



在传统的转向系统上,转向盘与转向器之间是以机械方式直接相连的。因此,转向盘的转角与转向车轮的转角之间就存在着一个固定关系。通过转向齿条和转向齿轮之间齿部的配合,就可以实现不同的传动比特性曲线了。但是,一辆车上只能有一种传动比。在选择合适的传动比时,为了能使得不同的有时甚至是矛盾的要求尽可能地得到满足,那么所选择的传动比实际就是个折中方案。
在图4-54中,水平线所示的就是无动态转向系统的奥迪A4所用的传统助力转向系统传动比特性曲线。这些基本要求(低车速、中等车速和高车速)只有通过可变的传动比特性曲线才能完美地得到满足。这样的特性曲线能够根据车速和转向角来改变转向车轮的实际转动大小。
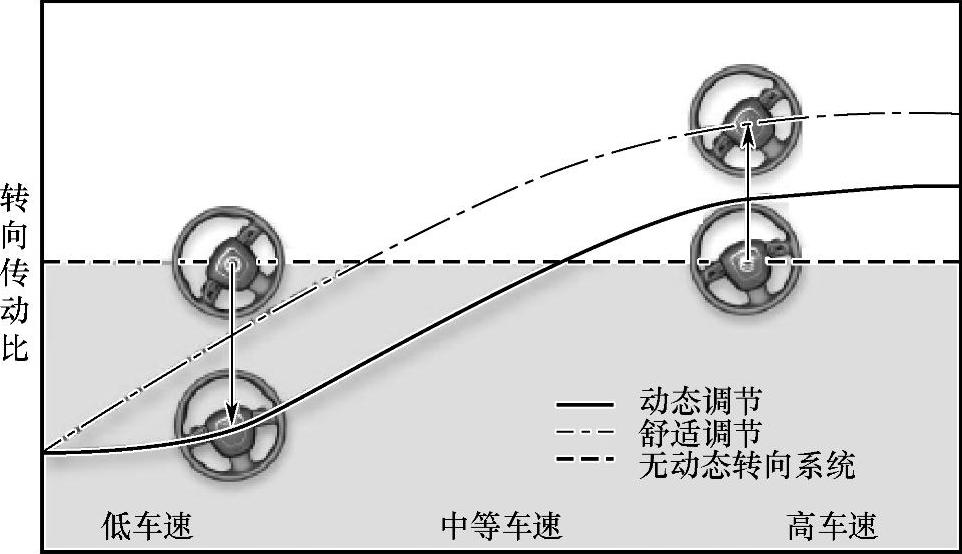
图4-54 转向传动比特性曲线
奥迪A4车上的动态转向系统一般可以实现两条可变的特性曲线,分别为舒适型的和运动型的,如图4-54所示,转向传动比和相应车速的关系可以很清楚地看出来,驾驶人可以选择自己所需要的特性曲线。
如图4-55所示,可变特性曲线是通过另加的一套电动机械式驱动装置来驱动转向齿轮而实现的,这套驱动装置与驾驶人的转向动力是并行存在的。在紧急情况下,比如这套驱动装置失灵了,那么转向系统仍可当成普通的转向系统来使用。
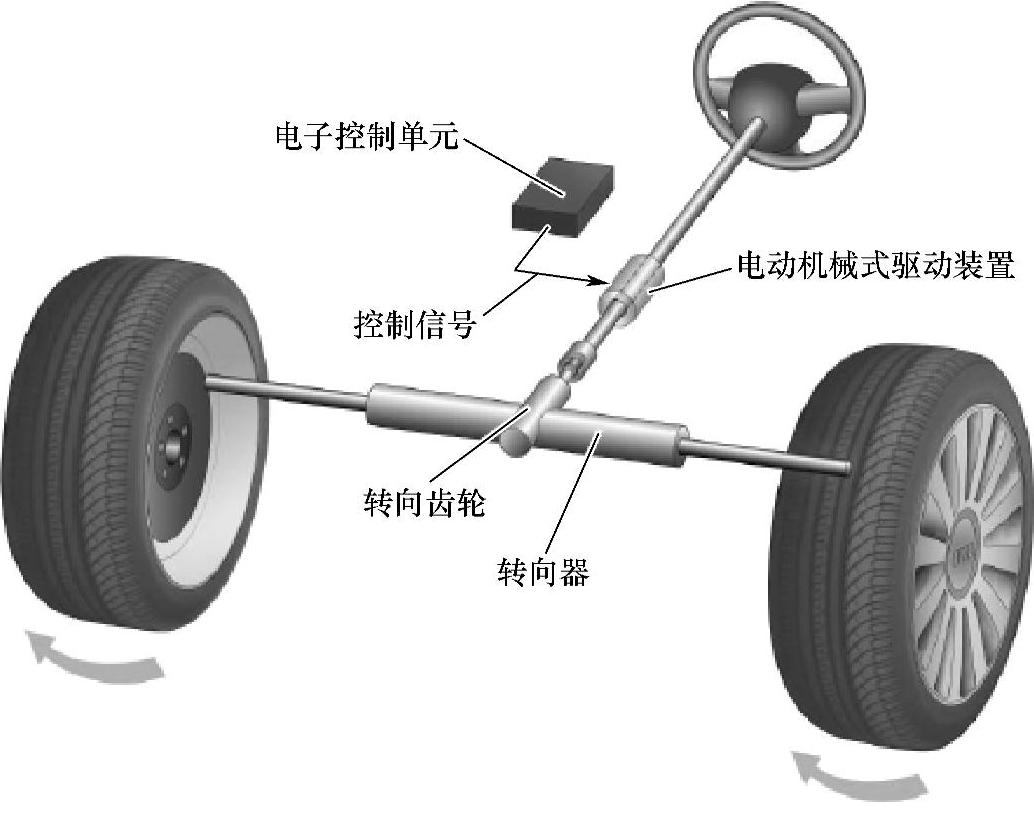
图4-55 奥迪A4车上的动态转向系统
动态转向系统的优点就更多了。与ESP及其传感器一同协作,该系统在危险的临界行驶状态时也会发挥作用。由于前轮回转大小可以有针对性地改变,所以动态转向系统在动态行驶的临界范围可以支持ESP的工作。因此,就产生了两个主要优点:
1)由于制动和转向同时介入,车辆的整体稳定性能得到了提高,也就是主动安全性明显提高了。尤其是在车速很高时(>100km/h),这个优点的作用更明显,因为在这种情况下,动态转向系统能充分展现出其快速反应的优点。
2)在少数极限行驶状况下,可以部分或完全放弃制动的介入,这可使车辆稳定过程更和谐、更舒适。与只通过制动介入来稳定的车辆相比,在低摩擦路面(比如雪地)上行时,驶使用动态转向系统的车辆通过减少制动介入,能更快地达到相同的稳定状态。在车辆过度转向和不足转向时,以及车辆在不同摩擦系数路面上制动时,ESP都可以获得动态转向系统的帮助。
1.过度转向的车辆
在车辆过度转向时,ESP与动态转向系统一同来稳定车辆。这个稳定过程是通过一个有针对性的反转向来实现的,这可避免车尾的“甩动”。
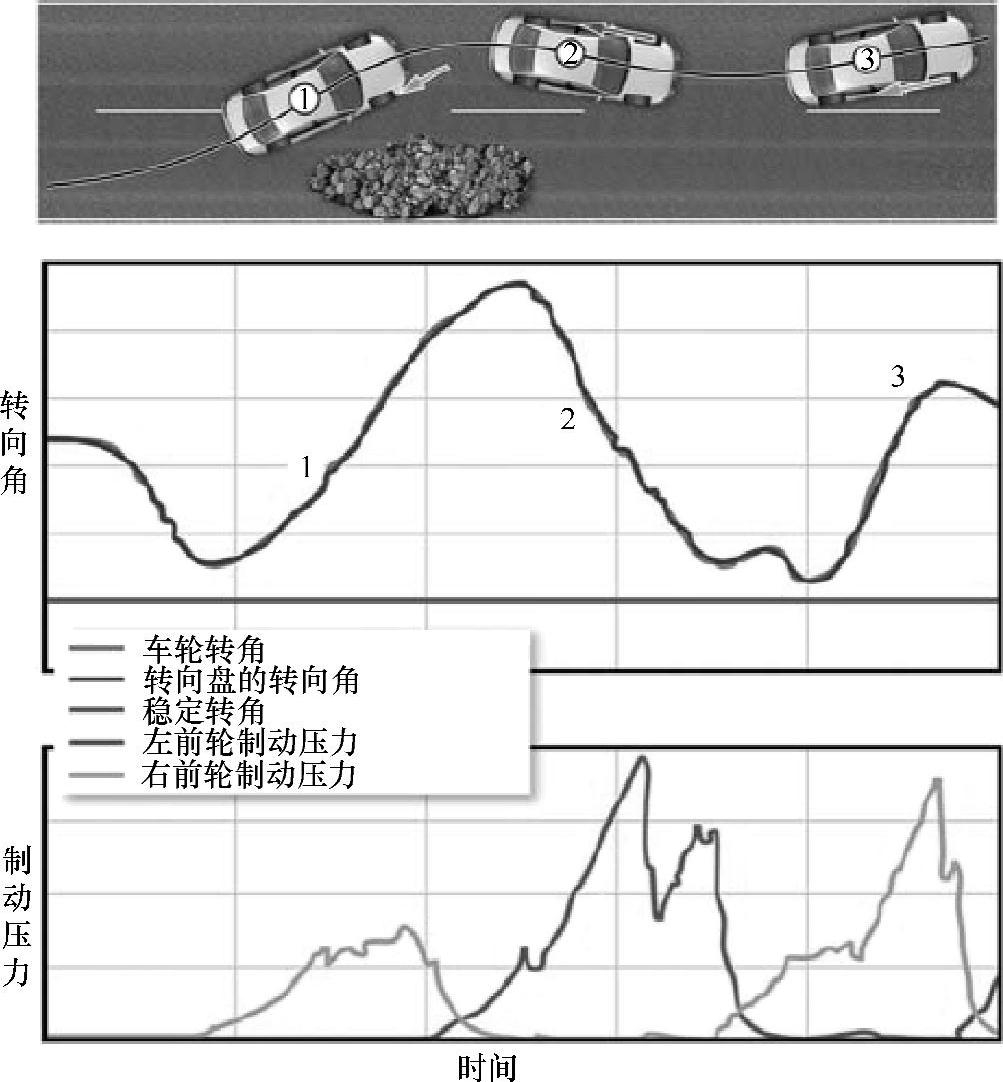
如图4-56所示,车辆容易进入过度转向的一个典型情形是车辆快速变换车道。在转回新车道时,车尾容易甩动(尤其是在车速很高时)。大多数情况下,驾驶人都是实施反转向过迟或者根本就没有实施这个反转向,这就导致ESP制动的强力介入。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-56 传统转向系统
如图4-57所示,使用了动态转向系统的话,这个反转向就可自动实现了,且驾驶人并没有注意到这个过程。因此,就可明显减轻驾驶人的转向疲劳,驾驶人只需在一般的稳定行驶状态来增加所需的转向角即可,ESP的制动介入也同样明显减少了。因此,在变道时,不但提高了车辆稳定性,还提高了车辆的穿行速度。
2.不足转向的车辆
如图4-58所示,在不足转向时,转动的前轮会迫使车辆驶向道路的外缘。在这种情况下,大多数驾驶人都是采用增大转向盘转角的方式来应对(车辆1)。因此,可用的侧向滑动阻力就更小了。轮胎和路面之间的静摩擦变成了滑动摩擦,转向失控,车辆滑离道路。在这种情况下,ESP也经常起不到帮助作用了。这种行驶状态的特点是尽管增大了转向盘转角,但侧滑阻力却降低了,由此导致转弯半径增大。
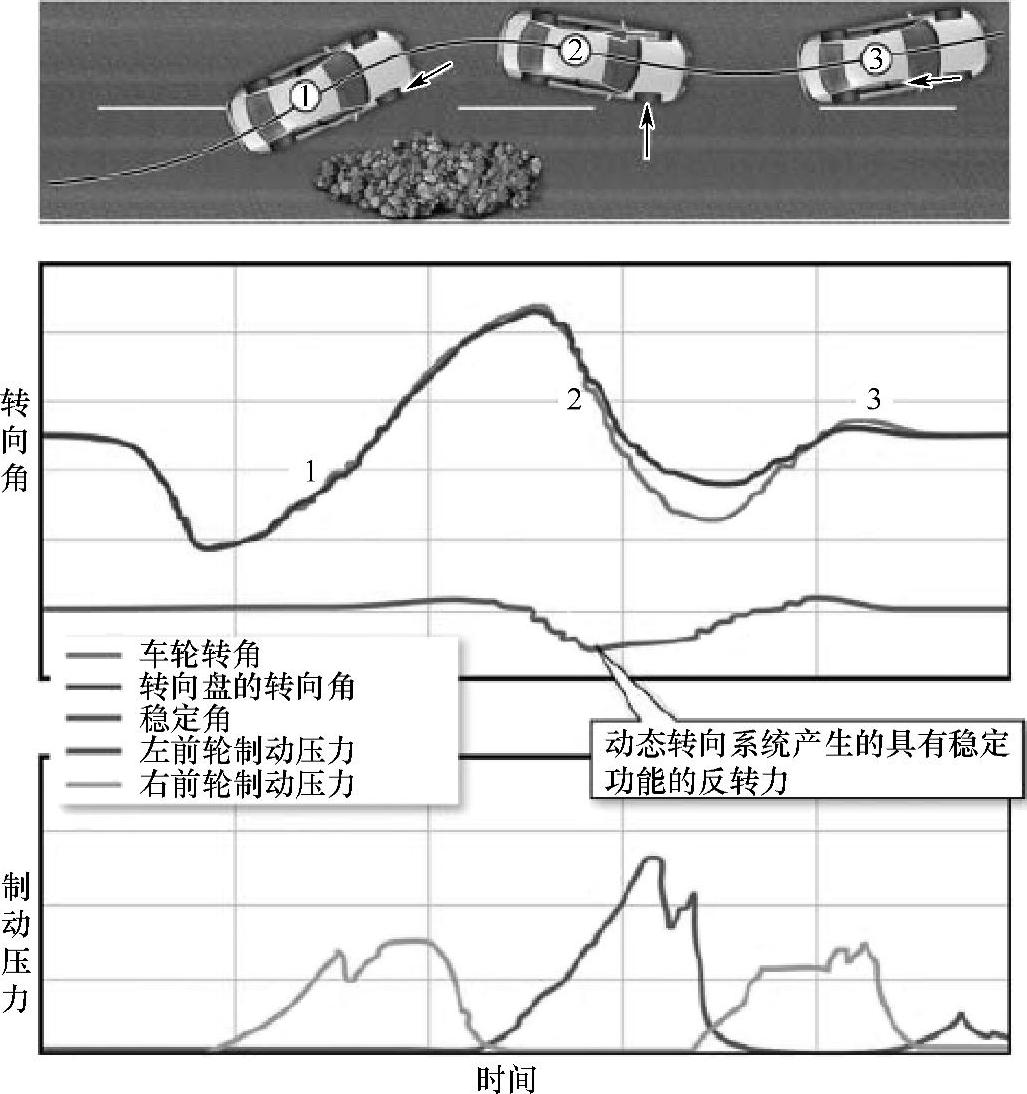
图4-57 动态转向系统
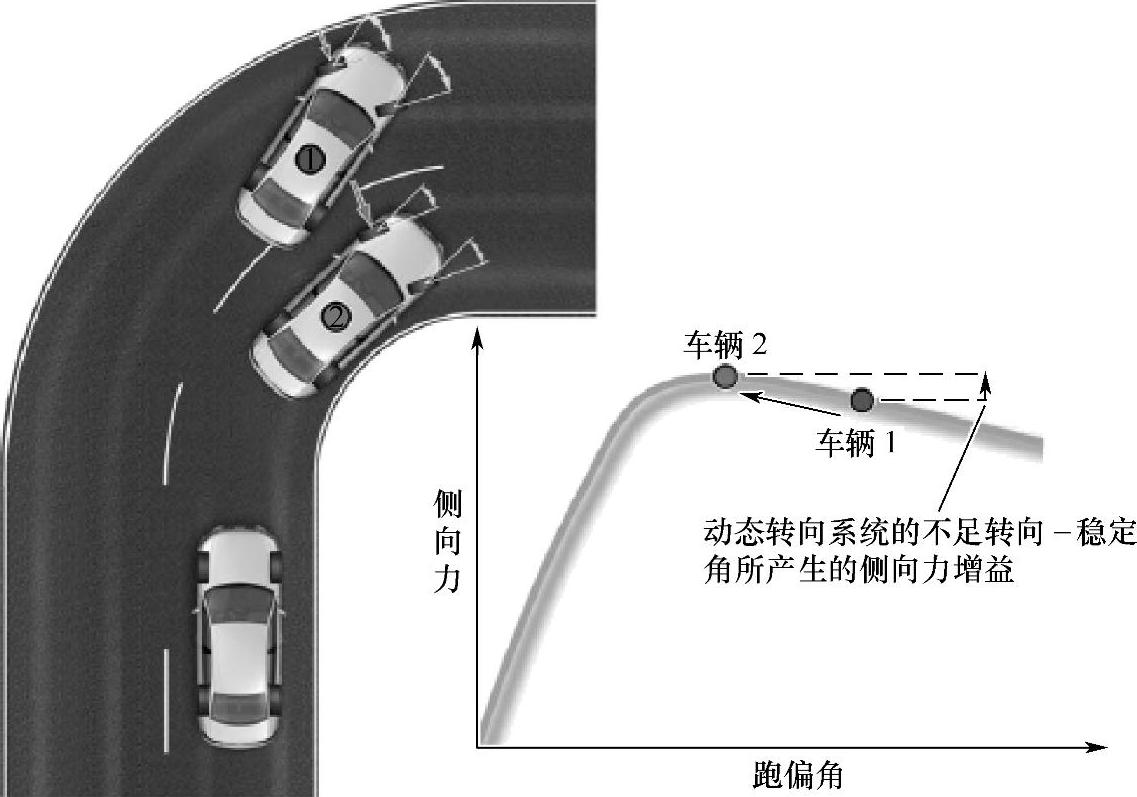
图4-58 不足转向状态示意图
如图4-58所示,当车辆还没有到达这个程度时,动态转向系统就开始起作用了。动态转向系统实施“反向控制”(车辆2)。车轮的实际回转角度小于驾驶人在转向盘上所要实现的回转角度。于是侧向滑动阻力就保持住了,车辆按最小转弯半径行驶。如果这个还不够的话,ESP会主要在转弯内侧车轮上实施制动。于是围绕着汽车竖轴线就另外产生了一个起稳定作用的反向力矩。于是车辆又被制动并转向到驾驶人期望的弯道上了。
3.不同摩擦系数路面上的制动
所谓不同摩擦系数的路面表面是这样的:车辆一侧的路面摩擦系数很大(比如是干燥的沥青路面),车辆另一侧的路面摩擦系数很小(比如有水或冰)。在这种路面上进行车辆制动,车辆就会向制动力大的一侧(摩擦系数大的一侧)偏滑。
如图4-59所示,要想继续向前行驶,在没有动态行驶系统的车上就由驾驶人来调整转向盘转角,以便补偿这个侧滑。对于装备有动态转向系统的车来说,ESP和动态转向系统的转角是自动来调整的。驾驶人并未感觉到转向盘保持在他所期望的行驶方向上。由于ESP和动态转向系统可以比驾驶人更快而准确地调节所需要的转角,那么在这种情况下,装备有动态转向系统的车就比未装备动态转向系统的车平均制动距离要短。
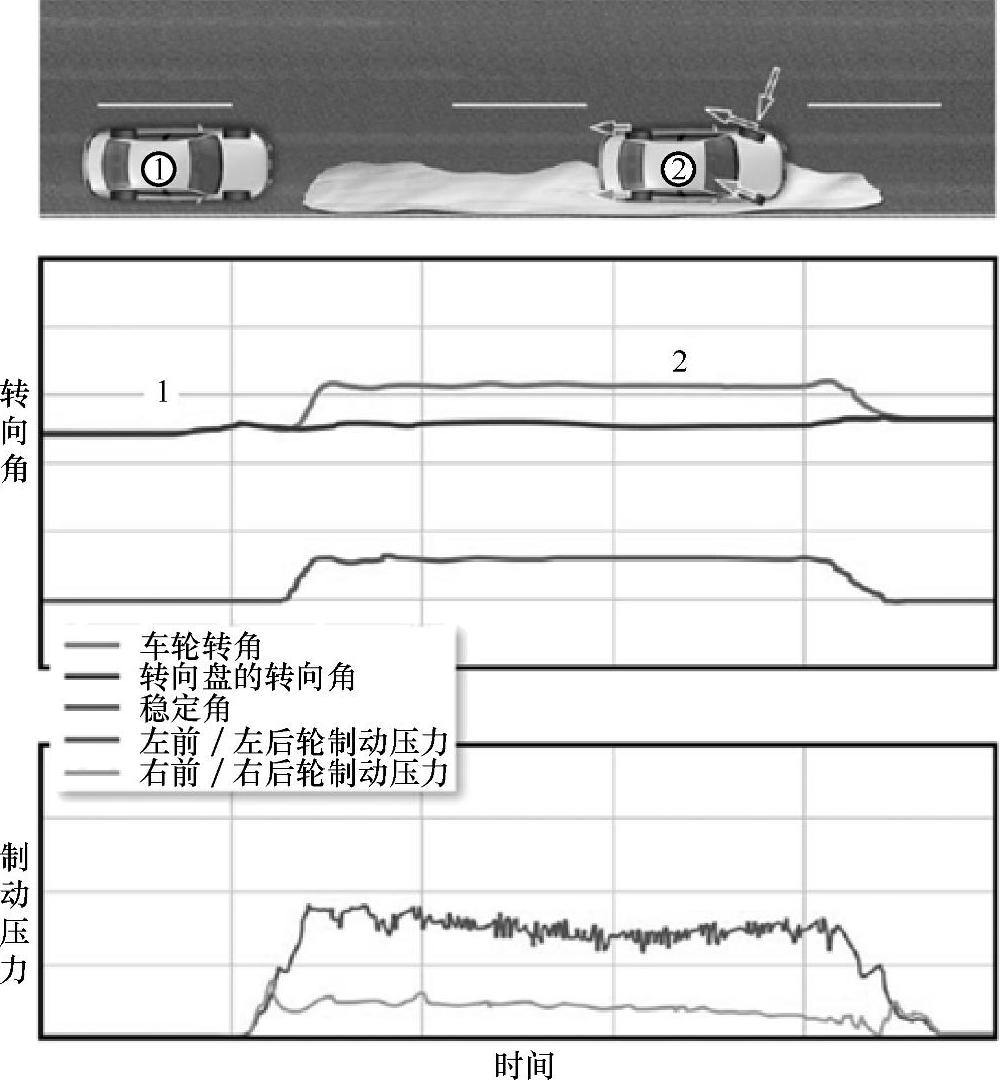
图4-59 不同摩擦系数路面上的制动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。