



柔性机构系统中的柔性构件一般为细长杆件、薄板件,在力学模型上通常作为柔性梁。对于包含有柔性体的机构系统,通过有限元方法将柔性体分割为有限个单元,将单元质量集中到节点上。

式中 Mi——柔性机构系统内第i个柔性体的质量;
Mij——第i个柔性体中第j个单元的质量;
n——第i个柔性体的单元数量。
柔性多体系统使用的坐标系与多刚体系统不同,这里采用浮动坐标系的形式建立柔性多体系统的坐标系,如图2-1所示。设柔性体任意节点Pi在变形以后相对于柔性体质心Oi的矢径为ui,而未变形时Pi处于矢径ui0的位置,节点Pi的平移变形矢量为uif。建立Ox1x2x3坐标系,称为惯性坐标系,不随时间而变化;在柔性体的质心Oi处建立Oixi1xi2xi3坐标系,称为浮动坐标系,可以相对于惯性坐标系作有限的移动和转动。这样,柔性体上各点之间存在的相对变形,则用浮动坐标来表示[2-4,144]。
图2-1中:Ox1x2x3为惯性坐标系;Oixi1xi2xi3为柔性体质心Oi处的浮动坐标系;Pi为柔性多体系统中第i个柔体上的任意节点;ui表示节点Pi在变形以后相对于柔性体质心Oi的矢径,即相对于浮动坐标系的矢径;ui0表示节点Pi相对于浮动坐标系在零变形(变形前)时的相对位置矢量;uif表示节点Pi平移变形矢量。Ri为柔性体质心Oi相对于惯性坐标系原点O的矢径;ri为节点Pi相对于惯性坐标系原点O的矢径。

图2-1 系统的浮动坐标系
当柔性体作平面运动时,对于柔性机构系统中第i个柔性体上的任意节点Pi,相对于浮动坐标系的矢径ui和变形uif可以表示为
ui=ui0+uif (2-2)
所以,相对于惯性坐标系的矢径ri可以表示为
ri=Ri+Aiui (2-3)
将式(2-2)代入式(2-3),得
ri=Ri+Ai(ui0+uif) (2-4)
其中,Ai表示坐标变换矩阵:

式中,θ为浮动坐标系相对于惯性坐标系的转角。将uif用模态函数矩阵和模态
坐标表示,有
uif=Φiqif (2-6)
式中 Φi——相对于惯性坐标系的模态函数矩阵;
qif——模态坐标。
如果相对于浮动坐标系的模态函数矩阵用Φif表示,则
Φif=(φif1φif2 … φifs) (2-7)
那么柔性体相对于浮动坐标系的矢径可以表示为
ui=ui0+Φif+qif (2-8)
将式(2-6)代入式(2-4),得到节点Pi相对于惯性坐标系的矢径ri为
ri=Ri+Aiui=Ri+Ai(ui0+Φifqif) (2-9)
为了缩减求解规模,一般情况下只需保留有限阶模态,即
Φi=(φi1φi2 … φis) (2-10)
qif=(qi1qi2 … qis) (2-11)
式中 s——保留模态的阶数。
通过上述方法,柔性体的位形就可以由浮动坐标系的笛卡儿坐标(x,y,z)和模态坐标q来描述了。
柔性体作平面运动时,柔性体上任意节点Pi的速度可以由式(2-9)对时间求导得到,因为u0和Φf为常值矩阵,所以

其中第二项可以用动坐标系旋转坐标对时间的导数来表示以便得到简洁的形式,即

令


则

式中 ωi——浮动坐标系相对于惯性坐标系的角速度。
柔性体任意节点的速度可以写为如下形式,在这里去掉上角标i,表示其适用于柔性机构系统中的任意柔性体。

式中,AΦf可以转换为惯性坐标系的模态函数,Φ=AΦf;I为2×2单位矩阵。令

则式(2-17)可以简写为

式中,列阵 具有速度量纲,由柔性体浮动坐标系的绝对速度、绝对角速度以及柔性体的模态速度组成。柔性体任意节点相对于浮动坐标系的速度
具有速度量纲,由柔性体浮动坐标系的绝对速度、绝对角速度以及柔性体的模态速度组成。柔性体任意节点相对于浮动坐标系的速度 由式(2-8)对时间求导得到,因为u0和Φf为常值矩阵,所以
由式(2-8)对时间求导得到,因为u0和Φf为常值矩阵,所以

柔性体任意节点的加速度 由式(2-12)对时间求导得到,即
由式(2-12)对时间求导得到,即

由于(https://www.xing528.com)

将式(2-8)、式(2-21)和式(2-23)代入式(2-22)可以得到相对于惯性坐标系的绝对加速度为

即

式中  ——节点的牵连移动加速度;
——节点的牵连移动加速度;
 ——节点的相对变形加速度;
——节点的相对变形加速度;
 ——节点的科氏加速度;
——节点的科氏加速度;
-Auω2——节点的牵连转动法向加速度;
 ——节点的牵连转动切向加速度。
——节点的牵连转动切向加速度。
柔性体任意节点相对于浮动坐标系的加速度 由式(2-18)对时间求导得到,即
由式(2-18)对时间求导得到,即

根据式(2-17)、式(2-18)和式(2-19)也可以将式(2-24)改写为模态函数和模态坐标的矩阵形式,即

柔性体的动能T为

式中 ρi——柔性体的密度;
 ——柔性体的广义坐标;
——柔性体的广义坐标;
M——柔性体的广义质量矩阵。
这样,柔性体的广义质量矩阵就可以表示为
其中
根据速度变分原理,平面柔性体的速度变分形式的动力学方程为

式中 Fj——作用于节点上的外力;
εjT——单元应变;
σj——单元应力。
根据结构动力学的虚功原理,柔性体各个单元应力的总虚功为

式中 Dq——模态阻尼矩阵,为常值矩阵;
Kq——模态刚度矩阵,为常值矩阵。
将式(2-20)、式(2-27)和式(2-37)代入式(2-36),整理得

式中,M为柔性体的广义质量矩阵;W为柔性体的广义惯性力矩阵,且
F为柔性体的广义外力矩阵,且

Fu为柔性体的广义变形力矩阵,且

对于空间柔性体描述,与平面柔性体描述方法类似,对柔性体进行有限元离散处理,用浮动坐标系的笛卡儿坐标和模态坐标表示空间柔性体的位形。有所不同的是在描述空间柔性体时,增加了反映空间柔性体方位的欧拉角,如图2-2所示。空间柔性体的位形由ξ来表示,即
ξ={x,y,z,φ,ϕ,θ,q}T (2-42)
图2-2中,(x,y,z)为笛卡儿坐标,用于描述空间柔性体的位置;(φ,ϕ,θ)为欧拉角,用于描述空间柔性体的方位。
空间柔性体的动能T为
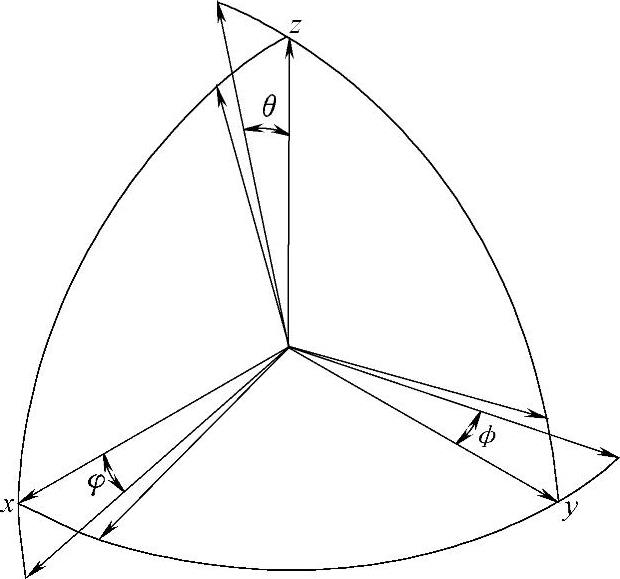
图2-2 惯性坐标系的笛卡儿坐标和欧拉角

应用拉格朗日乘子法建立空间柔性体的动力学方程为

式中 D——阻尼矩阵;
fg——重力;
Q——广义外力。
式(2-44)为微分代数方程(Differential Algebraic Equations,简称DAEs),一般情况下无法得到解析解,只能用数值方法求解。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。