



并联式HE变速器装置由ECE/ICE和机械齿轮连接的电推进组成。电推进采用E-M/M-E电动机/发电机、ECU和CH-E/E-CH蓄电池建成。机械齿轮通过M-M差速器驱动车轮。在高速公路中行驶,ECE/ICE驱动HEV,并给蓄电池充电。在城市中驾驶时,蓄电池和E-M电动机驱动HEV。在爬山或当需要最大输出功率时,ECE/ICE和E-M电动机双双驱动HEV。这一变速器装置,带来了更佳的效率、更轻的质量和更低的成本。在并联式HE变速器装置中,ECE/ICE以及E-M/M-E电动机/发电机能独立地或同时地驱动或制动HEV。
在城市交通中,配备HE 2WS DBW驱动控制系统的并联式HE变速器的汽车主要是电动的,但如果需要更高的功率,则ICE会接管。
辅助电机的工作以很小的舒适性或车上行李空间的损失完成。
嵌入式的代替传统ICE的飞轮的,是一个紧凑的DC-AC宏换向器次同步鼠笼式转子飞轮E-M电动机。在ICE的一侧,以及MT/SAT/CVT的一侧,安装了机电一体化驱动的M-M离合器。E-TMC系统作为起停(Stop-Start SS)离合器工作。
在图2-132中图示了驱动E-M电动机,同时在图2.133中图解了运行原理。
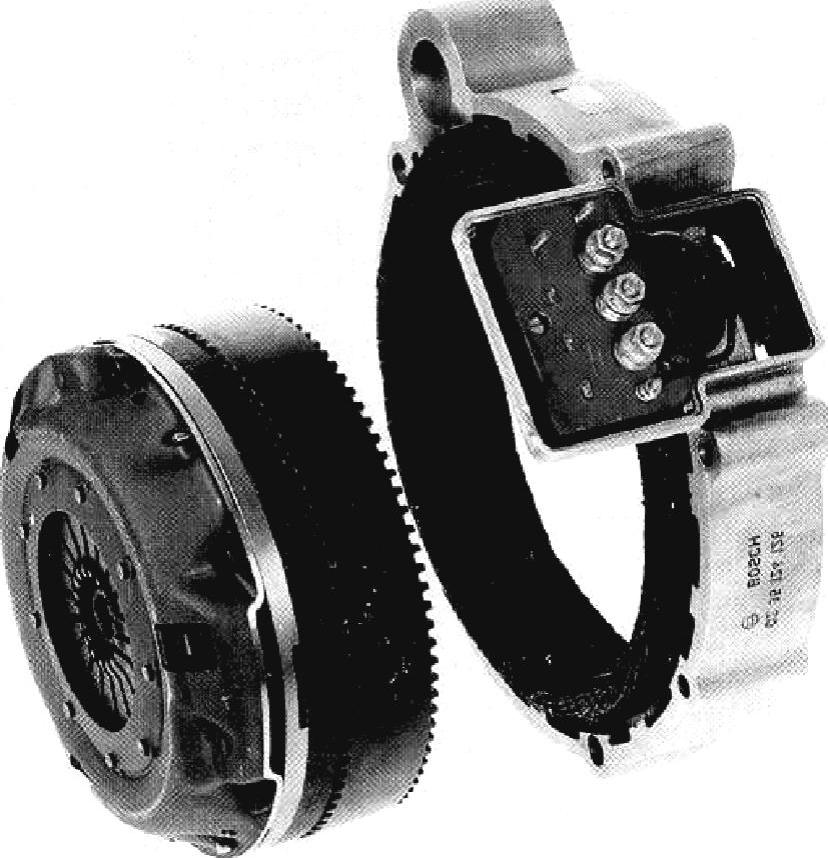
图2-132 包含两个M-M离合器的无刷式DC-AC/AC-DC宏换向器次同步鼠笼式转子飞轮电动机/发电机
只有在M-M离合器与ICE没有接通时,HEV才是电动的。同时,在再生制动期间,电能被提供给CH-E/E-CH蓄电池。
如果ICE在驱动车辆,则ICE侧的M-M离合器被打开,DC-AC宏换向器异步鼠笼式转子飞轮E-M电动机的鼠笼式转子接下来可以起一个飞轮的作用。此外,这一电动驱动装置充当起动机E-M电动机和车载M-E发电机【SEIFFERT AND WALZER 1991】。
汽车的电力大约是10%的ICE输出功率,这对在平地以60km/h速度行驶和至大约10%的第一档爬山来说是足够的。ICE主要用于加速和维持车速在60km/h以上。
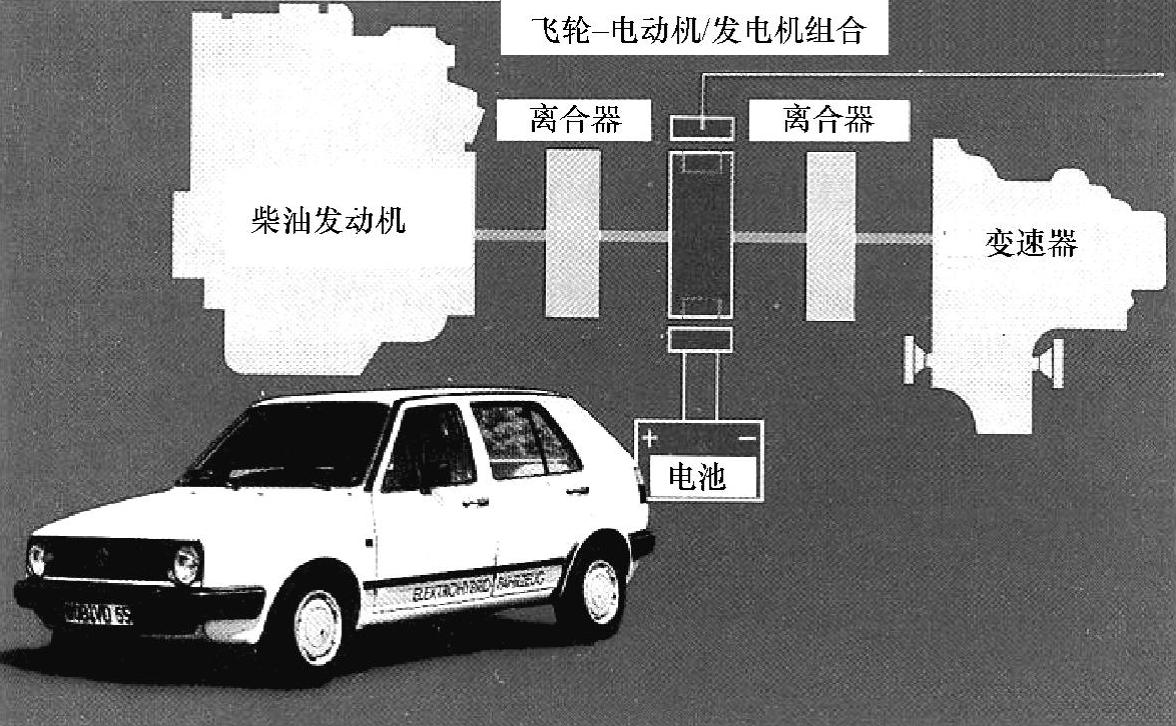
图2-133 大众高尔夫HEV II的并联式HE变速器装置【VW-Bosch-LUK;SEIFFERT AND WALZER 1991】
E-M电动机在不可缺少的驱动功率低于ICE输出功率的10%的时候使用。这一规定通常在城市交通中适用。的确,可以在HEV中使用高能CH-E/E-CH蓄电池(如锂离子、锂聚合物、镍氢或钠硫蓄电池)来获益。在特别反感噪声和尾气排放的居民区,可以完全使用AE驱动。在这种情况下的加速会被限制。对于长途旅行,利用一个简单的提升工具可隔开一个供应电力的CH-E/E-CH蓄电池,以便可以访问补充的蓄电池空间。在这种情况下,只有ICE用于驱动,电驱动装置仍然充当起动机E-M电动机和车载M-E发电机【SEIFFERT AND WALZER 1991】。
因为为两个动力设备中每一个分配的任务都是其最适合的,所以并联式混合电动变速器装置特别节能高效和环保。
与传统ICE驱动汽车的区别是,相当于60%的矿物燃料通过补充的电能应用收回。尾气排放的减少在40%~60%变化。如果电能从非化石能源产生,则在夜间对CH-E/E-CH蓄电池的再充电需要大约15kW·h,同时CO2排放减少60%【SEIFFERT AND WALZER 1991】。(https://www.xing528.com)
目前在开发中的实验计划可以解决如下问题:不同的CH-E/E-CH蓄电池在日常交通荷载下可能会如何工作;其预期寿命会是什么样;为满足日常交通中的任务应采用哪种汽车概念。
HEV技术正在开发中,已提出并评估了几种其他的HE变速器装置。开发并联式HE DBW 2WD驱动机电一体化控制系统的HE变速器装置的一个主要原因,是从根本上改善燃料经济性,同时也可能降低污染。HEV一个难解决的问题是行驶里程。为了成为一个令人信服的竞争者,就必须要提供一个与传统的汽车相媲美的行驶里程【DELPRATE ET AL. 2001】。
不同的机电一体化控制方法被提出来。有些汽车科学家和工程师已提出了一个策略,该策略基于一个等效燃油流量的燃料消耗标准和瞬态最小化【PAGANELLI ET AL. 2000】。
他们提出了一个针对给定的驾驶时间表(driving schedule)的最佳解决方案,也和其他人提出的策略进行了对比【SEILER AND SCHRÖDER 1998】。这些是适合比较的,因为两者都应用了一个瞬态最小化标准【PAGANELLI ET AL. 2000】。
选择的HE变速器装置的工作点使得总效率损失最小化。基于模拟退火算法(annealing)的全局优化是一个准则,尽管该方法不能用于实时机电一体化控制。
仿真结果显示,概念验证HEV在欧洲正常行驶工况期间的燃油消耗量是【PAGANELLI ET AL. 2000】:
• 损失最小化策略:7.0L/100km;
• 等效油耗最小化策略:6.6L/100km;
• 基于退火算法的全局优化:6.3L/100km。
由一些汽车科学家和工程师执行的实验过程中,使用了两个标准化的行驶工况:城市工况和城郊行驶工况【KLEIMAIER AND SCHRÖDER 2000】。
他们提出一个用在概念验证HEV的ICE、E-M/M-E电动机/发电机和CVT上的最优机电一体化控制向量,如图2-134所示【PERSSON 2004】。

图2-134 概念验证HEV,一辆带用在ICE、E-M/M-E电动机/发电机和CVT上的最优机电一体化控制向量的改装欧宝Astra【KLEIMEIER AND SCHRÖDER 2000;PERSSON 2004】
最优机电一体化控制向量在程序DIRCOL的帮助下计算,DIRCOL帮助搜索最优机电一体化控制问题的一个数值解。计算和接下来的最优控制向量的使用,使得城市行驶工况期间燃料消耗从6.2L/100km下降至了5.0L/100km【STRYK 1994】。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。