



随着网络技术在汽车上的成功应用,在很多汽车上,如奔驰、宝马、奥迪、帕萨特等,发动机控制系统已不再是一个独立的控制系统,它还通过CAN(Controllers Area Net-work)技术与其他控制系统(如空调系统、巡航控制系统、防盗系统、音响和舒适系统、ABS和牵引力控制系统等)实现了网络互联,实时进行数据共享和网络通讯。这不仅提高了车辆的整体控制性能和控制精度,而且大大减少了传感器、信号线和电脑管脚的数量,控制系统的升级和配置更容易、更灵活。
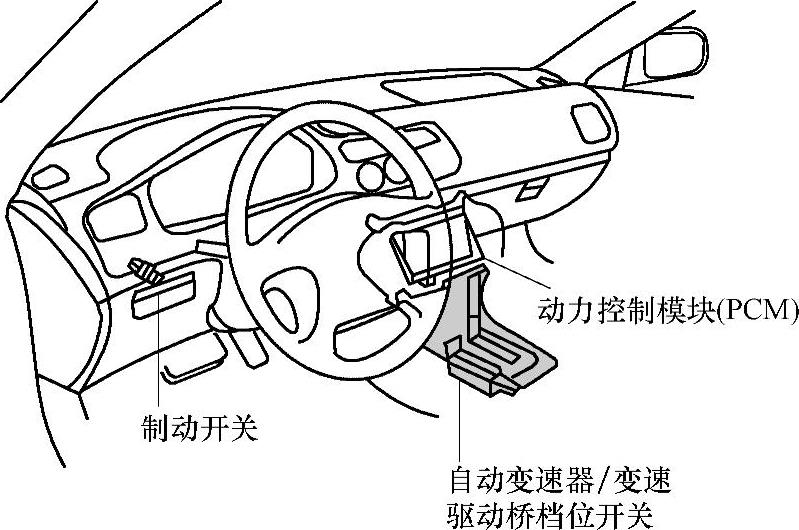
图1-49 动力控制模块(PCM)的位置
图1-50为奔驰S320(220底盘)轿车上使用的CAN网络系统。
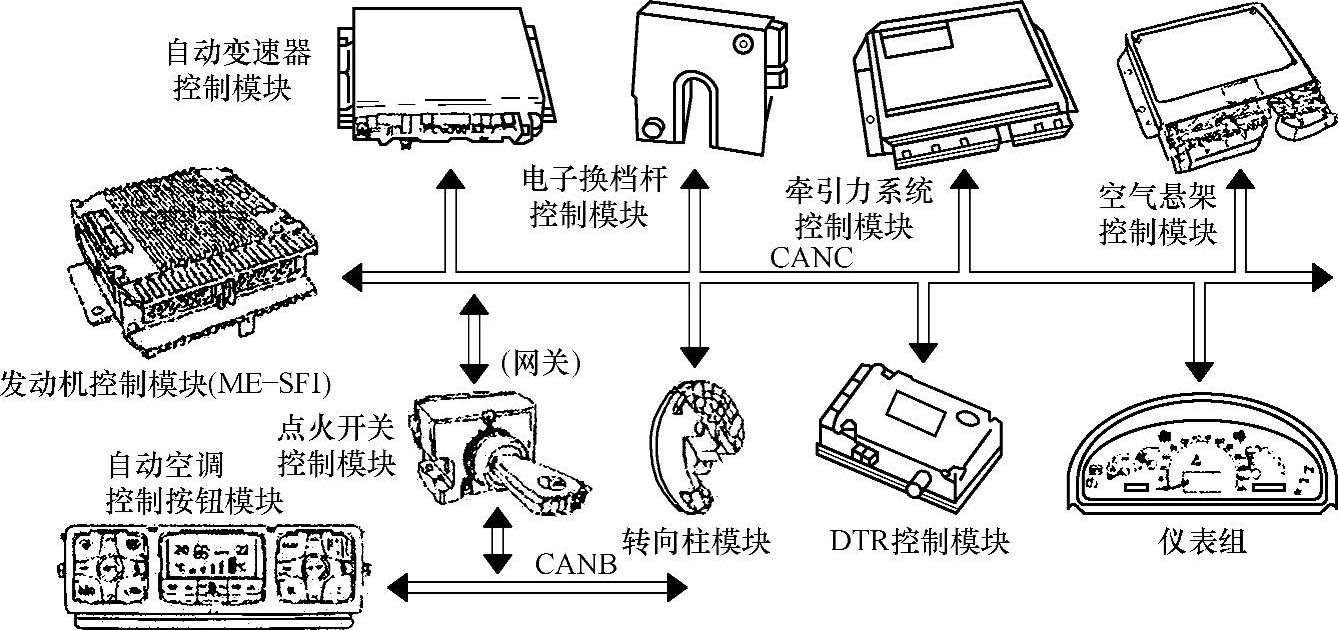
图1-50 奔驰320轿车CAN网络系统示意图
现代汽车上的电控系统有不断增加的趋势,一辆轿车上传感器可能多达40~50个,导线达1500多条,重达37~91kg,在一些高级轿车中,导线的总长度达4.8km,连接的终端设备达2000多个。这些传感器、导线和相关的电控设备价值1000~2000美元。另外,若需增加电控系统,都需要增加导线、电子控制单元、传感器、执行器等。而且,车辆各系统之间需要相互链接,相互通信。若不通过网络,这些相互链接将使导线十分复杂,并且电控单元(ECU)的针脚数量将不断增加,从而导致费用提高、故障率增多以及维修困难等问题。为了解决这些问题,汽车网络系统(CAN Controller Area Network,又称为多路传输系统)应运而生。
奔驰220车型上,所有电控系统都通过CAN总线系统连接成网络,在指令端(如灯开关、温度传感器)和执行元件(如灯、风扇)之间没有直接的电路连接。指令端的指令由一个电子控制单元接收,该电子控制单元再通过CAN总线向另外一个电子控制单元发送一条相应的信息,接收到此信息的电子控制单元再驱动相应的执行元件。车身系统总线(CANB)与动力和底盘系统的总线(CANC)之间的主要区别是传输速度不同,CANC总线的传输速度为125kB/s,而CANB总线仅为83kB/s,因为车身系统传输的信息并不要求那么快。它们之间的数据交换必须通过点火开关控制模块(N73),它相当于网关。点火开关控制模块(N73)还提供CANB上的电子控制单元与奔驰专用诊断仪(STAR DIAGNOSIS)K线之间的接口。
1.CAN的特点
使用网络有许多优点,包括:
①电子控制单元之间能共享传感器输入的信息。
②实现多个电子控制单元参与复杂的汽车系统操作。(https://www.xing528.com)
③提高抗电磁干扰能力。
④提高诊断能力。
综合以上优点,即联成网络的电子控制单元能使控制器“协同工作”来协调汽车的各系统,从而获得最佳的工作状态,并使汽车具备实现许多复杂功能的能力。
下面是有些装有网络和牵引力控制系统的汽车使用两个电子控制单元来保持汽车的牵引力的实例。
当车速和发动机负荷低于某个设定值时,ABS的电子控制单元对驱动轮进行脉动制动以防止车轮打滑,同时PCM(Power train Control Module)推迟点火提前角以减小发动机扭矩。而当车速和发动机负荷高于该设定值时,只有PCM通过减小发动机转矩来防止车轮打滑。PCM通过推迟点火提前角或减小节气门开度来减小发动机转矩。
在这个系统中,两个电控单元之间的通讯保证了汽车能处于防止车轮打滑的最佳状态。这两个系统都需要车速、车轮转速和发动机负荷的信息。如果没有网络,PCM和ABS电子控制单元需要各设一套传感器来提供这些信息。有了网络,联网的所有电子控制单元就可以共享输入信息,这样就不需要给每个ECU各配一套传感器了。
由此可见,当电子控制单元共享输入信息时就能对汽车进行更为复杂的控制。同时汽车还减少了传感器和导线,从而减轻车重,提高性能。
2.CAN基本工作原理
CAN是控制器通过网络交换数据。一辆汽车不管有多少电脑,无论信息容量有多大,每个电脑只需引出两条线连接到数据总线(BUS)上,即可实现数据交换。CAN数据总线由一条双绞线构成,这两条导线不能混淆(低电位和高电位)。一般,总线两端必须各有一个终端设备,如奔驰220上发动机电子控制单元(ECU)和倒车灯(RFL Reverse Shift Light)电子控制单元是终端没备,终端电子控制单元中装有电阻器,作用是避免数据传输到终端以后发生反射波而破坏数据。如果在CAN数据线上测量电阻,测得的是各个终端设备中终端电阻的并联电阻。
在CAN数据总线上按不同的时间间隔传输数字数据,每个数据组都按协议定义,以确定数据是由哪个电子控制单元发出的,该由哪个电子控制单元接收。网络中的每个电子控制单元都能发送或接收数据。数据组的总数、两个数据组之间的时间间隔及CAN数据口总线的其他特性不断被检验,若检测到任何错误都将存储下来。
CAN总线上的数据以广播方式进行通信。广播通信通过面向信息的传输协议获得,所以无需定义控制电脑及其地址,而只需定义信息。这些信息通过信息标识符来确认。此信息标识符在整个网络中必须是唯一的,它不仅定义了信息内容,而且还定义了信息的优先级。当多个控制电脑争着访问总线时,这一点显得尤为重要。通过面向内容的寻址方式可以获得高级的系统和配置的灵活性。向已有的CAN网络增加控制电脑十分容易,如果新增的只是单纯的接收器,则现有的控制电脑无需作任何软硬件改动。这样,就实现了模块化电子控制概念,而且允许多重接收和分布处理同步,即多个控制电脑需要的信息数据能够通过网络以各个控制电脑不必知道谁是数据发送者的方式来发送。这使得网络易于维护和升级,因为数据传输不依赖于是否能买到某种型号的控制电脑。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。