



从用于x轴纵向应用的牛顿第二定律,可以得出动态制动性能的一个欧拉-拉格朗日(Euler-Lagrange)二阶微分方程式。指定方向上作用在车身的外力之和等于该方向上车身质量和加速度的乘积。
将该定律与直线汽车制动联系起来时,在公式(3.3)中给出了其中的重要因素,同时在图3-6中图示了作用在车辆上的力的总和【WONG 1978;GILIESPIE 1992】。
∑Fx=mvax=mvdx=Fxf+Fxr+Dxa+mvgsinθ+frmvgcosθ (3.3)
式中 mv——汽车的质量,kg;
ax——线性纵向向前加速度,m/s2;
g——线性重力加速度,m/s2;
dx=ax——线性纵向向前减速度,m/s2;
Fxf——前轮制动(FWB)力,N;
Fxr——后轮制动(RWB)力,N;
Dxa——空气动力阻力(被认为作用在某一点),N;
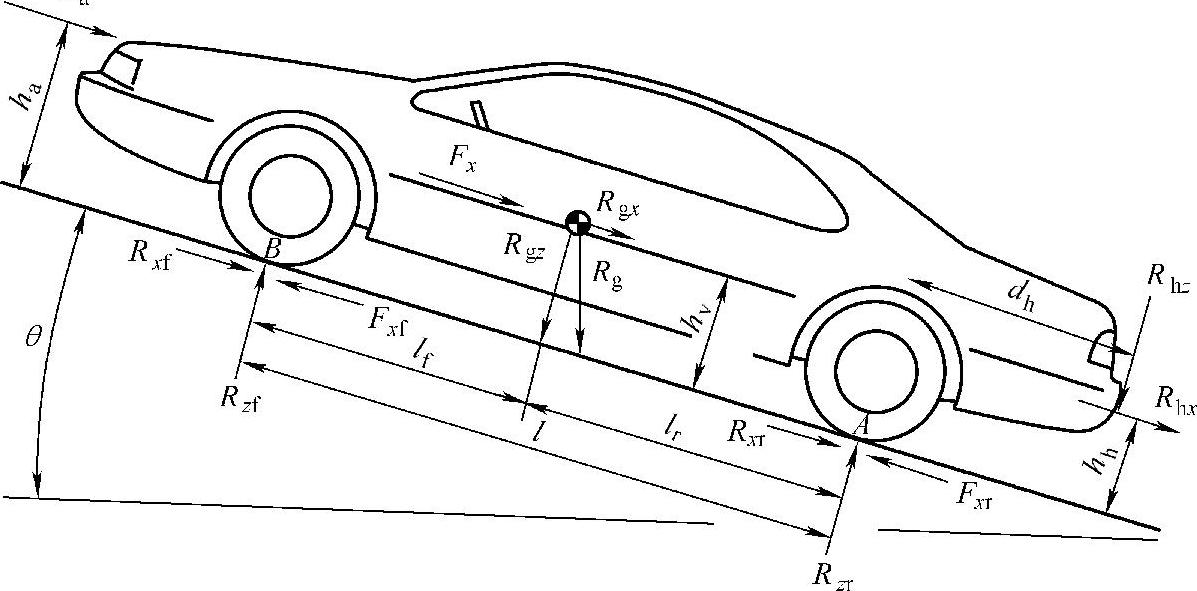
图3-6 作用于一辆汽车上的任意力【GILLESPIE 1992】
fr——滚动阻力系数,fr=(Rxf+Rxr)/mvgcosθ;
θ——上坡坡度(公路/越野路面倾角),rad。
制动器转矩,连同滚动阻力影响、轴承摩擦和传动系阻力,可以得到前制动和后制动力表达式。一个减速度的绝对分析需要作用在车辆上的所有这些力的全面知识。
恒减速度:可以从这种情况,即有理由假定作用在车辆上的力在一个制动期间可能是恒定的情况中,获得一个简单和基本的关系。简单的公式提供了控制制动操纵的一个有用的基本关系。

式中 Fxt——汽车上所有纵向减速力的总值,N;
v——先前车速的瞬时值,m/s;
t——时间瞬时值,s。
对一个从车速初始值V0到车速最终值Vf的减速度,这一公式能够进行积分(假定Fxt为常数)。

图3-5 各种公路/越野路面上的库仑(Coulomb)摩擦与轮胎滑动百分比【RACELOGIC;THOMAS 1998】
式中 ta——车速改变时间,s;
V0——车速初始值,m/s;
Vf——车速的最终值,m/s。
如果假定摩擦制动力为常数,并且忽略在气动阻力和滚动阻力上的车速影响,那么一个车速改变的时间可以从牛顿第二定律导出【GILLESPE 1992】:

由于速度与距离使用v=dx/dt相关联,替代公式(3.4)中的积分,从而得到车速和距离之间的关系:

式中 xa——减速时在纵向向前方向的行驶停车距离,m。
车速改变期间的行驶距离也能够从牛顿第二定律中导出【GILLESPIE,1992】:

这些近似值表明停车时间与车速成正比,同时停车距离与车速的平方成正比。在减速是一个完全停车这种情况下,此时Vf=0,其中xs为停车距离,则

同时停车时间如下:

式中 ts——停车时间,s。
因此,在其他条件相同的情况下,停车时间与车速成正比,尽管事实是停车距离与车速的平方成正比。也就是说,车速加倍会使停车时间加倍,但会使停车距离增加至4倍。
用风阻力减速:车辆上的气动阻力取决于车辆阻力因子以及车速的平方。为了确定这种情况下的停车距离,必须要有一个更加复杂但依然可以积分的公式。因为:
∑Fx=Fb+Cav2 (3.12)
式中 Fb——总的前轮和后轮制动力;
Ca——气动阻力因子。(https://www.xing528.com)
所以:

这可以通过积分来获得停车距离:

制动机械能和/或功率:在一个典型的最大努力停车期间,制动系统吸收的机械能和/或功率可以是很大的。吸收的机械能是车辆运动的机械动能,因此与质量有关:

制动功率吸收可能与车速有关,在任何时刻与制动力乘以车速相当。
因此,制动功率损耗在最高车速时的停车开始点最高。
在整个停车上面,平均制动功率吸收可能是制动机械能除以停车时间。从而:

制动功率计算是来自一个制动系统所需的满意性能的角度来说的信息。
动态车辆质量转移:在制动期间,发生的动态车辆质量转移是一个重心高度、汽车静态质量、轴距和加速率的函数。公式(3.17)描述了这一动态车辆质量转变,即

式中 mvd——汽车的动态质量,kg;
mvs——汽车的静态质量,kg;
hv——车辆重心高度,m;
ha——气动阻力中心高度,m;
l——汽车轴距,m。
制动比例:一辆汽车上可达到的制动减速度,就是其中一个FWB或RWB轴上可能发生抱死的点之前应用级别和制动收益(转矩/压力或转矩电压)的产出。制动抱死会减少制动力,并造成控制车辆能力的一些损失。
人们认识到优选设计是将FWB和RWB轴双双同时带入抱死点。但是,对于在一辆汽车可能面临的整个工作环境范围上而言,这是不可能做到的。
对FWB和RBW轴上的制动器输出的平衡,是通过对安装在车辆上的主制动器的液压或气压或者电压进行适当配比来实现的。
先是配比,然后根据可能的牵引力峰值调整在前轮和后轮的制动转矩输出。
在一根FWB或RWB轴上的牵引力峰值的一阶行列式是瞬时质量和摩擦系数的峰值。
在制动期间,一个从RWB轴到FWB轴的动态车辆质量转移(转变)发生,这样在FWB或RWB轴上的车辆质量是静态质量加上分摊的动态车辆质量转移。
因此,对于减速度dx:

式中 mvfs——前轴静态车辆质量,kg;
mvrs——后轴静态车辆质量,kg;
mvd——动态车辆质量转移,mvd=(hv/l)mvdx,kg;
l——汽车的轴距,l=lf+lr;
对于FWB和RWB汽车,在制动期间,这一车辆质量转移对前轮为正,而对后轮为负,分别如式(3.18)和式(3.19)所示:

式中 Fxfmax——前轮上纵向向前方向的最大摩擦力,N;
Fxrmax——后轮上纵向向前方向的最大摩擦力,N;
μxp——库仑(Coulomb)摩擦系数的峰值;
mvfs——前轮上的静态质量,kg;
mvrs——后轮上的静态质量,kg。
对θ=0的情况简化公式(3.3),并忽略气动阻力和滚动阻力,结果如下:
∑Fx=mvdx=Fxf+Fxr
求解d并在简化的公式(3.20)和公式(3.21)中替代,可导出式(3.22)和式(3.23):
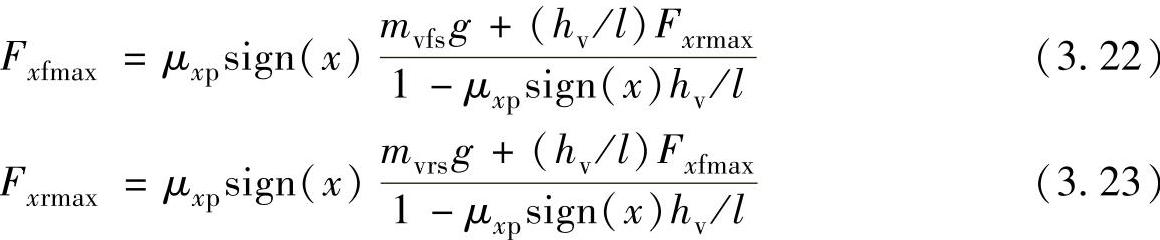
这些关系表明,在减速中,前轮最大制动力取决于后轮制动力和向前的质量转移;同样,后轮制动力取决于前轮制动力。通过前面的公式应用,BBW AWB制动机电一体化控制系统的设计者能够确定实现期望减速而所需的总制动力,并且可以设定该制动机电一体化控制系统元件的尺寸。安全和法律要求迫使BBW AWB制动机电一体化控制系统设计师考虑这些情况或情形下的减速,比如,满载和未满载车辆;部分失效的BBW AWB制动机电一体化控制系统;整个BBWAWB制动机电一体化控制系统的半系统故障或失去制动助力。出于这些考虑以及其他的很多问题,比如顾客制动踏板行程和踏板力/减速度期望值,使得对车辆BBW AWB制动机电一体化控制系统的定型是一个复杂的工程,一般是借助一个汽车模拟计算机程序来完成的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。