



1.力和力矩
物体受到不同的力和力矩作用。如果作用力或力矩为零,则物体保持原有状态;如果不是零,物体加速度就朝着合力的方向。
如图5-102所示,作用在车辆上的力有:
1)驱动力。它是使汽车行驶的力。
2)制动力。它和驱动力是一组反作用力。
3)侧向力。它能使汽车转向。
4)附着力。它是由摩擦和重力产生的。
如图5-103所示,作用在车辆上还有其他的力矩:
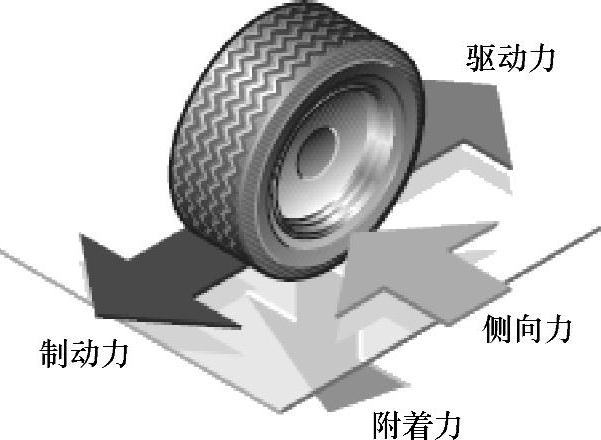
图5-102 车辆上作用的力
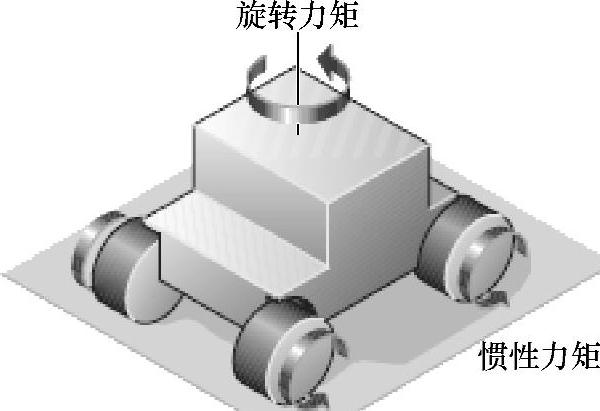
图5-103 车辆上作用的力矩
1)旋转力矩。它使车辆绕着垂直轴旋转。
2)车轮惯性力矩。它能保持车辆运动方向。
下面,借助摩擦圈来讲解几个力的共同作用。如图5-104所示,这个圆圈的半径由路面和车轮间的附着力决定。即:附着力小则半径小(a),附着力大则半径大(b)。这个摩擦圈的基础是由侧向力S、制动力或驱动力B和由此产生的合力G组成的力平行四边形。只要合力在圈内,车辆就处于稳定的状态(图5-104a),如果合力超出圈,车辆就会失去控制(图5-104b)。
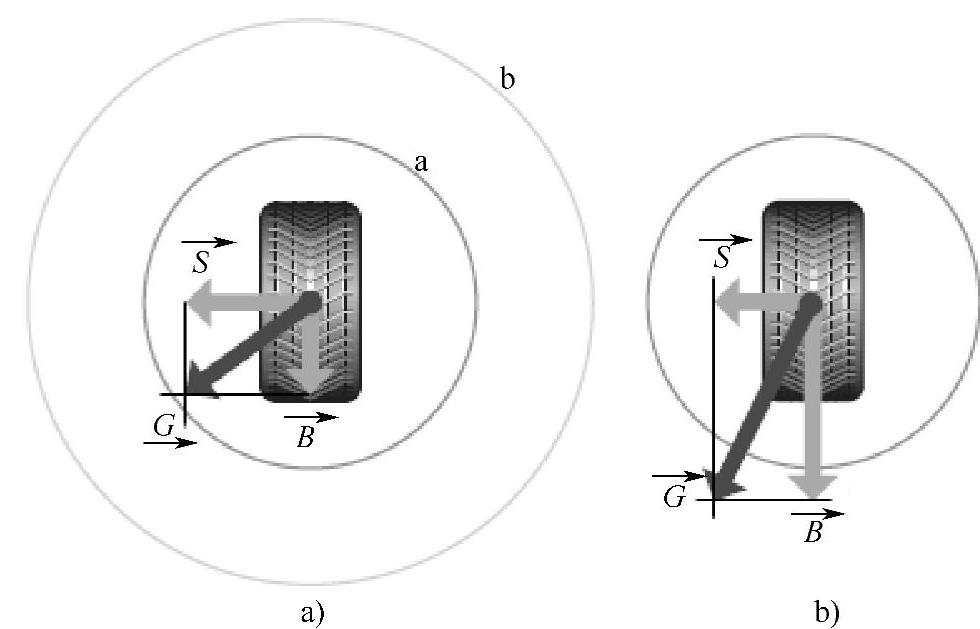
图5-104 摩擦圈
让我们来观察一下这些力之间的相互关系。
如图5-105a所示,如果制动力和侧向力大小合适,使得合力在圈内,则车辆处于可控状态。
如图5-105b所示,制动力增大,则侧向力减小。
如图5-105c所示,合力等于制动力时,车轮处于抱死状态。由于没有侧向力,车辆处于无法控制的状态。驱动力和侧向力的关系也是这样,如果驱动力过大而侧向力等于零,则驱动轮打滑。
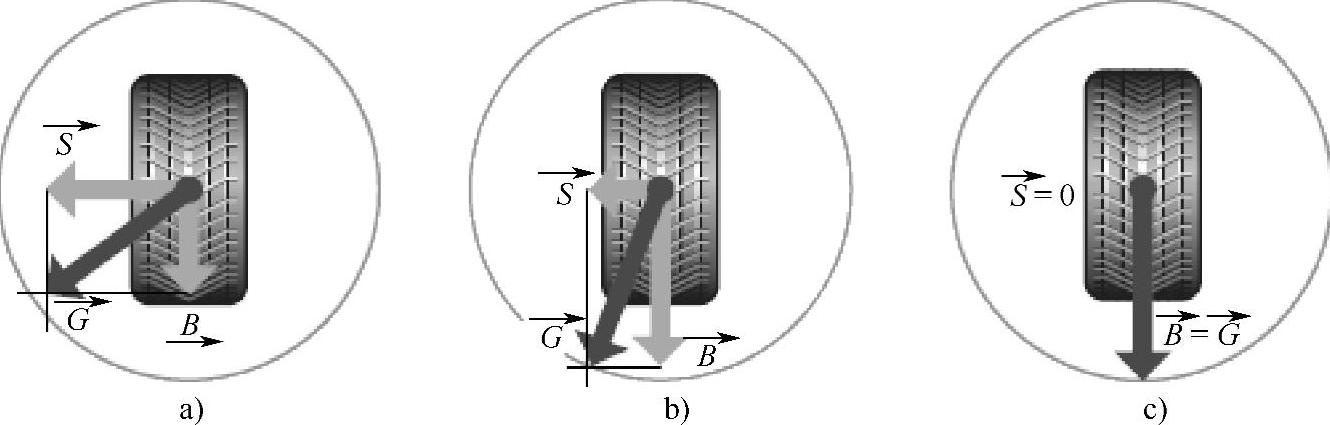
图5-105 作用力之间的关系
2.控制过程(https://www.xing528.com)
为了让ESP系统对不良行驶作出反应,首先要清楚两个问题:
1)驾驶人向什么方向转向。
2)车辆向哪个方向行驶。
第一个问题由转向盘角度传感器和车轮上的轮速传感器来回答。
测量偏转率和横向加速度可得到第二个问题的答案。
如果测出的问题1)和问题2)的结果不一致,ESP可得出结论:车辆行驶状态不好,需要采取措施。车辆行驶状态不好表现在两个方面:
1)车辆转向不足。如图5-106所示,ESP控制系统有意识地对位于弯道内侧的后轮实施瞬时制动及使用发动机和变速器管理系统,从而稳定车辆,防止车辆驶出弯道。
2)车辆转向过度。如图5-107所示,ESP控制系统有意识地对位于弯道外侧的前轮实施瞬时制动及使用发动机和变速器管理系统,防止出现甩尾,并减弱过度转向趋势,从而稳定车辆。
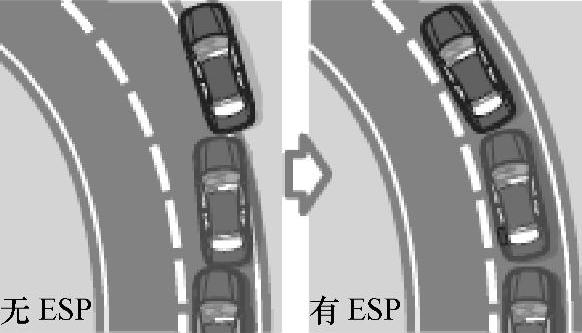
图5-106 车辆转向不足
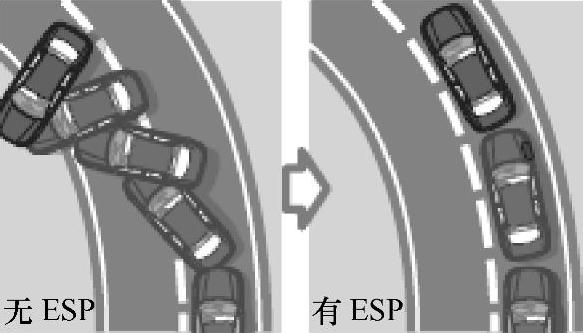
图5-107 车辆转向过度
正如所看到的,ESP控制系统能对转向不足和转向过度作出反应。但在没有进行直接转向时,也必须能改变方向,做到防患于未然。
首先,让我们观察一下无ESP的车辆:如图5-108所示,车辆必须避开突然出现的障碍物,驾驶人先快速左转,然后直接右转。车辆由于突然的转向运动产生了甩尾,驾驶人不再能控制急转的车辆。
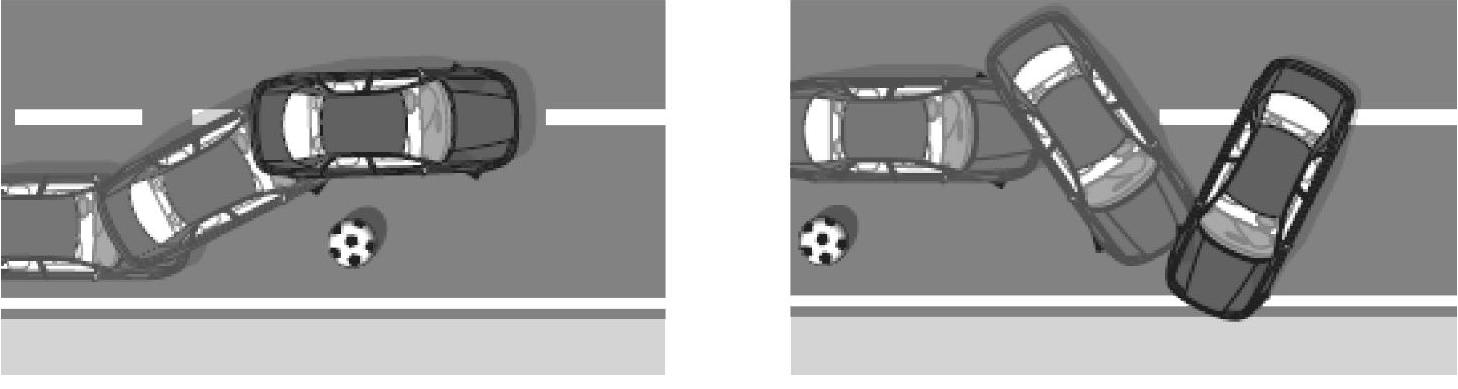
图5-108 无ESP车辆躲避障碍物
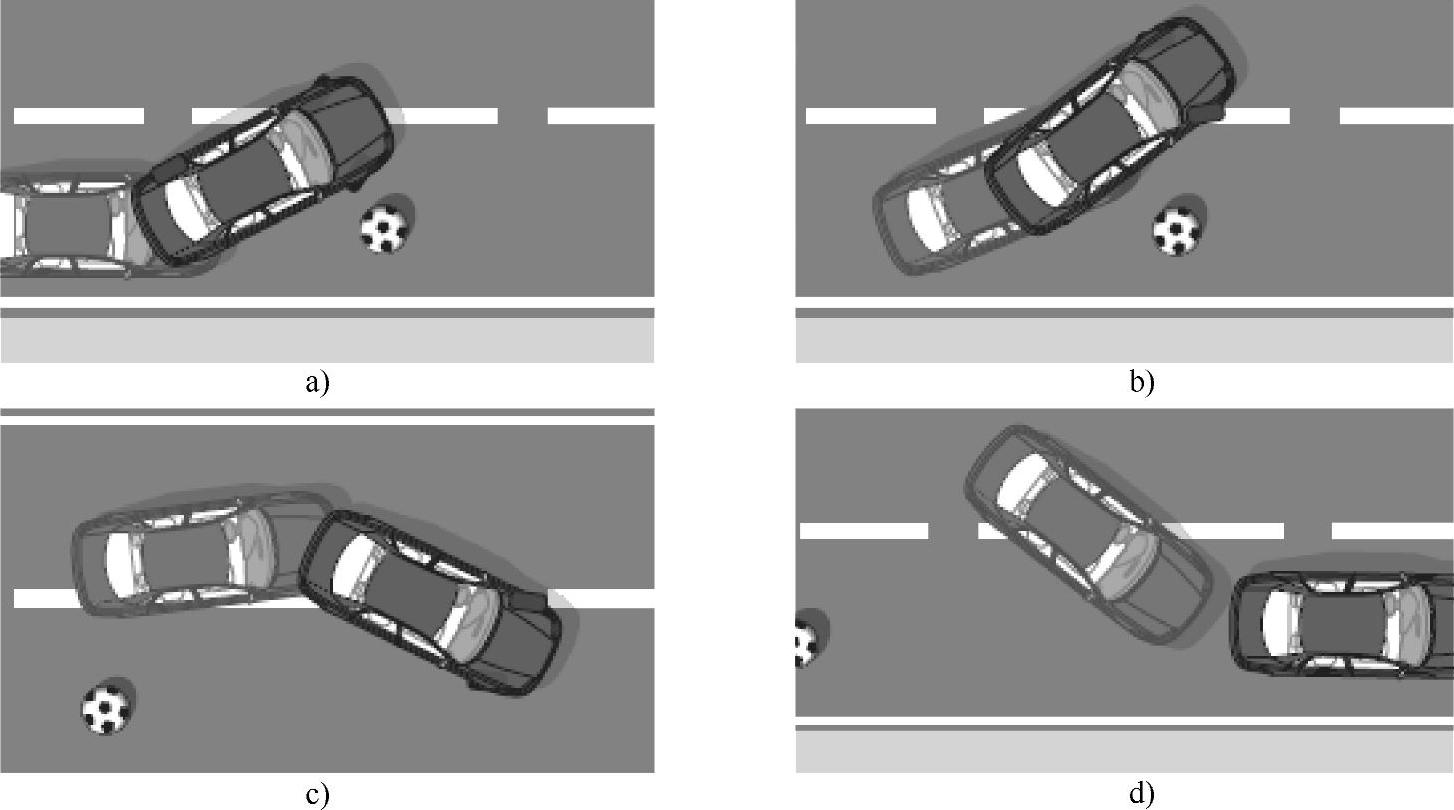
图5-109 有ESP车辆躲避障碍物
让我们再来看看装有ESP的车辆遇到这种情况会怎样:
如图5-109a所示,车辆要避开障碍物,根据传感器测得的数据,ESP知道车辆处于不稳定状态,系统算出处理方法:ESP对左后轮实施制动,这样,就支持了车辆的旋转运动,前轮依旧保持有侧向力。
如图5-109b所示,车辆向左偏转行驶时,驾驶人向右转向,为了支持这个转向动作,右前轮被制动,后轮自由滚动,以保证后轴有最佳侧向力。
如图5-109c所示,前面提到过的车道变化会导致车辆激转,为了防止甩尾,左前轮要制动,在特别紧急的情况下,车轮被紧急制动,以限制前轴的侧向力。
如图5-109d所示,等所有的不稳定行驶状态被纠正后,ESP的调节作用就结束了。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。