



不同转向特性汽车的运动学特性见图6-13、图6-14和图6-15所示。
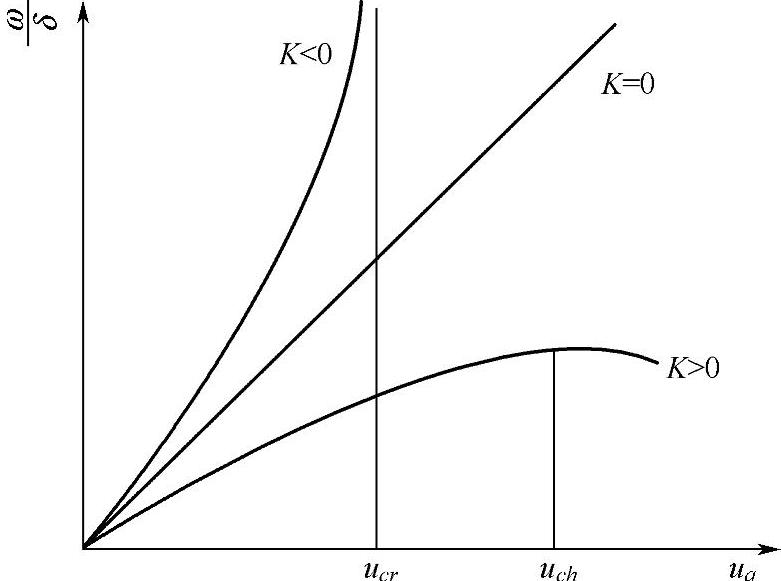
图6-14 稳态转向角速度增益曲线
1.具有中性转向特性汽车的行驶特点
在半径为R的弯道上转弯时,若汽车具有中性转向特性,其转向轮偏转角为 ,与汽车行驶速度V无关;当δ固定不变时,汽车沿给定半径R的圆周行驶,R与V亦无关。
,与汽车行驶速度V无关;当δ固定不变时,汽车沿给定半径R的圆周行驶,R与V亦无关。
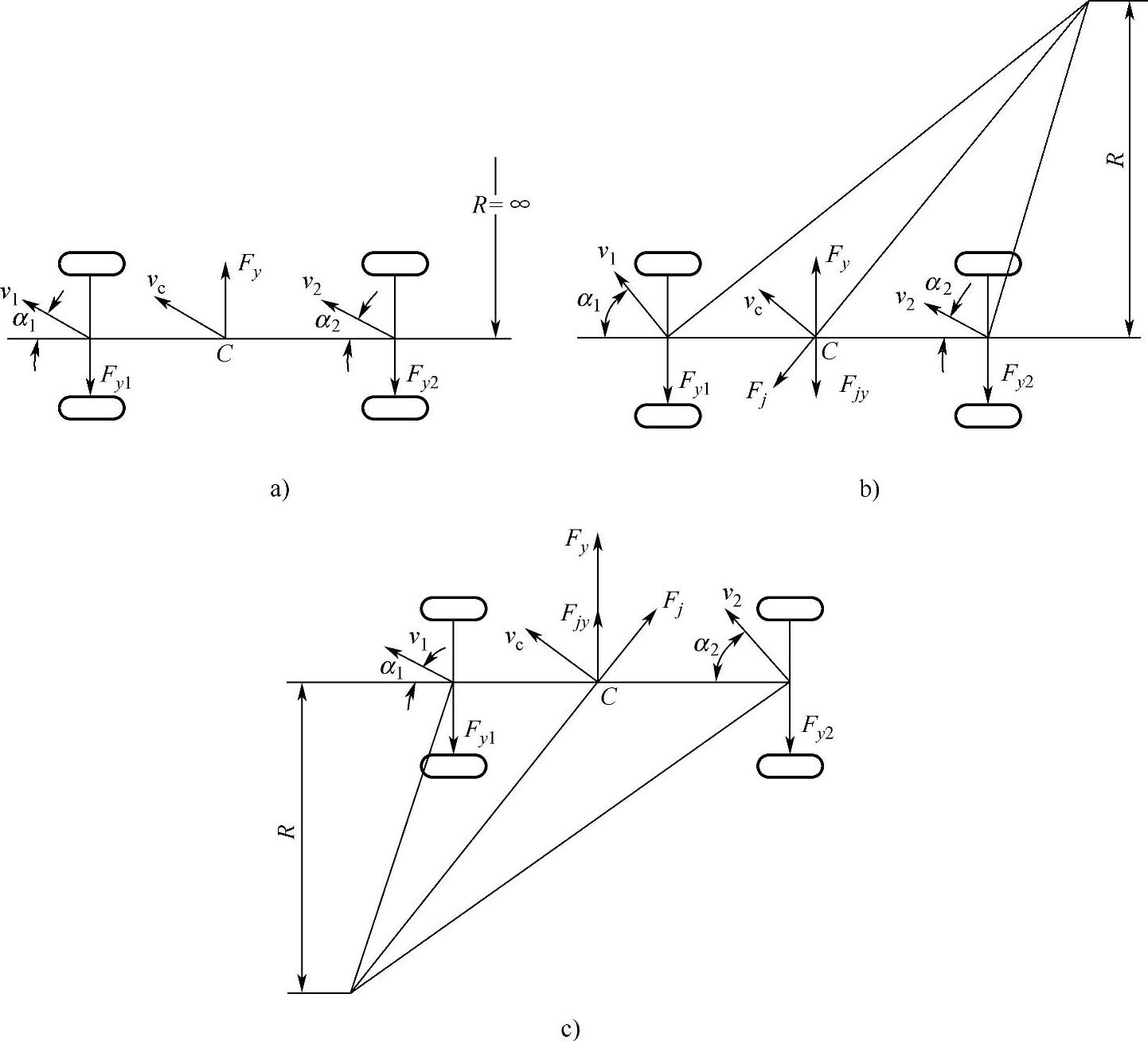
直线行驶时,若侧向力Fy作用于汽车质心,则汽车将沿着与原直线成一定夹角的另一条直线行驶,见图6-15a。若欲维持原行驶方向,需将转向盘向侧向偏离的相反方向转动。
2.具有不足转向特性汽车的行驶特点
同样条件下,具有不足转向特性的汽车,其转向半径R大于装用刚性轮胎车辆的转向半径。若使转向轮转角δ不变,缓慢加速或以不同车速等速行驶,则随着车速V的提高,转向半径R增大,汽车沿更平缓的曲线行驶。沿给定半径R的圆周加速行驶时,应随V的提高不断增大δ。
直线行驶时,若Fy作用于重心,汽车将朝Fy的方向偏转,绕瞬时转向中心作曲线运动,所产生的离心力的分力Fjy的方向与Fy方向相反,削弱侧向力的作用,见图6-15b。侧向力消失后,汽车自动恢复直线行驶。
由图6-14可见,当K>0,汽车具有不足转向时,则随着车速V的提高,稳态转向角速度增益 起初增大,但达到最大值后,随着V的提高,
起初增大,但达到最大值后,随着V的提高, 反而减小。
反而减小。 达到最大值时,所对应的V称为特征车速Vh。而且,不足转向性越大,即K>0的值越多,则Vh(m/s)越低。
达到最大值时,所对应的V称为特征车速Vh。而且,不足转向性越大,即K>0的值越多,则Vh(m/s)越低。
对式(6-11)求对于车速V的导数,并令其为零:
因此得到:
 (https://www.xing528.com)
(https://www.xing528.com)
图6-15 不同转向特性汽车的稳定性
a)α1=α2 b)α1>α2 c)α1<α2

若K值过大,特征车速过低,说明其不足转向性太大,汽车转向沉重,转向灵敏性差。现代轿车在侧向加速度为0.3g时,其K的平均值为0.0024s2/m2,在0.5g时K的平均值为0.0026s2/m2。
3.具有过度转向特性汽车的行驶特点
若汽车具有过度转向特性,其特性与具有不足转向特性的汽车相反。当转向轮转角δ固定不动时,随着车速V升高,转向半径R越来越小,汽车沿更弯曲的曲线行驶,V过高可能导致汽车侧滑。
沿给定半径R的圆周行驶时,其δ应随V的提高而减小,即应随车速的提高不断减小转向盘转角。当达到临界车速时,只要有微小的前轮转角也将产生极大的横摆角速度(汽车绕转向中心转动的角速度),即转向半径越来越小,汽车将发生急转。直线行驶时,若遇侧向力Fy作用于质心,汽车将朝与侧向力相反的方向偏转,绕瞬时转向中心作曲线运动。此时,所产生的离心力的分力Fjy的方向与Fy方向相同,有进一步加剧侧偏的作用,见图6-15c。因此,行驶过程中,当转弯或受到干扰时,过度转向特性的汽车具有失去方向稳定性的危险。
由图6-14可见,当K<0,汽车具有过度转向时,则随着车速V的提高,汽车的稳态转向角速度增益 迅速增大,当V达到Vr后,
迅速增大,当V达到Vr后, 趋于无穷大。Vr称为临界车速。
趋于无穷大。Vr称为临界车速。
由式(6-11)直接看出:

当K<0时,若车速达到Vr,则有 。意味着极其微小的前轮转角δ,都会产生极大的转向角速度ω,汽车将失去稳定性。显然,K越小,过度转向性越大,则Vr越低,汽车越易于失去稳定性。
。意味着极其微小的前轮转角δ,都会产生极大的转向角速度ω,汽车将失去稳定性。显然,K越小,过度转向性越大,则Vr越低,汽车越易于失去稳定性。
把式(6-14)代入式(6-8)得到:当V=Vr时,其稳态转向半径R=0。这进一步说明,当K<0,即汽车具有过度转向时,若车速达到Vr,直线行驶的车辆即使受到极小的Fy作用,使之产生很小的δ,也会失去控制,发生激转,直至R=0。
因此,具有过度转向的汽车是不稳定、不安全的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。