



从技术文献,对在直道上和转弯中的轮胎制动响应的动力已经非常熟悉了。直道和弯道行驶中加速力的传递,服从制动期间应用的相同的定性原则【CZINCZEL 1995】。
制动应用的滑移率:
由如下比率代替:
其中,θRr≥VF。
加速滑移率的范围可以从0到非常高的数字,其中非常高的数字用来描述当驱动轮在试图立定加速期间自由旋转的时候可能发生的情况。
图2-62~图2-64显示了根据加速滑移率的加速度和侧力系数【CZINCZEL 1995】。
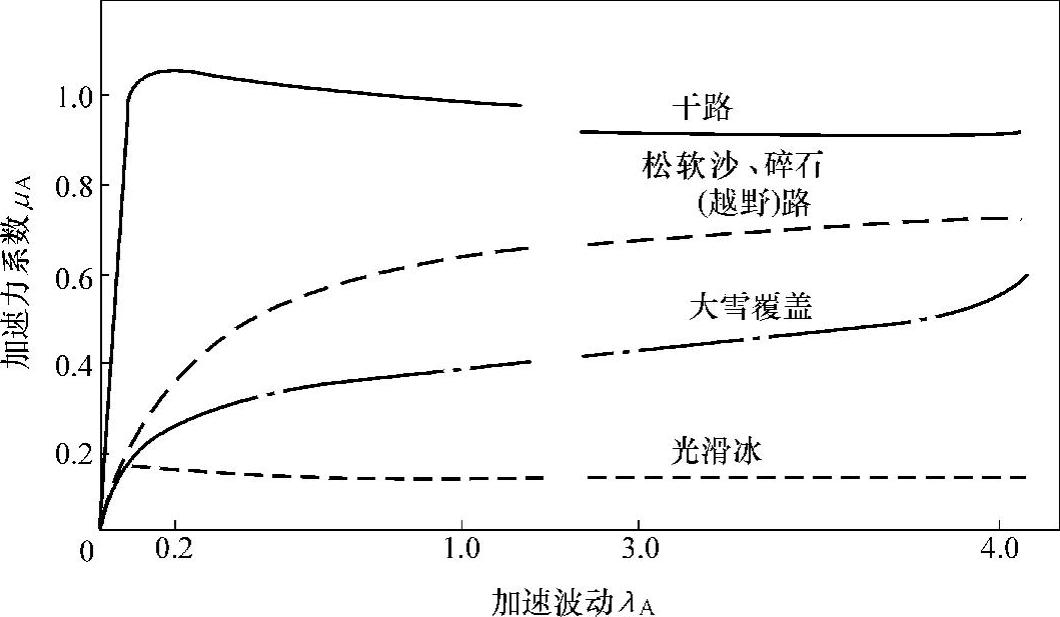
图2-62 根据加速滑移率λA的加速度μA的附着系数【CZINCZEL 1995】
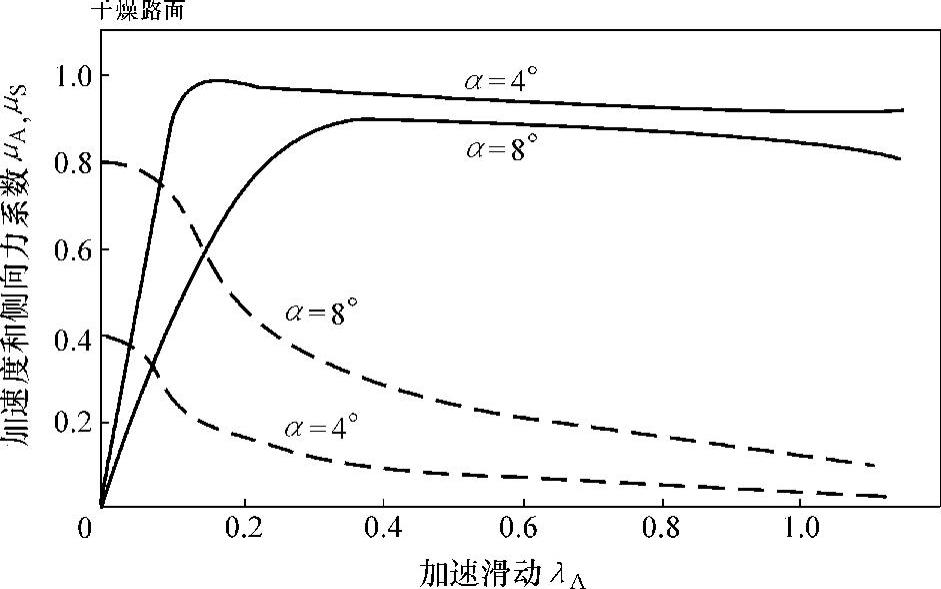
图2-63 在不同侧滑角α的加速度和侧向力系数【CZINCZEL 1995】
图2-62所示为直道行驶期间的加速度。在这种情况下(包括,如补偿侧风),对横向附着力储备的需求很小;因此,驱动力比较突出(salient)。
在干燥公路/越野路面上,在滑移率10%~30%时可以获得最大的驱动力,同时针对旋转驱动轮的驱动力有5%~10%的提升。(https://www.xing528.com)
在光滑冰面上,最大驱动力在特别小的加速滑移率(2%~5%)时获得。
在松软沙路和碎石路,以及积雪很深的道路上(特别结合使用防滑轮胎),加速力系数可以随滑动率持续增加,期间只有滑动率超过60%时,才会得到各自的加速力系数最大值。
因此,ASR的工作范围内发现的2%~20%的滑移率可能无法提供所有工作条件下足够的驱动力。为此,所有已知ASR系统都包含滑转控制阈设定开关或ASR解除开关,这些开关要么允许驾驶人实质上将ASR侧滑控制阈值重设至更高的水平,要么在需要的时候完全关掉系统。
图2-63和图2-64适用于转弯期间的加速。在这种情况下,作为车辆的侧向加速度率的函数,驱动轮受不同程度的侧向力的制约。
递增加速滑动(和递增加速力)引起侧向力的下降,然后下降的侧向力通过衰竭到残余量响应进一步增高的滑移率。
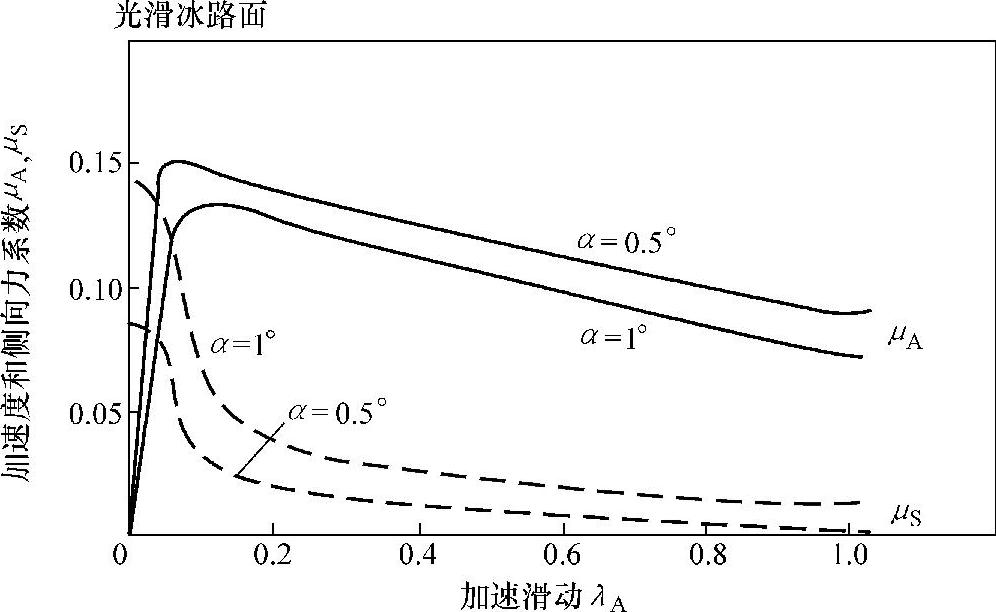
图2-64 在不同侧滑角α的加速度和侧向力系数【CZINCZEL 1995】
图2-63表示在一个干燥公路/越野路面上的响应模式。曲线以0的加速滑移率为起点。开始,侧向力系数显示一个温和的下降趋势。然而,加速力系数的不断增大引起侧向力系数的大幅下跌。
图2-63也显示,如果要想维持足够的侧向力,就必须将加速力限制在其最终潜力的某个部分。
在光滑冰面上(图2-64),极其有限的摩擦力潜能意味着在加速中的车辆稳定性只在相对较小的侧滑角(约≤2°)保持可用。
相对小的侧滑角(≤5°)可能足以引起侧向力系数的急剧下降。这清楚地表明,在光滑冰面(以及其他低摩擦公路/越野路面)上需要一个极其精确和灵敏的侧滑控制。
因此,ATC系统必须显示出高度的监测精度,同时信号处理和末级控制元件的执行也必须快速而准确。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。