



制动操纵期间在汽车每个车轮产生的纵向摩擦制动力,是由车轮上的正向力(normal force)和轮胎与公路/越野路面之间的摩擦系数决定的。在车轮上的质量和合成纵向摩擦制动力之间的关系见式(3.1)。

式中 Fx——在x轴纵向的合成摩擦制动力,N;
μx——在x轴纵向的轮胎至公路/越野路纵向库仑(Coulomb)摩擦系数;
mw——车轮的静态和动态质量,kg;
g——重力加速度,m/s2;
x——在x轴纵向的位移,m。
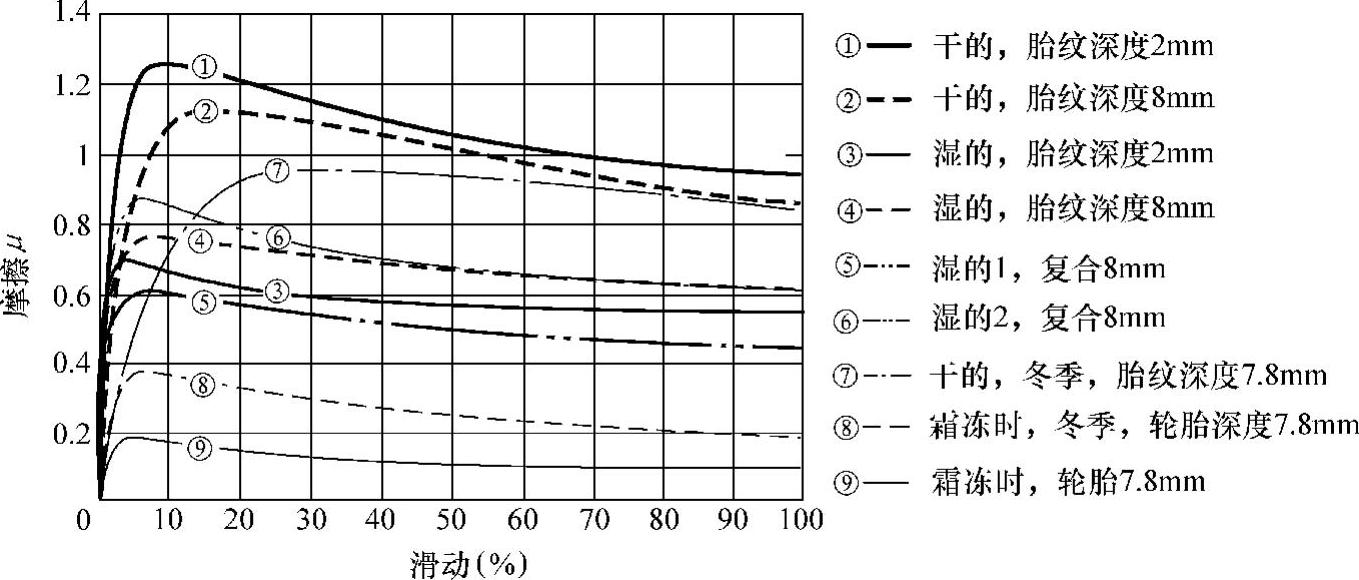
轮胎至公路/越野路纵向库仑摩擦系数不是一个常量,而是基于一些因素,众所周知的是一种公路/越野路面以及轮胎与公路/越野路之间的比较纵向滑移。图3-5所示为在不同公路/越野路面上的轮胎滑移时,轮胎至公路/越野路纵向库仑摩擦系数【THOMAS 1998】。
从图3-5和公式(3.1)中,包括了如下的表述【THOMAS 1998】:
• 纵向摩擦制动力的存在取决于轮胎滑移。如果轮胎在以和公路/越野路面相同的切向速度滚动,那么此时不存在纵向摩擦制动力。在好的制动中这种关系是至关重要的,并且不容易看到,不用机电一体化装置很难发现除接近100%(没有轮角速度)的轮胎滑移。
• 纵向摩擦制动力的峰值发生在相对小的滑移的情况下。这说明,受一个熟练驾驶人的影响或由于ABS有一种在几乎全部的公路/越野路面上呈现更短停车的趋向,发起一个100%滑移的摩擦FMB、PMB、EFMB、EPMB或EMB粗暴应用一般不会分别产生最大摩擦制动力和均匀调制、受控的制动液或空气压力,或者制动电压。(https://www.xing528.com)
• 建立的纵向摩擦制动力随不同的公路/越野路面而明显不同;如果干沥青制动与在冰上的制动进行对比,这种关系带来的效果对驾驶人和乘客非常明显,表现在停车距离和加速度上。
• 通常,超过在一个指定公路/越野路面上可达到的摩擦系数峰值,曲线的斜率变成负数;这一明显的事实(超过引起摩擦制动力峰值的滑移,附加的制动踏板力引起较少的制动),解释了为什么熟练的驾驶人比不太熟练的驾驶人能够获得更短的停车距离,也解释了一个机电一体化控制的ABW BBW制动机电一体化控制如此复杂的原因。同时,在摩擦系数曲线中的“峰值”的数量随不同的公路/越野路面而显著改变。由于在公路/越野路面上(如在冰面而不是在干沥青上)的打滑控制,纵向摩擦制动力中的附加增益可以得到。
汽车橡胶轮胎的一个附加功能,是相对于轮胎滑移的横向摩擦制动力。
横向摩擦制动力是一个力,该力防止一个轮胎在一个垂直于车辆方向的方向滑动。
合成横向摩擦制动力的公式为

式中 Fy——在y轴横向的合成摩擦制动力,N;
μy——在y轴横向的轮胎至公路/越野路横向库仑(Coulomb)摩擦系数;
y——在y轴横向的位移,m。
一旦轮胎开始纵向打滑,横向库仑摩擦系数减小,这在制动期间是很常见的。由于相对小的横向摩擦制动力使车辆后轮容易横向打滑,使得在车辆后轮产生太大的轮胎滑动以及由此产生的横向摩擦制动力损失,从而造成不稳定性。在车辆前轮太大的轮胎滑动和由此产生的横向摩擦制动力损失,会带来可操纵性损失。由于一个硬的摩擦FMB、PMB、EFMB、EPMB或EMB应用将橡胶轮胎置于100%滑动,这种现象在像冰面一样的低横向系数公路/越野路面上的恐慌停车期间经常出现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。