



1.巡航控制系统组成及原理
巡航控制系统是一个速度控制系统,它在正常行驶条件下保持40km/h以上的期望车速。陡坡可能会引起所选择车速的变化。
巡航控制系统主要包括以下部件:加速踏板、制动踏板位置(BPP)传感器、车身控制单元(BCU)、巡航接通/关闭开关、巡航控制取消开关、恢复开关、设置开关、发动机控制单元(ECU)、节气门执行器控制(TAC)电动机、车速传感器。
维修知识
车身控制单元(BCU)监测转向盘上的巡航控制开关的信号电路。车身控制系统通过GMLAN串行数据电路将巡航控制开关状态传达至发动机控制单元(ECU)。发动机控制单元运用巡航控制开关的状态来决定什么时候该达到和保持车速。发动机控制单元监测车速信号电路,以决定期望车速。发动机控制单元使用节气门执行器控制电动机以保持车速。
通过由车身控制单元供电的转向盘控制开关参考电压电路,电压被供给到巡航控制开关。巡航控制功能开关设计为梯型电阻,每个巡航控制功能开关有一个不同的电阻值。车身控制单元检测一个与被启用的巡航控制功能开关相联系的特定电压。当常开型巡航控制接通/关闭开关接通时,该开关闭合。
2.巡航控制系统的启用
1)根据位于转向盘上的以下巡航控制开关的启动,巡航控制系统将启用并调整车速:On/Off(打开/关闭)、+RES(+恢复)、-SET(-设置)。
2)为了启用巡航控制系统,确保车速在40km/h以上,将巡航“On/Off(接通/关闭)”开关置于On的位置,并瞬时按下“-SET(-设置)”开关。发动机控制单元将启用巡航控制系统并记录车速。发动机控制单元向仪表板组合仪表(IPC)发送一组GMLAN串行数据信息,以点亮仪表板组合仪表上的巡航启用指示灯。
3)在巡航控制系统启用时踩下加速踏板,允许驾驶人超控巡航控制系统,以使车辆加速超过当前设置的车速。松开加速踏板时,车速下降,并恢复到当前设置的车速。
3.巡航控制系统的停用
发动机控制单元(ECU)将根据制动踏板位置(BPP)传感器、接通/关闭开关、巡航控制取消开关发出的信号,停用巡航控制系统。
1)使用制动踏板时,巡航控制系统将停用。车身控制单元(BCU)通过制动踏板位置传感器信号电路监控制动踏板位置。发动机控制单元通过一项直接输入和一项来自车身控制单元指示刹车状态的GMLAN串行数据信息,监控制动踏板位置信号。当两个信号都指示制动踏板踩下时,发动机控制单元将关闭巡航控制系统。
2)当巡航控制“On/Off(接通/关闭)”开关置于“Off”位置时,或巡航控制“Cancel(取消)”开关启用时,巡航控制系统也将停用。
3)每次停用巡航控制系统时,发动机控制单元将记录系统停用的原因。发动机控制单元的存储器会记录最后8次断开的原因。
4.巡航控制系统被禁用
当出现以下任何情况时,发动机控制单元(ECU)将禁用巡航控制系统:
1)发动机控制单元没有检测到车身控制单元(BCU)启用制动踏板。
2)设置了巡航控制系统故障码。
3)车速小于40km/h。
4)车速过高。
5)变速杆置P位、R位、N位或一档位。
6)发动机转速过低。(https://www.xing528.com)
7)发动机转速过高。
8)系统电压不在9~16V之间。
9)防抱死制动系统(ABS)/牵引力。
5.大众奧迪巡航系统
(1)系统组成及功能
自适应巡航系统见表4-19。
表4-19 自适应巡航系统
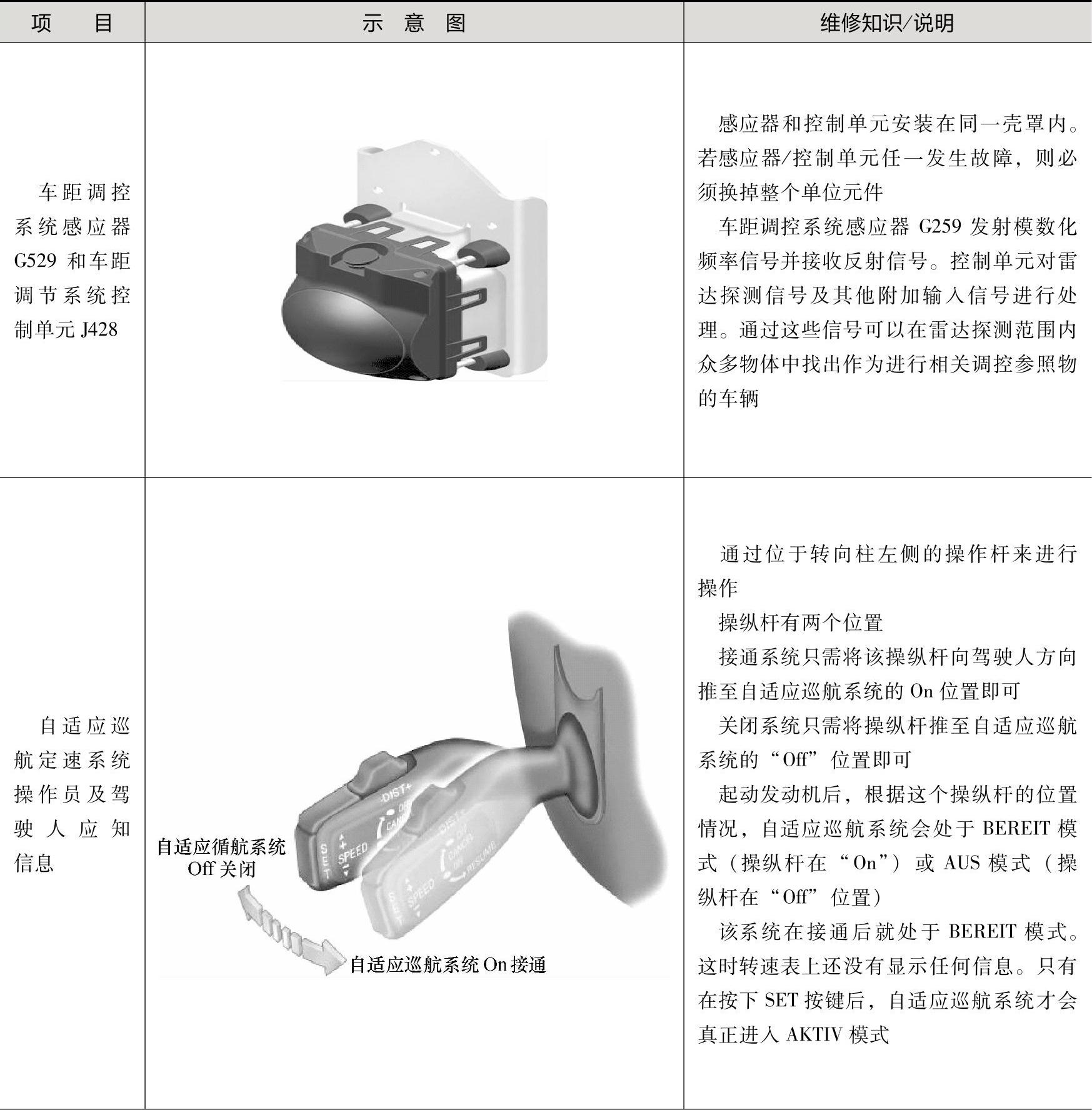
(续)

(2)巡航控制原理
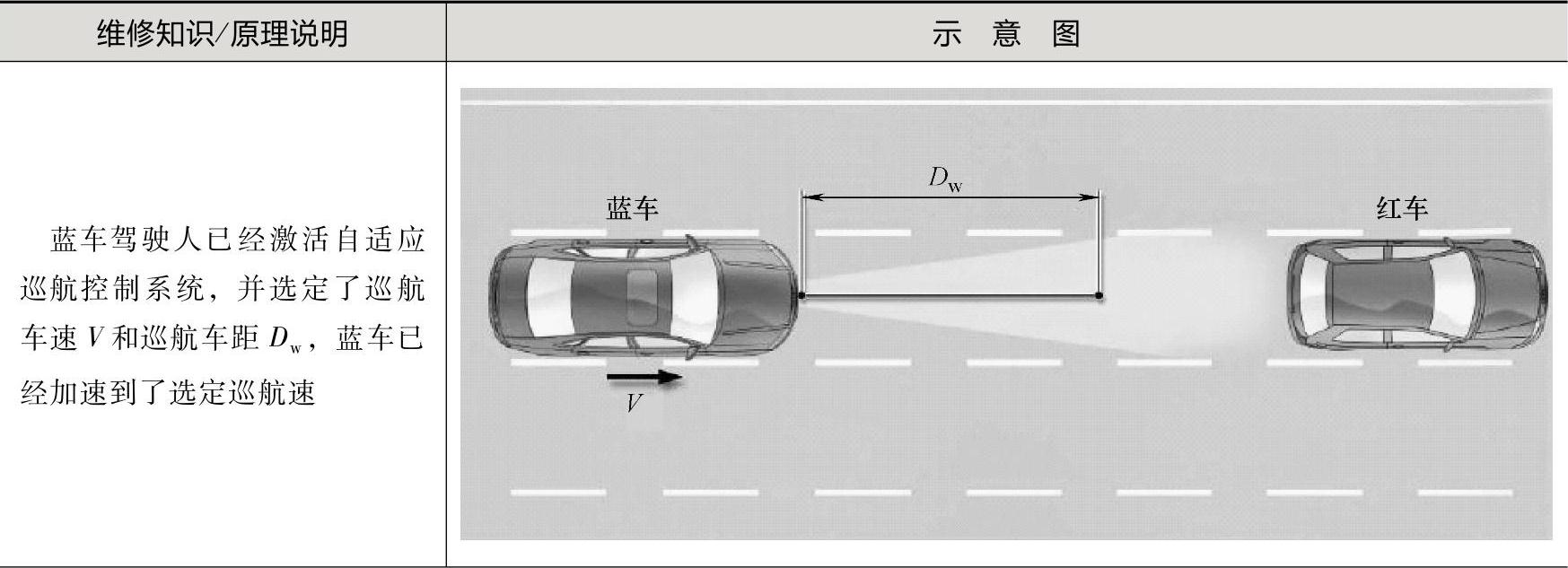
举例说明巡航控制原理见表4-20。
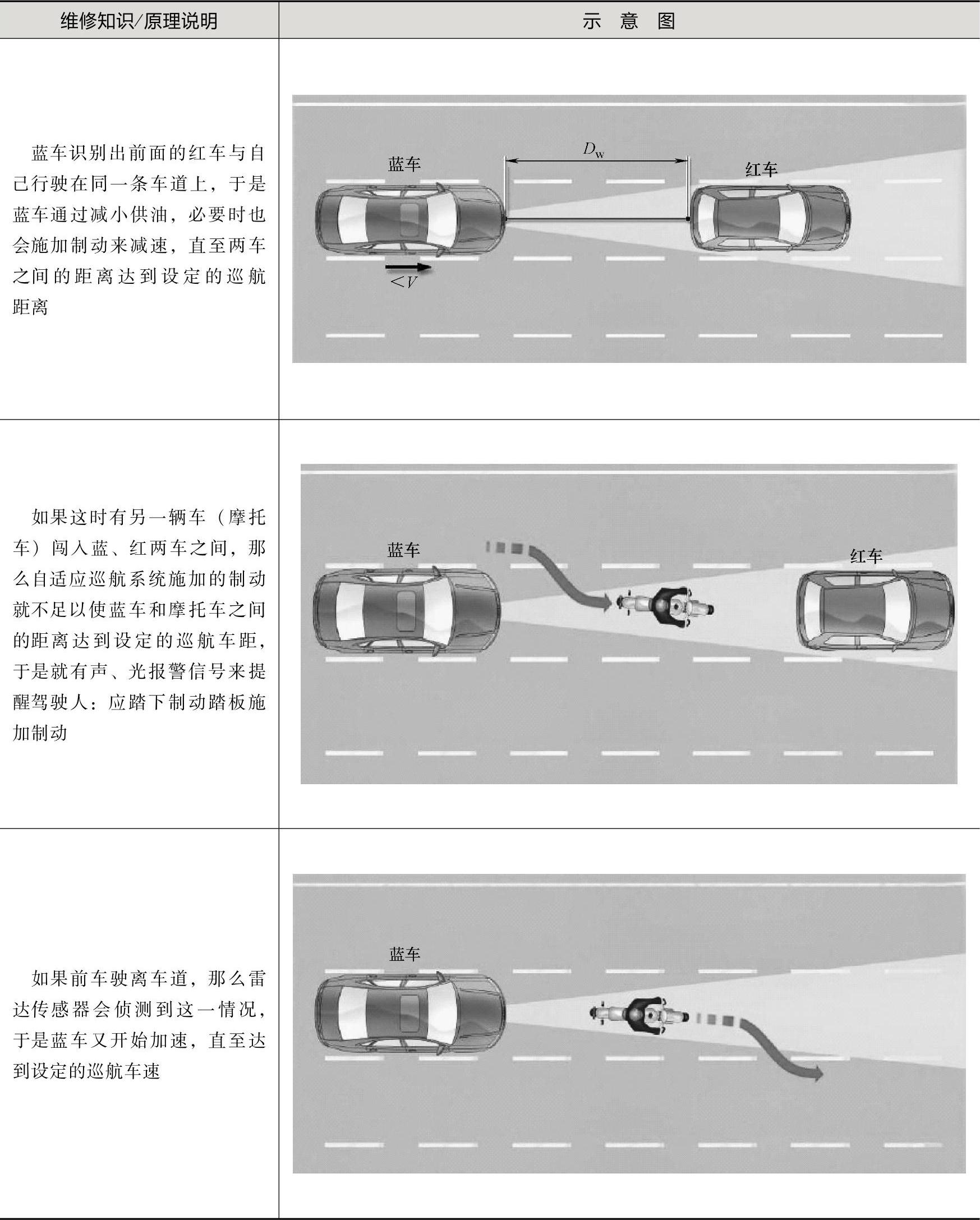
表4-20 自适应巡航控制系统工作原理
(续)
(3)车距调节传感器调整
雷达信号测出与前车的车距约为130m。如果传感器在水平方向上偏离正确位置1°的话,那么在130m处就会产生2.1m的偏差。因而,在极端情况下,本车就可能按照相邻车道上的一辆车来调节车距,如图4-25和图4-26所示。
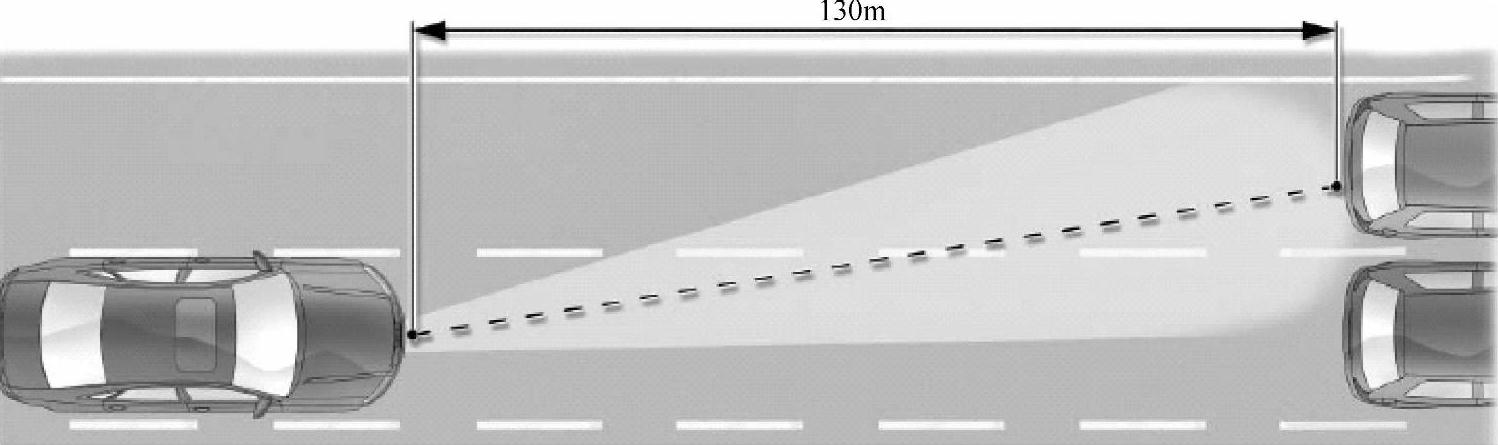
图4-25 巡航车距传感器调整(一)
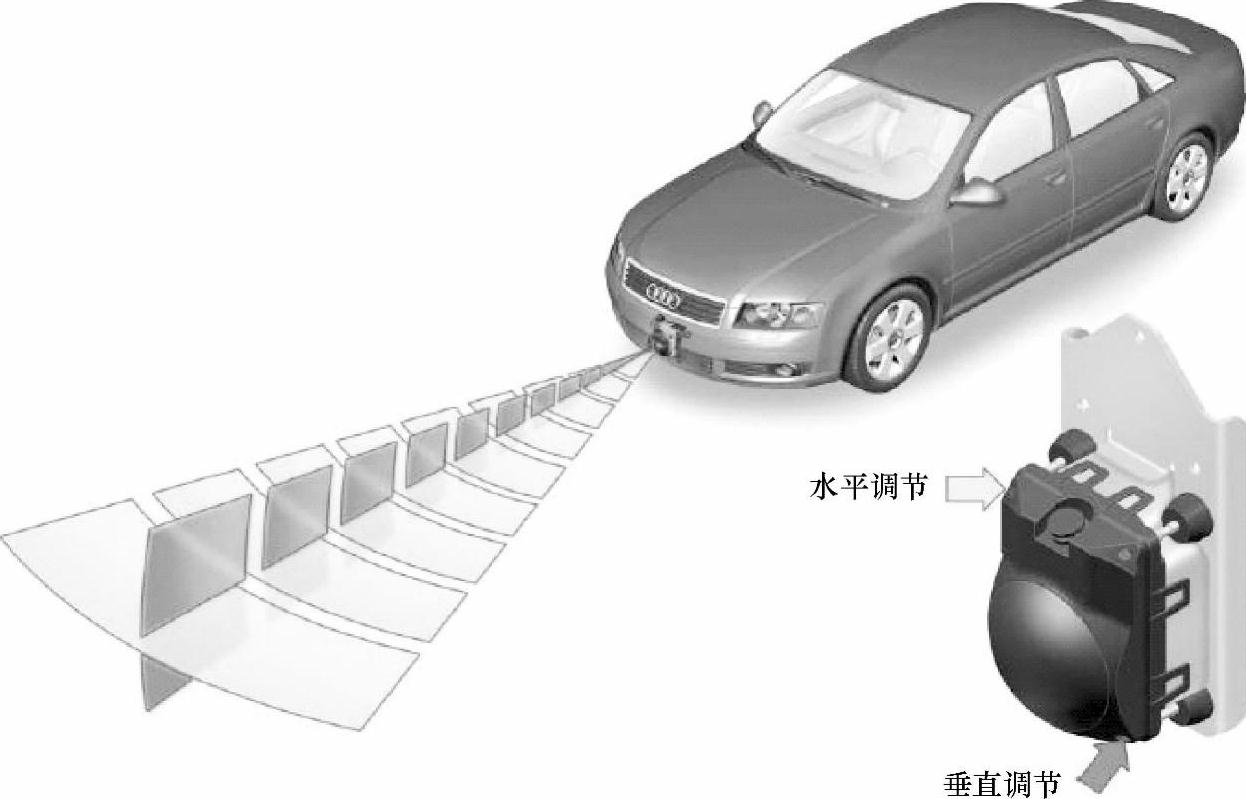
图4-26 巡航车距传感器调整(二)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。