



轴对称矢量喷管(Axisymmetric Vectoring Exhaust Nozzle,AVEN)是先进航空发动机的重要部件之一,其操纵机构是一个包含柔性构件的柔性机构系统,某发动机矢量喷管机构如图5-2所示。
矢量喷管机构为一个空间多柔体系统,由液压缸、三角拉杆、扩张片和矢量调节环等部件组成。矢量喷管机构的运动是通过三个液压缸P1、P2、P3的驱动完成的,当液压缸推动矢量调节环P4,可以带动三角拉杆P5和扩张片P6运动。当液压缸不作同步驱动时,矢量调节环产生偏转,通过三角拉杆带动扩张调节片使其偏转,发动机的喷气气流会偏离发动机中轴线,从而产生矢量推力;当液压缸作同步驱动时,会沿着发动机的轴向驱动矢量调节环,使各个扩张调节片作一致的偏转,从而调节喷管出口截面积的大小[123,124]。
矢量喷管机构中三角拉杆和扩张片外形较为细长并且也是主要受力构件,在机构运动时可能会出现较大的变形,其变形可能对整个机构运动产生重要影响。因此将三角拉杆和扩张片考虑为柔性构件,其他构件则仍作为刚性构件处理。矢量喷管机构的建模方法和仿真分析过程与空间站展开机构相同,具体方法见参考文献[123,124]和参考文献[214,215]。矢量喷管机构的运动由三个液压缸联动驱动,一个运动周期要经历加速、平稳运动、减速三个过程。在矢量喷管机构的三个运动过程中,液压缸的驱动规律如图5-27所示。由于柔性构件变形和运动耦合的影响,机构动态响应为高度非线性,机构运动的随机性增大。
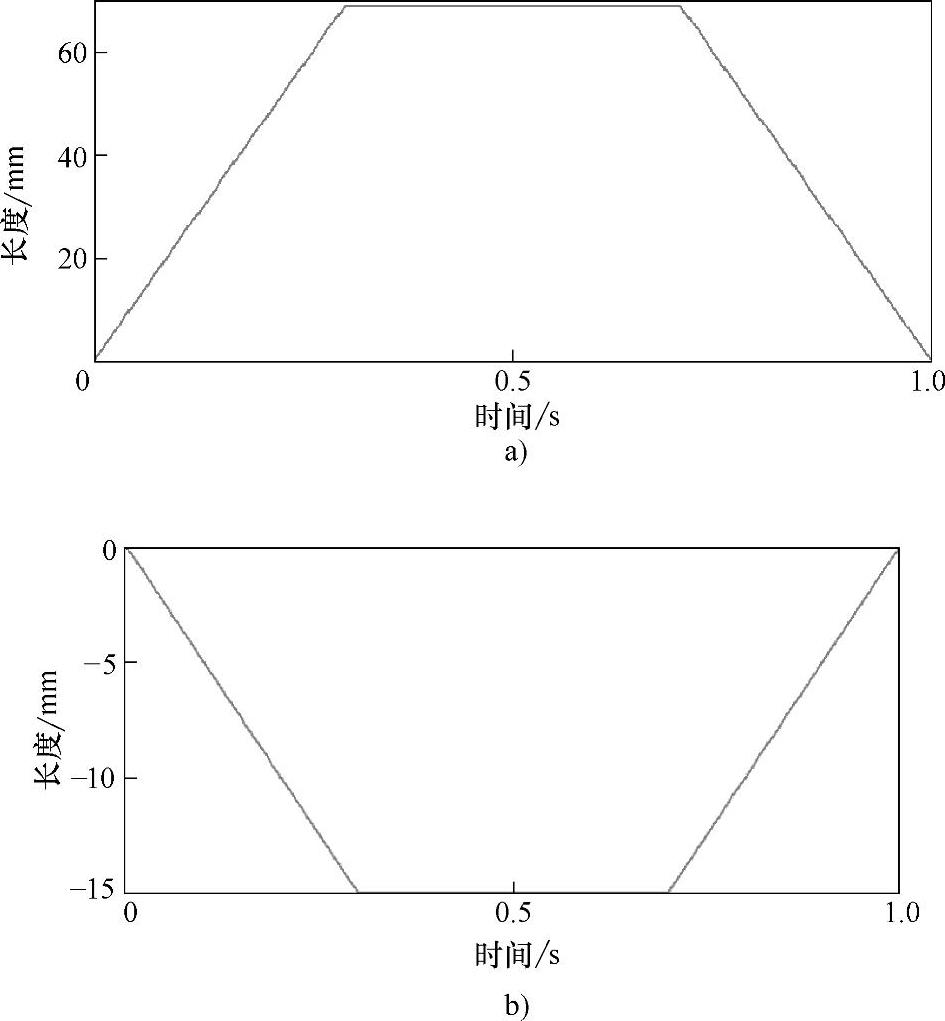
图5-27 液压缸驱动规律(https://www.xing528.com)
a)液压缸P1驱动规律 b)液压缸P2和P3驱动规律
确定矢量喷管机构的3个液压缸的速度为v1、v2和v3,以及衡量气动载荷连续性的载荷系数c,其设计值和按照MC方法随机抽样50组数据的抽样均值和方差见表5-9。
表5-9 随机变量抽样数据的均值及方差

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。