



5.2.2.1 汽车风窗玻璃电动清洁装置
为了保证在各种使用条件下,驾驶室的风窗玻璃表面干净、清洁,汽车上都装有风窗玻璃洗涤器和风窗玻璃刮水器。
1.风窗玻璃洗涤器
风窗玻璃洗涤器的功用是将清洁的水或洗涤液喷射到风窗玻璃上,在刮水器的作用下,清除风窗玻璃上的尘土和污物,使驾驶人有良好的视野。它主要由洗涤器电动机、洗涤器水泵、储液罐、喷嘴、水管等组成,如图5-10所示。
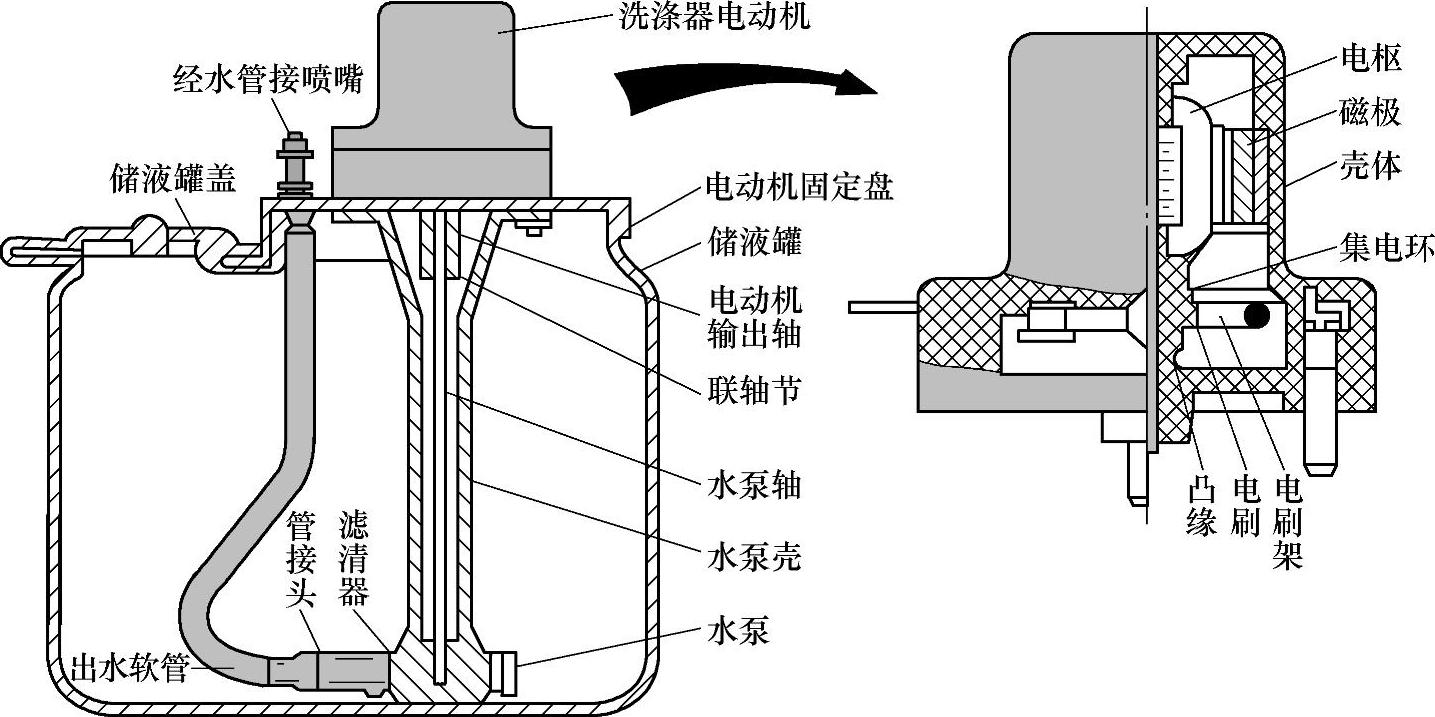
图5-10 风窗玻璃洗涤器结构示意图
2.风窗玻璃清洁装置
电动风窗玻璃刮水器如图5-11所示。
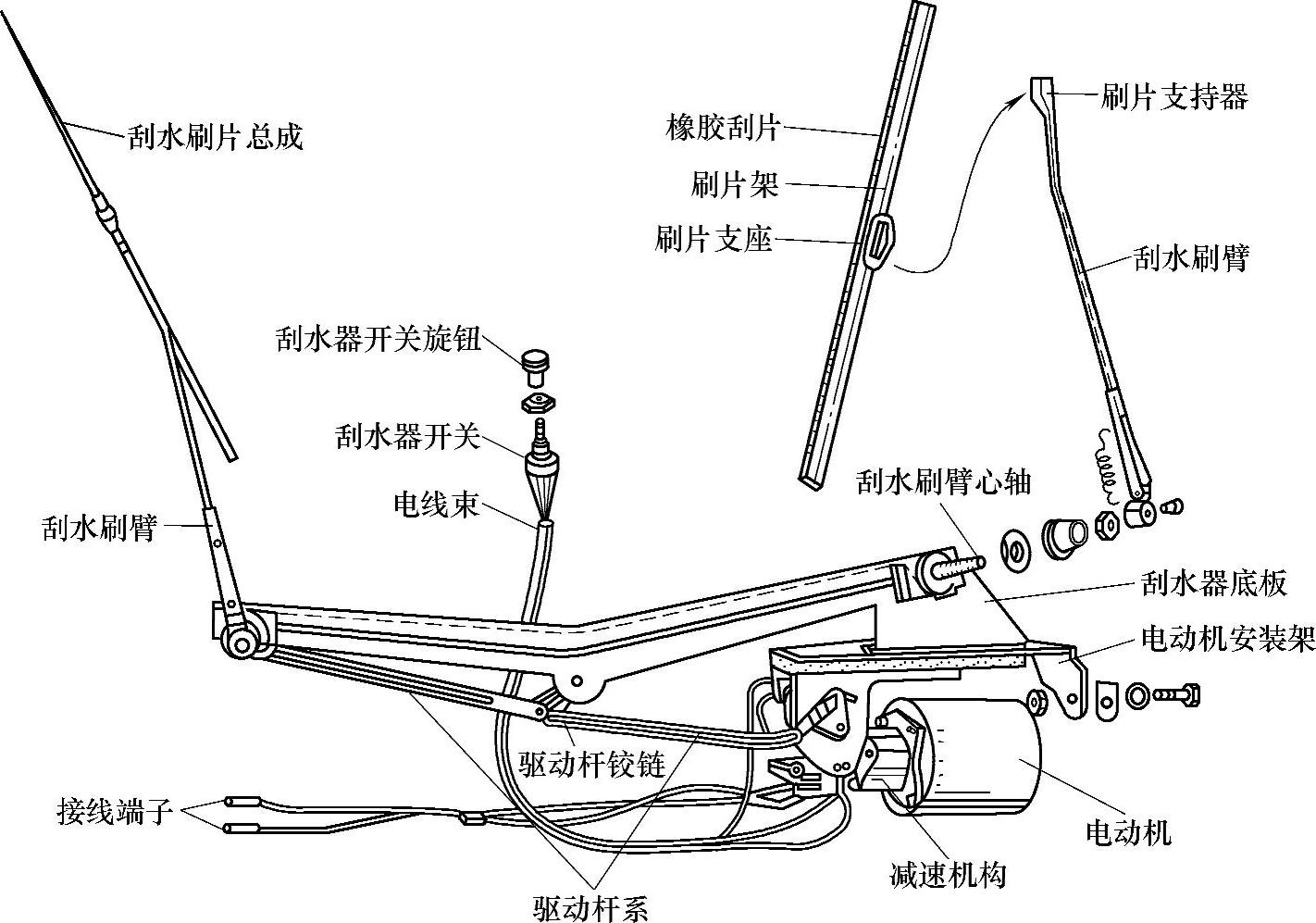
图5-11 电动风窗玻璃刮水器总成示意图
轿车风窗刮水器和洗涤器的工作都由刮水器洗涤器组合开关控制,组合开关有5个档位,分别是刮水器高速工作、刮水器低速工作、点动工作、间歇刮水、清洗玻璃。
刮水器电动机上装有一个由凸轮驱动的一掷两位停机自动复位开关,用来保证在刮水器停止工作后,刮水器的刮片停在风窗玻璃下沿的合适位置。
3.电动风窗玻璃刮水器的电路系统
电控电动风窗玻璃刮水器电路系统如图5-12所示。
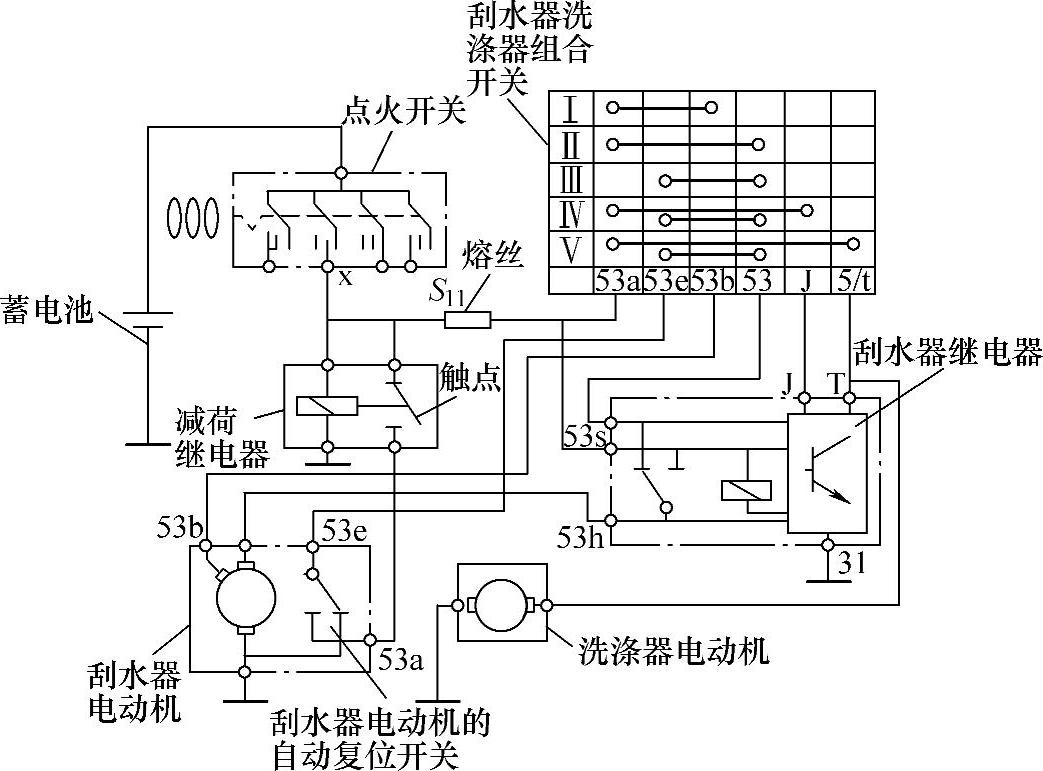
图5-12 轿车风窗玻璃刮水器电控电动电路简图
5.2.2.2 汽车防盗装置
为了防止驾驶人离开汽车后汽车被盗,汽车上都装有安全防盗装置。常用的防盗装置由以下几部分组成:转向锁、燃油切断装置、蓄电池接线柱断路装置、点火系统关断装置、各种电子报警器、各种外用机械防盗锁以及电子控制防盗系统等。以下我们介绍几种。
1.转向锁
转向锁安装在转向柱上,由点火开关控制。当驾驶人从点火开关上拔下钥匙时转向柱即被锁死,盗车者在不用钥匙起动发动机以后,汽车也不能驾驶。如图5-13所示为电控机电转向锁构成系统。
2.电子报警器
电子报警器通过电路控制喇叭鸣叫报警,可以更有效地防止他人私自进入车内,拆卸零件,起动发动机甚至盗走车辆。如图5-14所示。
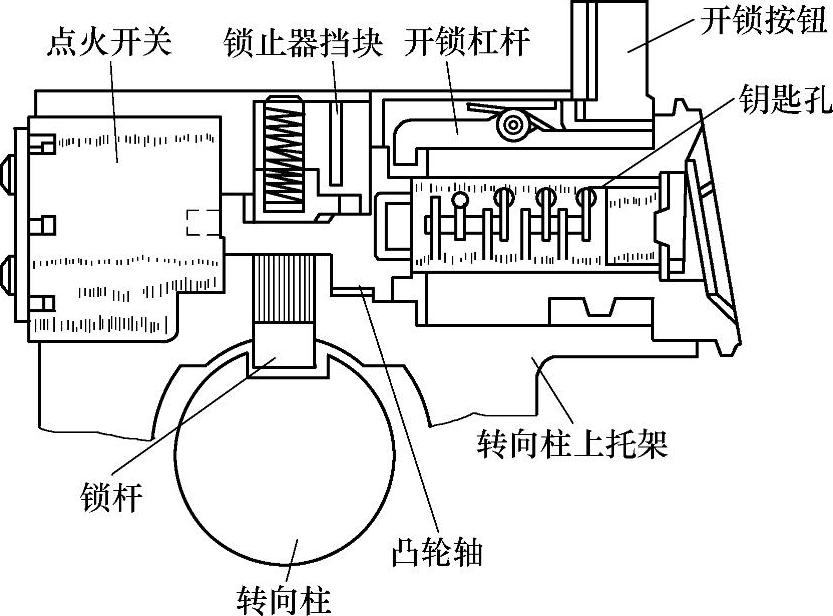
图5-13 转向锁系统示意图
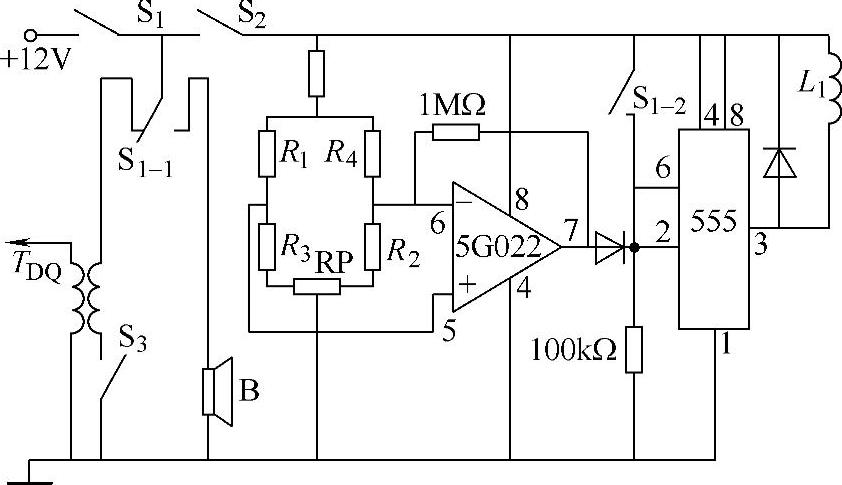
图5-14 电子报警器电路原理图
3.电控汽车整车配电系统
整车电路包含电源(汽车的电源有蓄电池、发电机)、保护装置(保护电路和用电设备不受额外电流的损害,如熔丝、电路断路器、易熔线)、控制器件(控制电路的闭合和断开,如手动开关、压力开关、温度开关、电子控制模块ECU等)、用电设备(电流使用电设备做功或发光,如灯泡、电磁阀、电子控制器件、空调、刮水器、音响设备、电喷、点火、导航等)、导线(将以上各种装置连接起来构成电路)等。如图5-15所示。
5.2.2.3 汽车导航系统
汽车导航除了确定自身位置和行进方向,避免在生疏地带或夜间行车时迷失方向外,还可引导汽车在繁忙交通状态和复杂的道路网络中选择最佳的路径,使其能在最短的时间和路程内到达目的地,以解决目前世界各大城市“有路行不通”的问题。
汽车导航系统根据是否具有引导功能,分为无引导功能的导航系统和有引导功能的导航系统;有引导功能的导航系统又根据是否接收全球定位信息分为自主导航系统和GPS(Glob-al Positioning System)导航系统;GPS导航系统又根据行车信息能否返回控制中心分为GPS开环导航系统和GPS闭环导航系统。
1.引导功能的导航系统
系统主要由显示器、人机对话装置、CD-ROM存储器、RAM、CPU等组成。该系统只是简单的电子地图,车主可以从CD-ROM存储器中调出本国主要城镇的方位、高速公路、主要干道、桥梁等交通信息,也可以通过人机对话装置方便地找到要到达的目的地以及行驶路线的各种信息,帮助驾驶人选择行车路线,但无引导功能。
2.自主导航系统
该系统利用内置的传感器确定车辆自身所处的相对位置和行驶方向,用数学分析的方法确定行车路径,并将该行车路径与内存电子地图上的道路进行比较,确定车辆在地图上所处的位置及到达目的地的方向和所余距离等,并在显示器上显示出来,从而起到导航和引导的功能。
自主导航系统除应具备上述无引导功能导航系统的装置外,还需配备距离传感器和方位传感器。自主导航系统根据所用方位传感器的不同分为地磁导航系统(利用地磁传感器测试汽车的行驶方向)和惯性导航系统(用陀螺仪测试汽车的行驶方向)。(https://www.xing528.com)
3.GPS导航系统
该系统除具有无引导功能导航系统的装置外,还配备一个较灵敏的GPS信息接收装置,可以接收到卫星发射的导航信息,经过计算机处理后,可以得到汽车行驶的方位、速度、到达目的地的直线距离和已经行驶的里程,并在显示器上显示出来。如果与电子地图结合起来,驾驶人可确切地知道自己在地图上的准确位置。
(1)GPS开环导航系统 该系统可从控制中心或电台、卫星传感器等得到车辆的定位、方向等信息,并通过与电子地图的配合确定行程起点到终点的最短距离,但汽车的信息不能返回控制中心,当汽车出现故障、被盗等问题时,控制中心无法获知,所以GPS开环导航系统不具备防盗、调度、工况监测和报警功能。
(2)GPS闭环导航系统 该系统除了具有开环导航系统所具有的全部导航功能外,驾驶人还可以把行车信息实时反馈给控制中心,控制中心也可以将其所掌握的交通、道路、气候等综合信息及时发送给运行车辆,使车辆在最短的时间内到达目的地,所以GPS闭环导航系统除具有导航功能外,还具有防盗、调度、工况监测和报警功能。
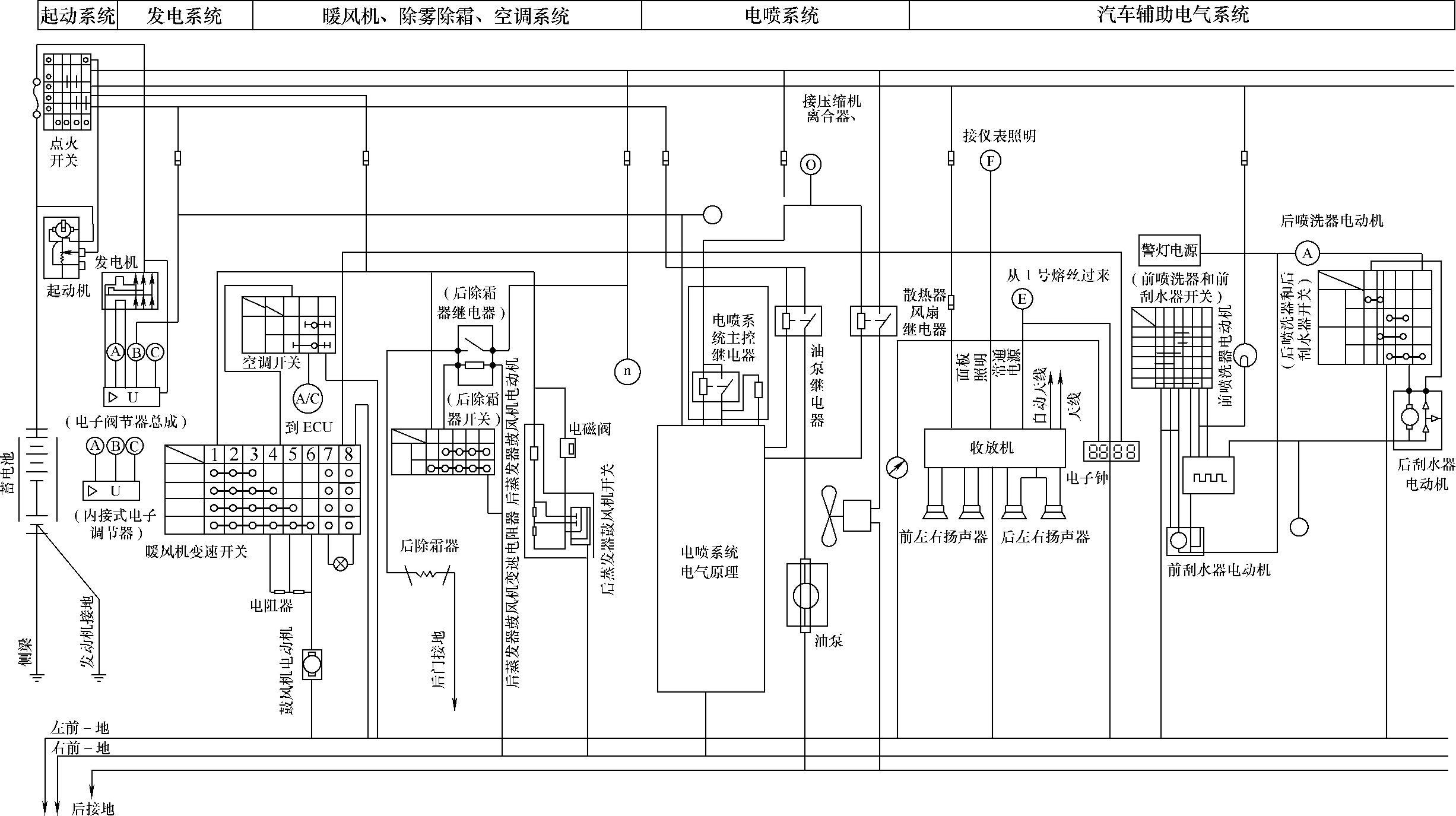
图5-15 某普通小汽车整车配电系统电路图
一、自主导航系统
1.距离传感器
距离传感器的种类很多,应用最多的是将汽车后轮的转速(转角)转变成距离的光电式、霍尔元件式或电磁式汽车距离传感器。
2.方位传感器
(1)地磁方位传感器 地磁方位传感器是一个双线圈发电机型地磁矢量传感器。由于上下线圈相位相反,所以垂直方向的磁感应电动势互相抵消。若用电动机转动线圈和铁心,则铁心中的磁通密度产生变化,从而建立起磁场,如图5-16所示。
(2)陀螺仪 喷气陀螺仪如图5-17所示。喷气陀螺仪是利用氮气的惯性检测方向,而不是利用地磁。密封在容器内的氮气在压电振子循环压缩机的作用下,在容器内循环。当汽车直线行驶时,氮气使两根热线均匀冷却,故两根热线温度相等。一旦汽车改变方向,氮气流由于本身的惯性而过分偏向一侧,使固定在汽车上的检测器的两热线冷却程度不等,结果产生温度差,并以电位差的形式表现。由于两热线构成电桥电路,故该输出电压即A、B两点间的电位差与汽车的偏转率成正比。
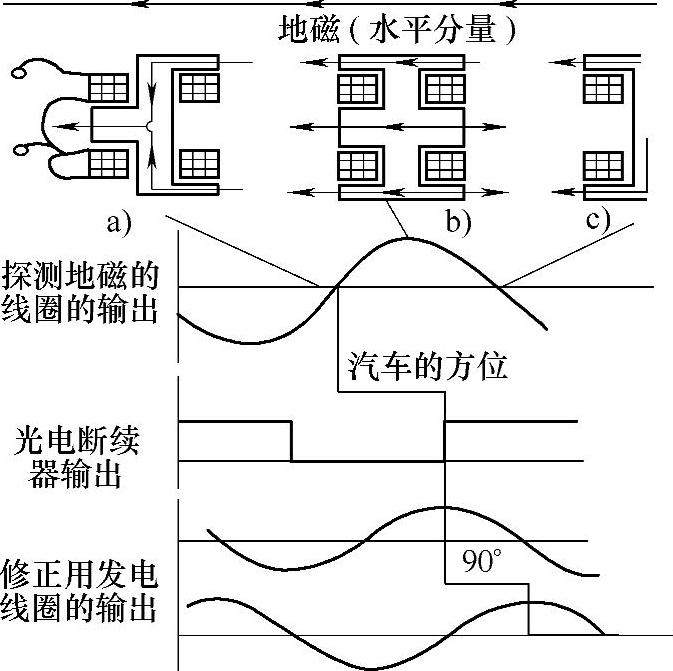
图5-16 地磁方位传感器感应工况示意图
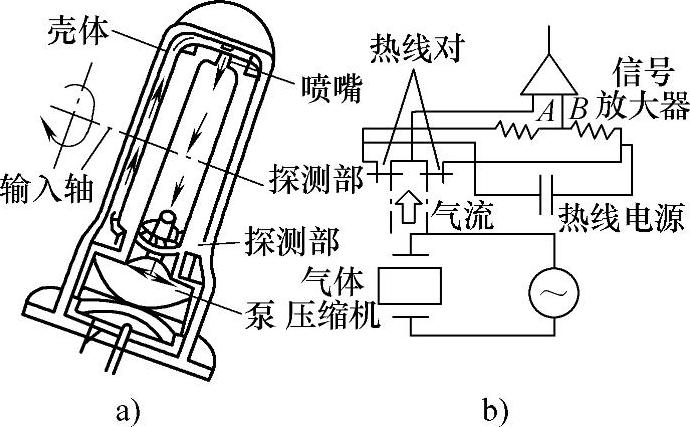
图5-17 喷气陀螺仪组成系统示意图
(3)光纤维陀螺仪 光纤维陀螺仪检测原理如图5-18所示,光从光纤线圈A点入射,经向左向右两个方向回转传播,光程相同时两方向同时经过一个周期到达输出的B点。当光纤线圈向右旋转的角速度为ω,则从A点入射的同一周期左右方向传播的光程不同,右回转比左回转传播光程长,两者相差一定角度。在原输出B点测量两方向传到的光相位不同,测定两个光干涉的强度,可以确定两方向光的传播时间差(相位差),从而计算出光纤线圈(汽车)的转向角速度ω。
二、GPS导航系统
1.空间卫星系统
空间卫星系统由均匀分布在6个圆形轨道平面上的24颗高度为20183km的导航卫星构成。如图5-19所示。物体(车辆)的位置通过测量电波由卫星至接收机的传播时间来确定,理论上当接收机接收到三颗卫星信号时,就可以测出载机车辆在地球上的位置。考虑到实际空间中存在着引起误差的因素,所以通过第四颗卫星来校正,提高导航定位的准确度。卫星导航系统是随着空间技术的发展而出现的一种空间基准的无线电导航系统。导航卫星在围绕圆形轨道运动时,发出事先决定的图像信息。接受侧根据卫星发出信号至接收到其反射信号的滞后时间,算出接收侧与卫星的距离R。以这个距离为半径,以卫星为圆心,就形成一个球面。当接收侧同时知道三颗导航卫星的距离时,就可形成三个球面,三个球面的交点就是接收侧的位置,也就是汽车的位置。
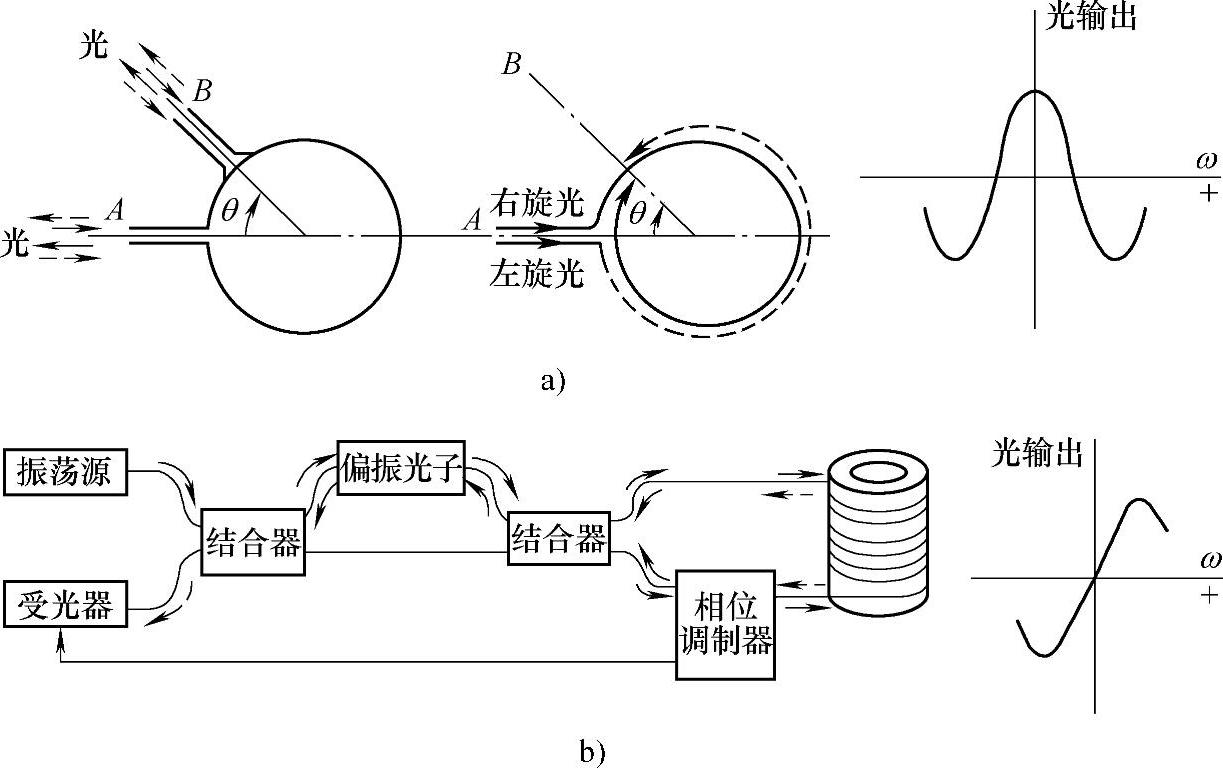
图5-18 光纤维陀螺仪检测原理示意图
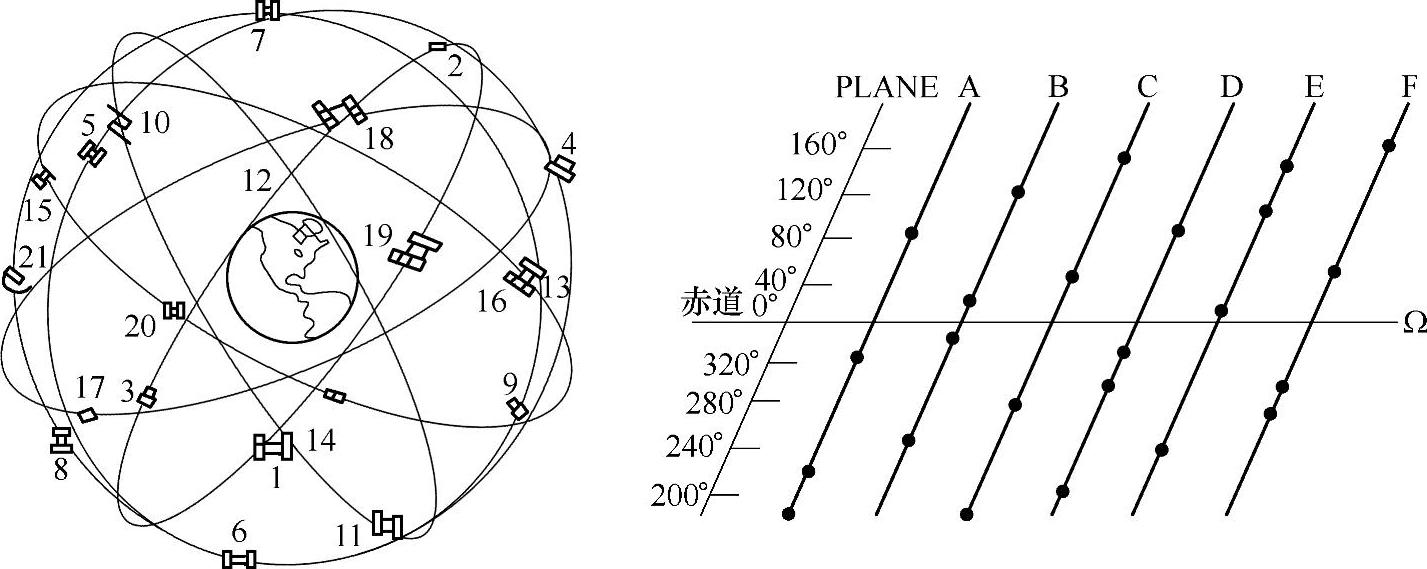
图5-19 空间导航卫星系统的分布状况示意图
2.地面监控系统
地面监控系统由1个主控站、3个注入站和均匀分布在美国本土和三大洋美军基地上的5个监测站构成。该系统的功能是对空间卫星系统进行监测、控制,并向每颗卫星注入更新的导航电文。
3.用户接收系统
用户接收系统主要由GPS卫星接收机和GPS数据处理软件构成。
4.汽车GPS导航系统
如图5-20和图5-21所示。
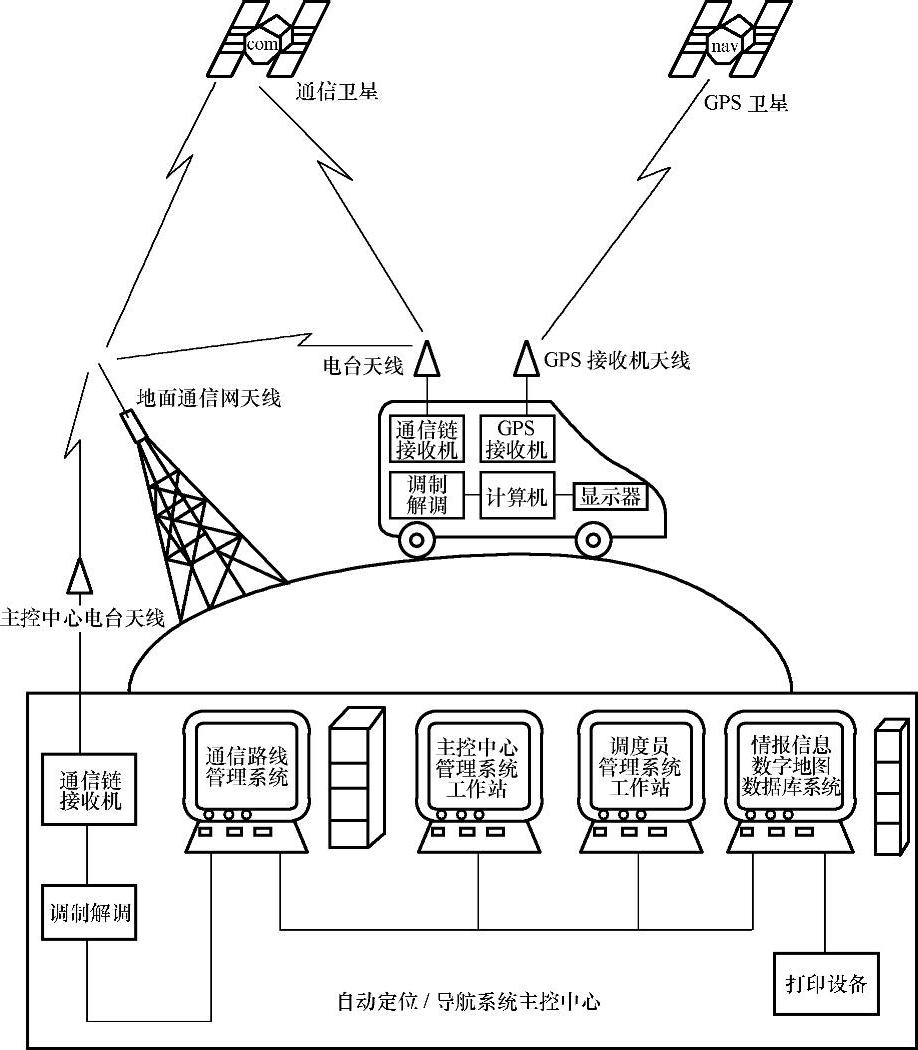
图5-20 GPS导航地面接收服务系统
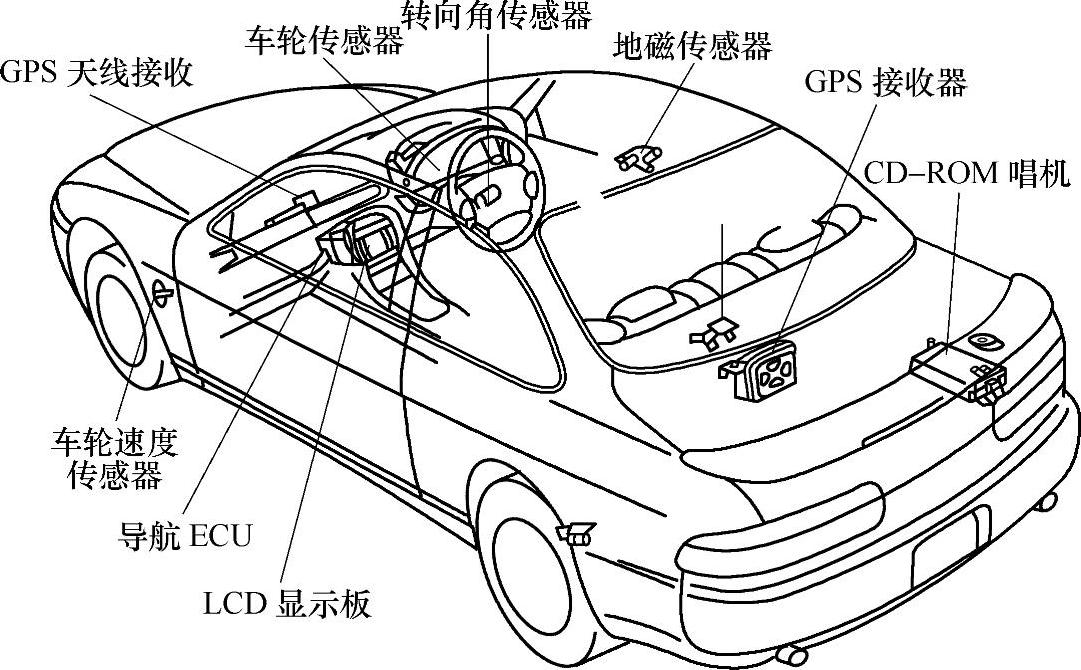
图5-21 汽车GPS导航接收系统示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。