



由于防抱死BBW AWB制动机电一体化控制系统的复杂性,以及对车辆行驶与操纵稳定性和可驾驶性及短停车距离的要求,用一个状态空间框图来表示制动控制算法,要比用一个经典的比例积分微分(PID)控制系统来表示更容易。
图3-35所示为单通道防抱死BBW AWB制动机电一体化控制系统的简化状态空间框图【CAGE 1994】。
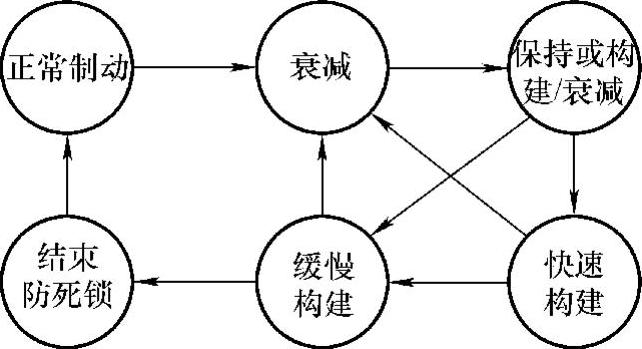
图3-35 简化的单通道状态空间框图【CAGE 1994】
在这个结构和功能框图中,汽车(未制动也未减速)会处于正常制动(NOR-MAL BRAKING)状态。如果防抱死动作是必要的,那是因为在某个给定通道的制动液压或气压已经引起车轮开始抱死;第一个动作是降低制动油液或空气(气体)压力甚至电气电压(DECAY状态),以让抱死车轮能够重新加速。制动液压或气压乃至电气电压的精密控制,由标为HOLD或BUILD/DECAY和SLOW BUILD的状态所表示,同时航向控制由FAST BUILD状态来表示。航向控制一般用在快速变化的路面条件期间,如冰到沥青路面的转变期间。在防抱死周期中,必要时状态可以改变,以获得制动液压或气压乃至电气电压的类型。图3-35所示为车轮角速度的变化情况【CAGE 1994】。
一旦对防抱死动作的需求结束,便进入END ANTILOCK状态,E-M-F泵或E-M-P压缩机断电,液压或气动阀断电,同时BBW 4WB制动机电一体化控制系统回归最初的NORMAL BRAKING状态【CAGE 1991,1994】。图3-36显示了这种状态空间方法的典型的微控制器流程图【CAGE 1994】。
在RESET和INITIALISATION之后,单片机进入一个MAIN循环中。MAIN循环分别包括大量的控制系统和ECU检查,以及车轮角速度值的计算、车速的预测、批准防抱死动作/状态空间控制规则的分析,还有液压或气动阀及E-M-F泵或E-M-P压缩机驱动。(https://www.xing528.com)
车轮角速度值的计算包括缩放车轮角速度传感器输入至一个更加可用的形式,从而很可能过滤掉由轴偏转(如果有)、制动尖叫、其他电气/电子系统等带来的噪声。一个考虑是车轮加速度和减速度的带宽是相当大的,可能达到50g【CAGE 1994】。
与车速相关的车轮角速度,以及车轮滑转,可以作为判断射流阀动作的一个因素,因此,对于很多控制系统而言,车速预测是至关重要的。因为传感器可能不再是车速的可靠指示器,所以一旦车轮开始抱死,车速预测将变得困难。用来预测车轮已经开始抱死时的车速的方法由一套规则组成。规则由防抱死厂商通过多年的经验而开发,也确保对真实车速的预测有一个较高的精度。
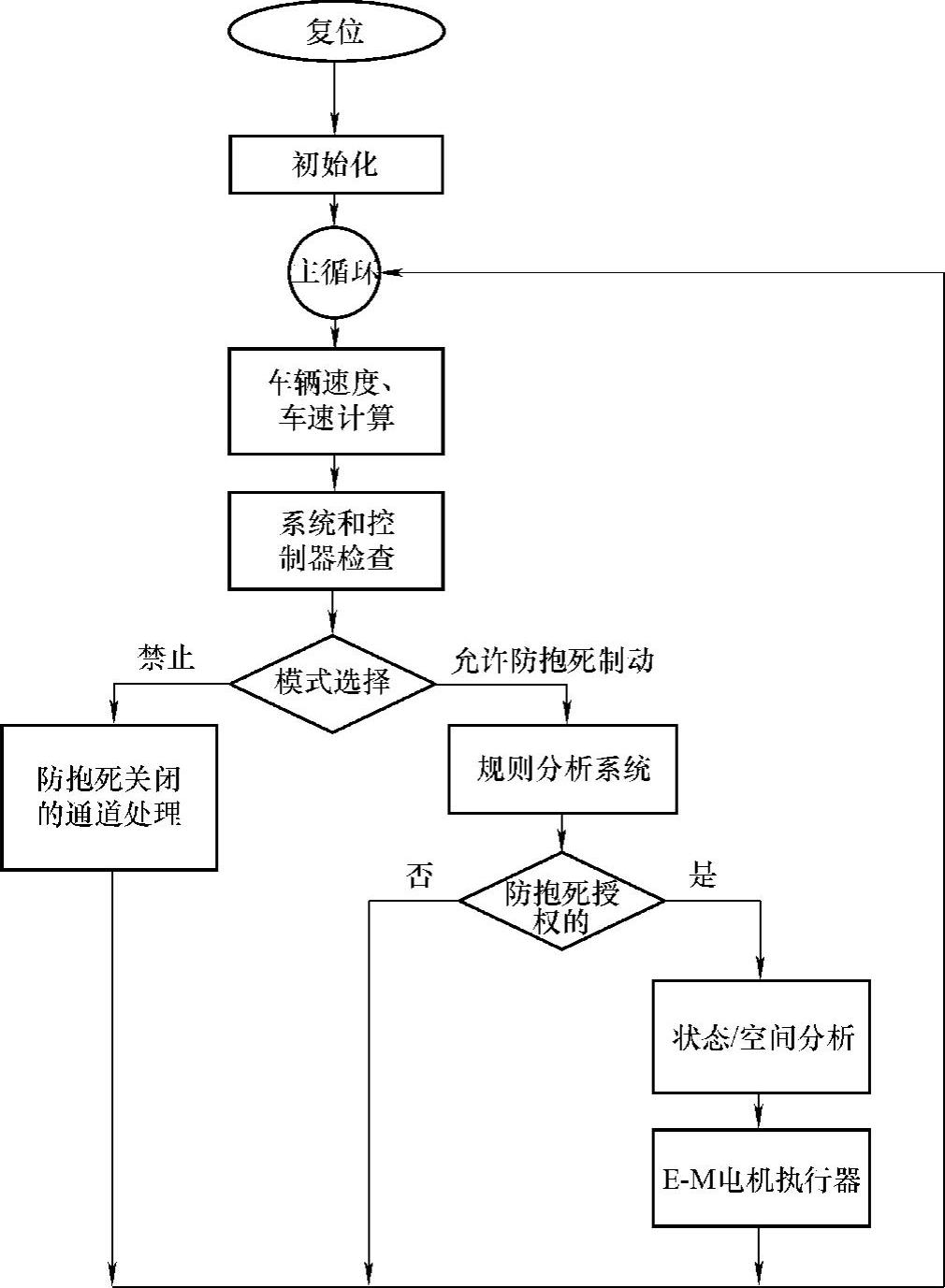
图3-36 简化的防抱死流程图【CAGE 1994】
防抱死BBW AWB制动机电一体化控制系统检验部分,通常由传感器和射流阀/E-M-F或泵气动阀/E-M-P压缩机导通测试,还包括电能量系统电压范围测试。此外,检验通常包括内部ECU的测试,如微控制器间的通信。一旦确定条件就是防抱死动作能够在必要时安全调用的那样,就分析车轮角速度条件,为那个通道建立合适的状态。另一个考虑的因素是,如果命令了某个特定状态是否会对汽车操纵稳定性造成影响。液压阀或E-M电动机执行器的动作体现了分析/状态逻辑结论的直接结果。不同于需要脉宽调制(PWM)驱动的执行器,防抱死系统的执行器一般会保持在命令(commanded)状态,直到单片机再次执行代码,这通常是几秒钟的时间。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。