统启动。在防抱死制动系统制动期间,对各车轮油路中的油液压力加以控制,防止车轮打滑。各车轮配有独立的液压油路和特定的电磁阀。防抱死制动系统可降低、保持或提高各轮的油液压力。但是,防抱死制动系统未使油液压力超过总泵在制动期间所提供的压力。在防抱死系统工作期间,出现噪声和踏板脉动是正常的。
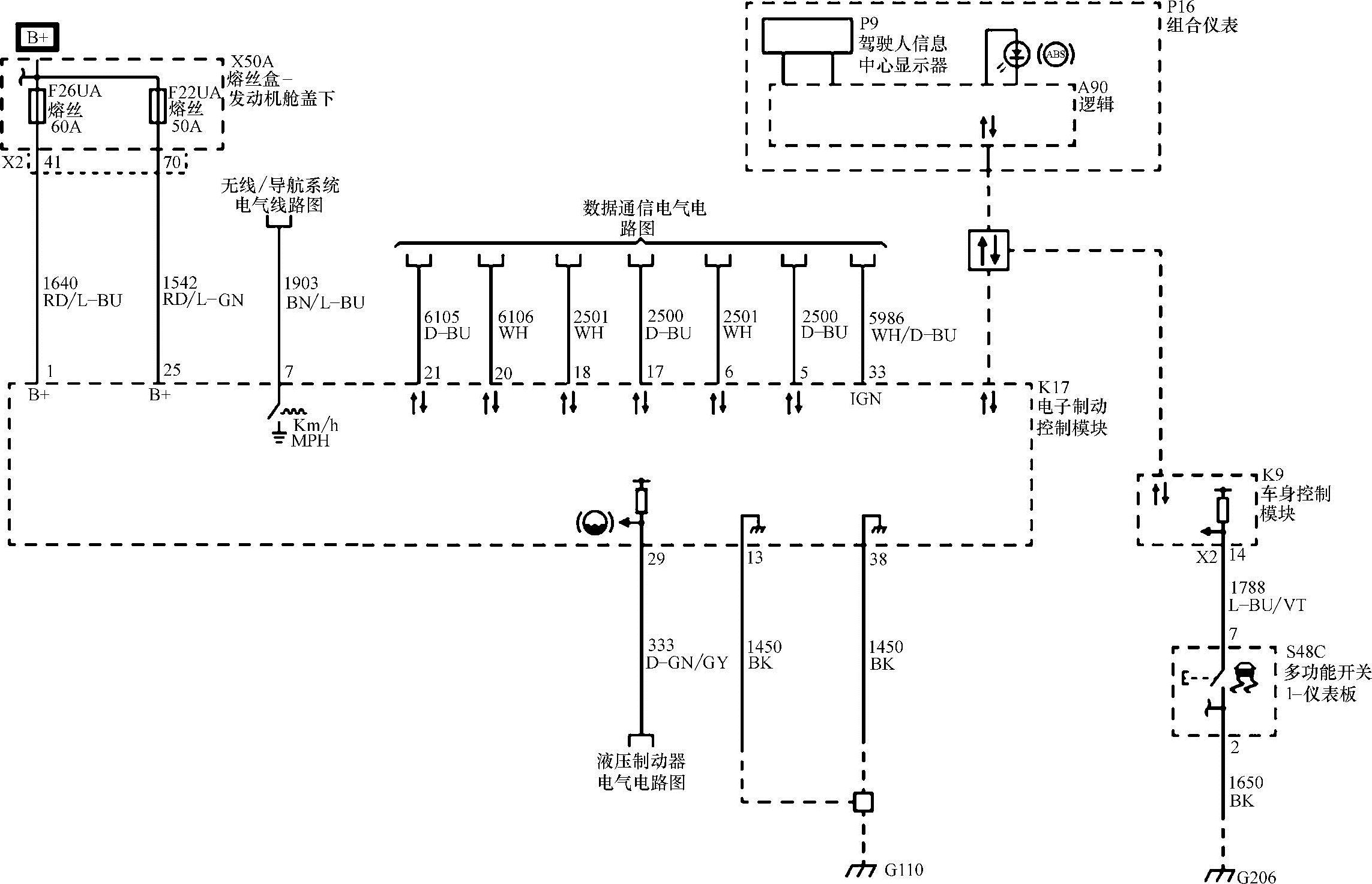
图9-29 防抱死制动系统电路图(一)
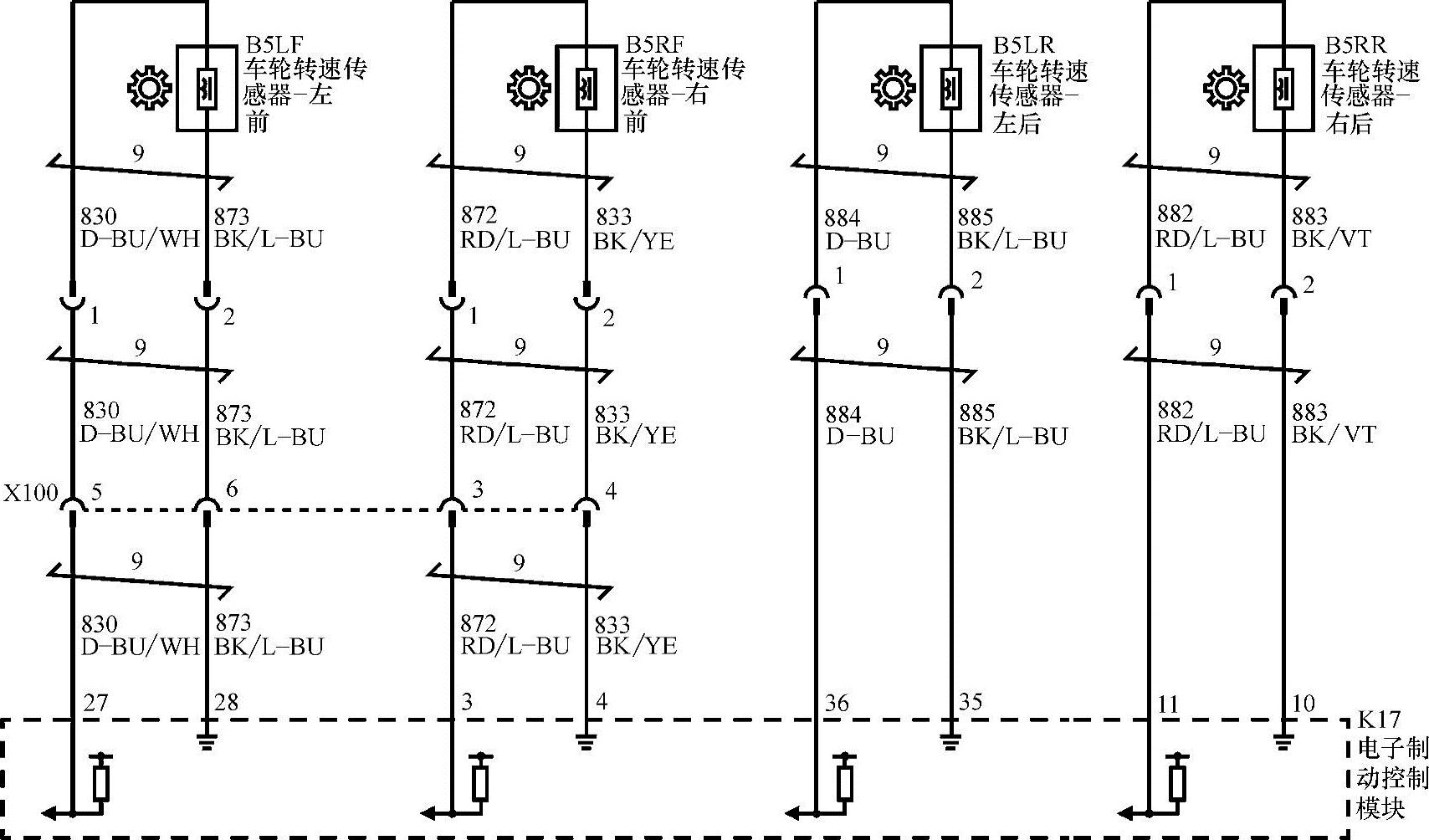
图9-30 防抱死制动系统电路图(二)
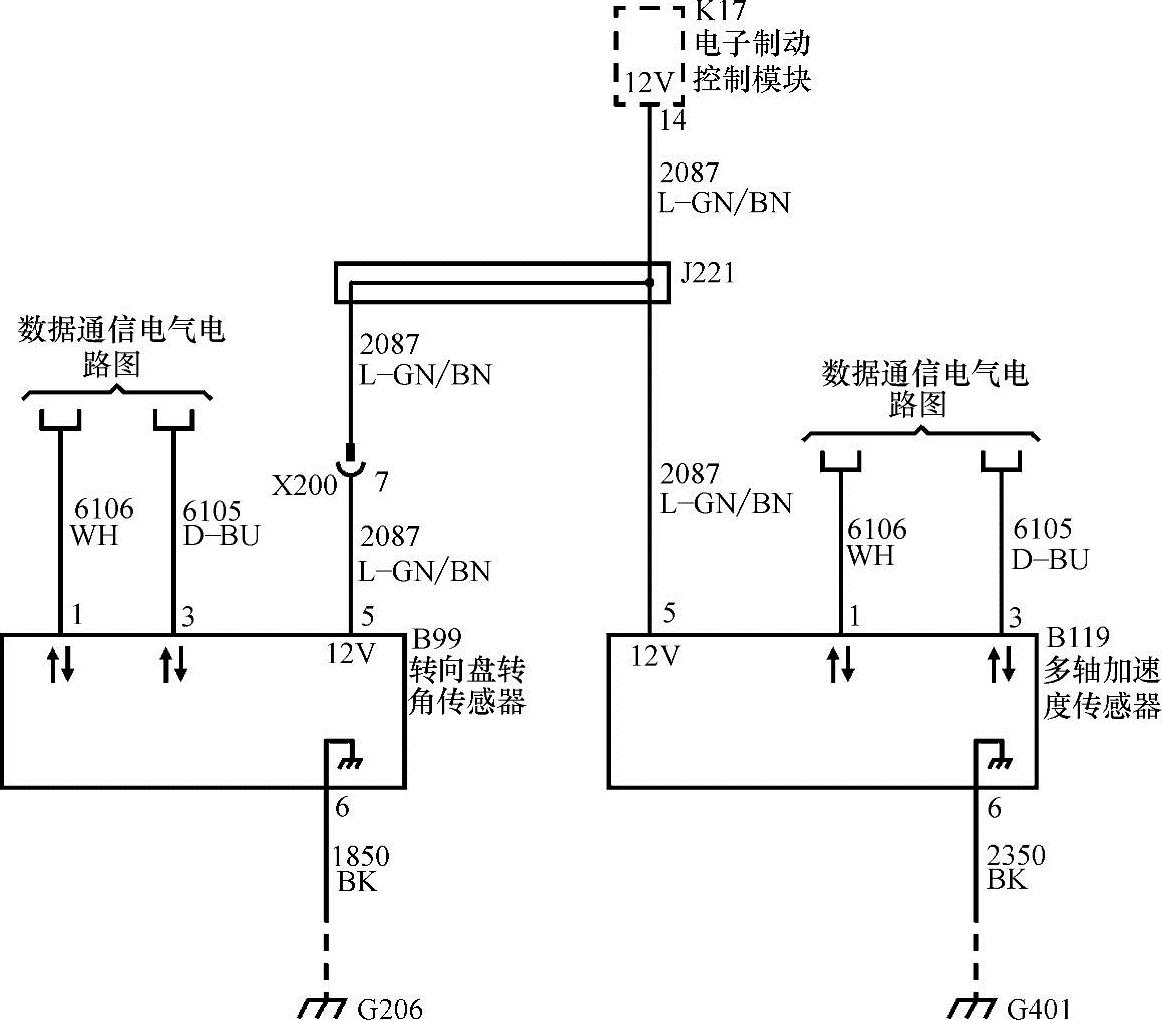
图9-31 防抱死制动系统电路图(三)
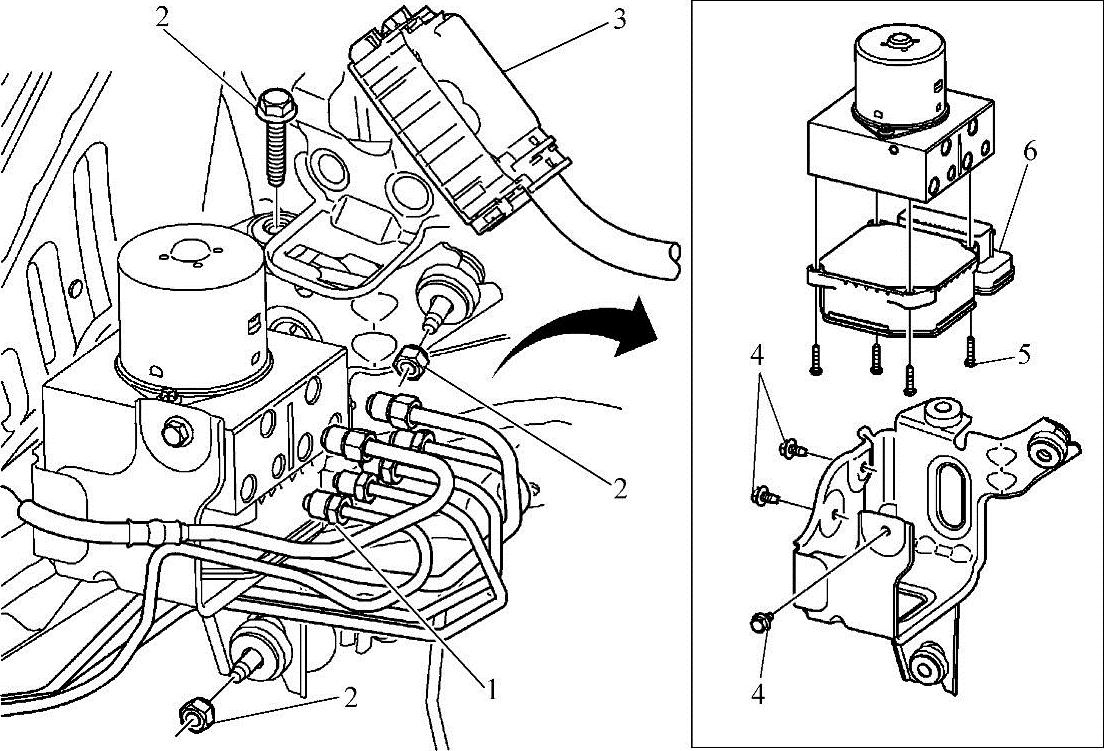
图9-32 电子制动控制模块及制动压力调节阀总成
1—制动管接头 2—紧固件 3—电气插接器 4—制动压力调节阀螺栓 5—电子制动控制模块螺栓 6—电子制动控制模块
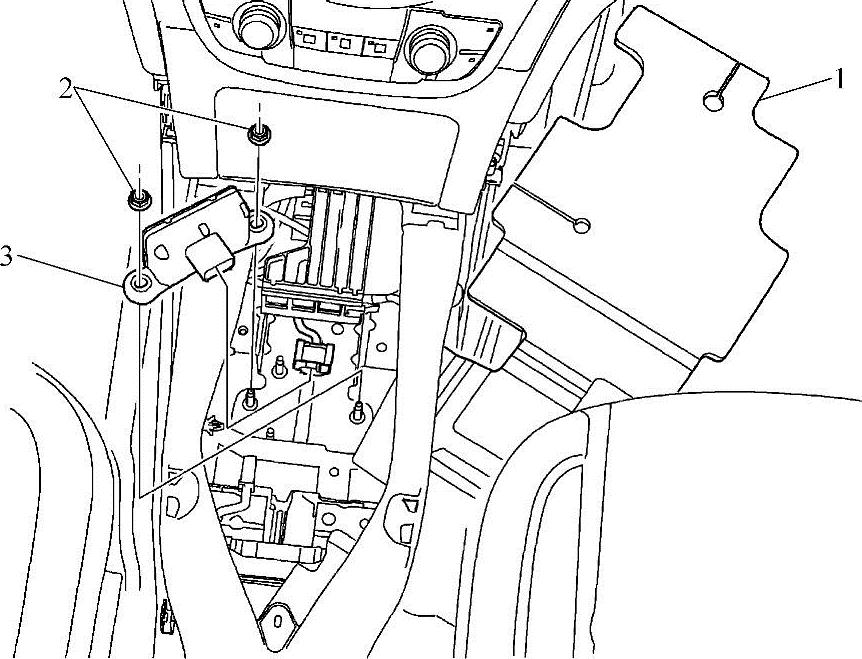
图9-33 多轴加速度传感器
1—前地板通道隔垫 2—螺母 3—横向偏摆率传感器
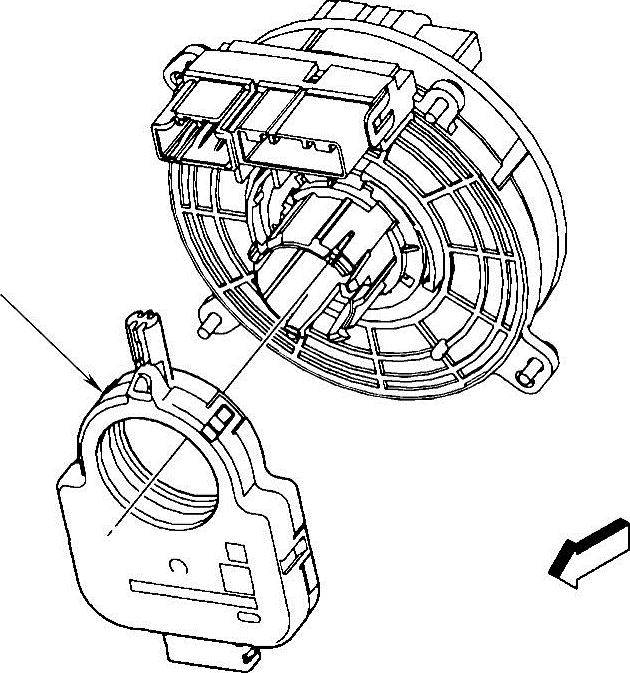
图9-34 转向盘位置传感器
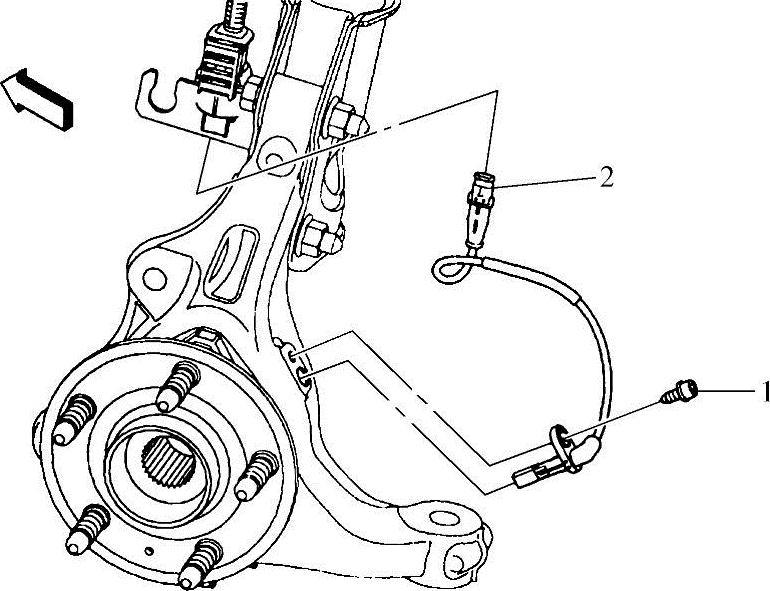
图9-35 车轮转速传感器
1—速度传感器螺栓 2—前轮转速传感器
(2)牵引力控制
当发现驱动轮滑移时,电子制动控制模块(EB-CM)将进入牵引力控制模式。首先,EBCM将通过串行数据信息,请求发动机控制模块(ECM)减小在驱动轮上的转矩。ECM减小在驱动轮上的转矩,报告向驱动轮输出的转矩。如果发动机转矩减小后,并没有减少驱动轮的滑移,则EBCM将主动对驱动轮进行制动。在牵引力控制制动期间,各驱动轮油路中的油液压力将受到控制,以防止驱动轮滑移。EBCM指令泵电动机和相应的电磁阀的通电和断电,以便向打滑车轮施加制动压力。牵引力控制可通过按下牵引力控制开关手动停用或启用。
(3)稳定性控制
猛烈操作车辆时,稳定性控制提供附加稳定性。横向偏摆率指绕车辆纵向轴线摆动的角速度。当电子制动控制模块确定期望的横向偏摆率与横向偏摆率传感器测量的实际横向偏摆率不符时,会启动稳定性控制系统。期望的横向偏摆率由电子制动控制模块使用以下输入来计算:(https://www.xing528.com)
①转向盘位置。
②车速。
③横向加速度。
理想横向偏摆率与实际横向偏摆率之差称为横向偏摆率误差,用于衡量转向过度或转向不足。当检测到横向偏摆率误差,电子制动控制模块会尝试对一个或多个车轮施加制动压力,以此对车辆横向偏摆运动进行校正。施加的制动压力值不同,由校正所需压力决定。如果有必要在维持车辆稳定时降低车速,那么发动机转矩也可能减小。
稳定性控制通常在行驶过猛时于转弯处启动。在稳定性控制启动中制动,制动踏板会产生脉动。稳定性控制可通过按下牵引力控制开关5秒钟手动停用或启用。
(4)动态后轮制动力分配
动态后轮制动力分配是一个控制系统,它取代了机械式比例阀。在一定的行驶条件下,电子制动控制模块(ECM)会通过指令相应的电磁阀通电和断电减少后轮制动压力。
(5)坡道起步辅助
驾驶人在将脚从制动踏板移到加速踏板时,坡道起步辅助允许驾驶人起动车辆,而不使车辆后退。当松开制动踏板时,电子制动控制模块计算将车辆保持在坡道上所需的制动压力,并通过指令相应的电磁阀通电和断电以锁定此压力一定时间。当电子制动控制模块确定驾驶人想驾驶车辆上坡,后退或者前进时,坡道起步辅助就会起动。以下输入用于坡道起步辅助功能:
①制动开关。
②制动压力。
③纵向加速度。
④发动机转矩。
⑤倒档信息。
⑥离合器开关。
⑦加速踏板位置。
⑧车速。
(6)转弯制动控制
转弯制动控制有滑移控制功能,在组合制动和拐角状态中用来提高车辆横向加速计/横向偏摆率稳定性。电子制动控制模块会通过指令相应的电磁阀通电和断电减少内侧车轮的制动压力。
(7)液压制动辅助
液压制动辅助功能用于紧急制动情况下辅助驾驶人。电子制动控制模块(ECM)接收来自制动液压力传感器的输入,当感测到紧急制动情况时,电子制动控制模块会主动增加制动压力至最大规定值。
(8)挂车稳定性辅助
挂车稳定性辅助系统会检测到任何由挂车连接引起的车辆横向偏摆率不稳定。当检测到不稳定时,电子制动控制模块会对一个或多个车轮施加制动压力,以此对车辆横向偏摆运动进行校正。如果有必要降低车速,那么发动机转矩也可能会减小。
5.驾驶人信息指示灯
(1)制动警告灯
发生以下情况时,组合仪表会点亮制动警告灯:
①组合仪表执行灯泡检查。
②电子制动控制模块检测到泵电动机和电磁阀故障、内部硬件故障或者电池电压过高或过低,并发送串行数据至组合仪表请求点亮指示灯。
③车身控制模块(BCM)检测到驻车制动器已接合。组合仪表接收到来自车身控制模块请求点亮指示灯的串行数据信息。
(2)防抱死制动系统指示灯
发生以下情况时,组合仪表会点亮防抱死制动系统指示灯:
①组合仪表执行灯泡检查。
②电子制动控制模块检测到防抱死制动系统停用故障时,发送串行数据信息至组合仪表请求点亮指示灯。
(3)牵引力控制/稳定性控制启用指示灯
当发生以下情况时,组合仪表会点亮牵引力控制/稳定性控制启用指示灯:
①组合仪表执行灯泡检查。
②防抱死制动系统处于牵引力控制或稳定性控制模式。
③电子制动控制模块检测到牵引力控制/稳定性控制禁用故障,发送串行数据信息至组合仪表请求点亮指示灯。
(4)牵引力控制停用指示灯
发生以下情况时,组合仪表会点亮牵引力控制停用指示灯:
①组合仪表执行灯泡检查。
②驾驶人按下牵引力控制开关,手动停用牵引力控制系统。电子制动控制模块向组合仪表发送串行数据信息,请求点亮指示灯。
(5)稳定性控制停用指示灯
发生以下情况时,组合仪表会点亮稳定性控制停用指示灯:
①组合仪表执行灯泡检查。
②驾驶人按下牵引力控制开关,手动停用稳定性控制系统。电子制动控制模块向组合仪表发送串行数据信息,请求点亮指示灯。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。